







引言
随着机器视觉技术的蓬勃发展,三维成像方法经历了从接触式到非接触式、从手工到自动化的转变,应用领域涉及颇广,如三维测量、工业检测、无序抓取、三维物体识别等。摄像机的高精度标定则是技术变革与广泛应用的基础,因为标定的精度与稳定性直接影响着整个系统的结果。本文主要介绍比较有代表性的几种摄像机标定算法。
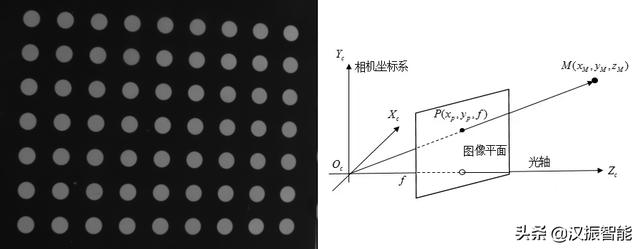
摄像机内部参数主要包括焦距、倾斜因子、图像中心坐标和镜头畸变等;摄像机外部参数主要指摄像机系统与摄像机系统之间的旋转、平移矩阵。通过设计摄像机成像的数学模型,加上空间中已知的三维坐标点与对应的图像坐标之间的一一对应关系,便可求出这些摄像机参数,这个过程称为摄像机标定。
摄像机标定技术最常见的分类方式为根据是否需要标定物分为传统标定方法、自标定方法和基于主动视觉的标定方法;还有根据摄像机成像模型可分为线性模型、非线性模型和无特定模型;根据摄像机的个数可分为单目标定、双目标定和多目标定法;根据标定物的维度,可分为基于一维标定物的方法、基于二维标定物的方法和基于三维标定物的方法。本文则根据最常用的分类方法,展开对摄像机标定的介绍。
1. 传统标定法
传统标定法是指给定一个高精度的标记物(如标定板,标定球或者标定块),已知标定物上的点坐标,使用摄像机对其拍照,即可确定这些已知点在图像中的像素坐标,将这些一一对应关系代入预先设定的
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 1897
1897











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









