







 1.重复定位精度(RP)与绝对精度(RT)
1.重复定位精度(RP)与绝对精度(RT)
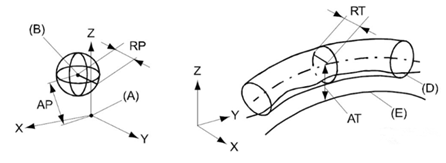
机器人N次向同一个理论编程点运动,所有的机器人真实到达位置被一个最小的球体覆盖,这个球体的半径就是重复定位精度;
机器人N次走一条固定的轨迹,所有的机器人真实轨迹被一个最小的蠕动圆柱覆盖,这个球体的半径就是绝对精度。
我们在操作机器人进行工作时,经常会遇到以下问题:
1.重复定位精度(RP)与绝对精度(RT)
机器人N次向同一个理论编程点运动,所有的机器人真实到达位置被一个最小的球体覆盖,这个球体的半径就是重复定位精度;
机器人N次走一条固定的轨迹,所有的机器人真实轨迹被一个最小的蠕动圆柱覆盖,这个球体的半径就是绝对精度。
我们在操作机器人进行工作时,经常会遇到以下问题:
 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章




















