M70与M80 ,均是标配第四轴功能的,不需要开通选项功能。
a.开通第四轴功能
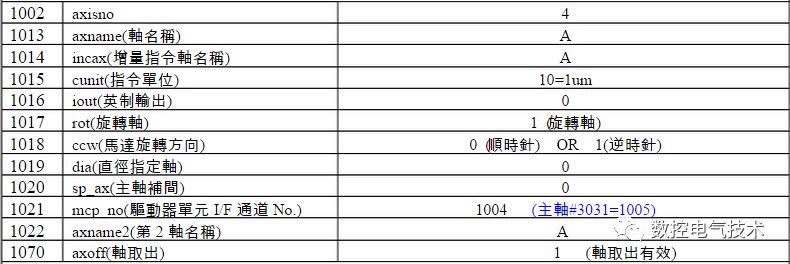
№ 1002=4
按下急停按钮,点击机台关机电源, 关闭机床总电源,再开启机床总电源,再开机。
b.定义第四轴名称:
1013=A:第四轴名称为A
c.格式化,使上述参数设定生效。
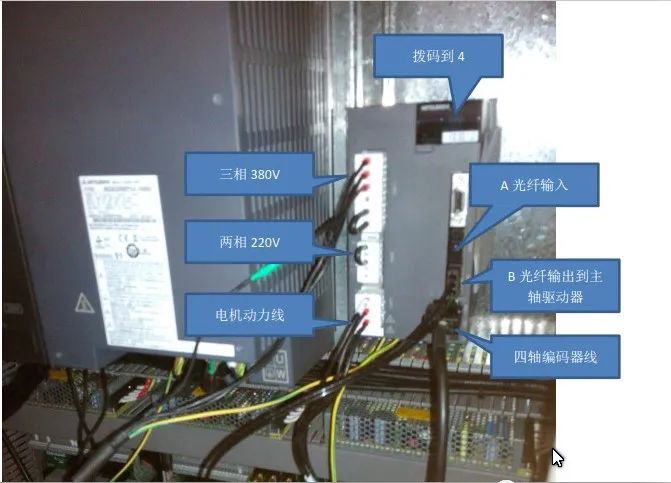
c.旋钮开关设定:定义轴号
以MDS-EM-SPV310080B搭配MDS-D-SVJ-10NA一体型放大器为例,第四轴旋钮开关设4.
注意:三菱加四轴注意参数1021、3031以及轴号旋钮的设定。设定错误,会有通讯错误报警。本案例设定如下:
3031(设1001)
1021(X设1002)
1021(y设1003)
1021(z设1004)
1021(4设1005)
一体驱动器波段开关设0,第四轴驱动器波段开发设4
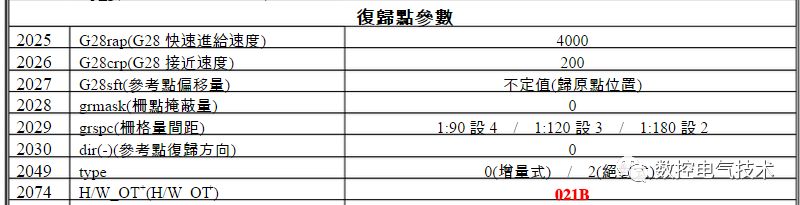
d.设定NC侧其他参数

e.根据对应电机与放大器设定A轴伺服参数

标 题 | 电控附加功能作业指导书 | 编 号 | | 页 次 | 5/15 | |
參數 | 馬達型號 | HF54 | HF104 | HF154 | HF204 | HF75 | SVJ3 | V1 | SVJ3 | V1 | SVJ3 | V1 | SVJ3 | V1 | SVJ3 | V1 | 伺服參數 | 2201 | PC1(馬達側齒輪比) | 1 | 1 | 2202 | PC2(機械側齒輪比) | 90 / 120 / 180 | 90 / 120 / 180 | 2203 | PGN1(位置迴路增益1) | 33/47 | 33/47 | 2204 | PGN2(位置迴路增益1) | 86/125 | 86/125 | 2205 | VGN1(速度迴路增益1) | 80~120 | 80~120 | 2206 | VGN2(速度迴路增益2) | 0 | 0 | 2207 | VIL((速度迴路延遲補償) | 0 | 0 | 2208 | VIA(速度迴路前進補償) | 1900 | 1900 | 2209 | IQA(電流迴路q軸前進補償) | 20480 | 20480 | 15360 | 10240 | 15360 | 10240 | 8192 | 8192 | 20480 | 20480 | 2210 | IDA(電流迴路d軸前進補償) | 20480 | 20480 | 15360 | 10240 | 15360 | 10240 | 8192 | 8192 | 20480 | 20480 | 2211 | IQG(電流迴路q軸增益) | 3072 | 3072 | 2560 | 1280 | 2560 | 1536 | 3072 | 2048 | 1792 | 768 | 2212 | IDG(電流迴路d軸增益) | 3072 | 3072 | 560 | 1280 | 2560 | 1536 | 3072 | 2048 | 1792 | 768 | 2213 | ILMT1(靜態定格電流對應的比例) | 800 | 800 | 2214 | ILMTsp(靜態定格電流對應的比例) | 800 | 800 | 2215 | FFC(加速度前饋進給增益) | 100 | 100 | 2216 | LMC1(失位運動補正增益1) | 0 | 0 | 2217 | SPEC(伺服規格) | 絕對值設定1080 (光學尺設定0100) 增量式一定要設0000,才有辦法設定#2225參數 | 2218 | PIT(導螺桿螺距) | 360 | 360 | 2219 | RNG1(位置檢測器分解能) | 1000 | 1000 | 2220 | RNG2(速度檢測器分解能) | 1000 | 1000 | 2221 | OLT(過負荷時間常數) | 60 | 60 | 2222 | OLL(過負荷檢測準位) | 150 | 150 | 2223 | ODI(誤差寬度1) | 10 | 10 | 2224 | INP(定位寬度值) | 50 | 50 | 2225 | MTYP(馬達型式) | 2203 | 2204 | 2205 | 2207 | 2201 | 2226 | OD2(誤差過大輔2) | 10 | 10 | 2227 | SSF1(特殊伺服機能1) | 4000 | 4000 | 2236 | PTYP(回生電阻型式) | 接1支RB036 26Ω設定1000 | 2246 | SV046 | 0 | 0 | 2247 | EC1(誘起電壓補正) | 100 | 100 | 2249 | PGN1SP(主軸位置迴路增益1) | 15 | 15 | 2253 | DFBN(誤差過大輔3) | 100 | 100 | 2257 | SHGC(平滑高增益控制定數) | 187/282 | 187/282 | 8201 | 軸取出 (軸要取出設1) | 0 | 0 | 8202 | 軟體極限無效 | 1 | 1 | 8204 | OT-check(過行程檢查的(-)向座標 | 1 | 1 | 8205 | OT+check(過行程檢查的(+)向座標 | 1 | 1 | 8213 | 旋轉軸型式 (旋轉捷徑有效) | 1 | 0 | PLC開關8 (F12 VALID) 設ON L81=1顯示第四軸[ ] ; 軸要移出時,只要PLC開關20=ON 即可 | I/F診斷L72=1è不然重新開機時,直接按程式起動時,不會提示第四軸歸原點的訊息. 37. F37 4-5AXIS NO HOME | M40: 第四軸夾(X20E=CF31-B6)(Y208) ; M41: 第四軸鬆(X20F=CF31-B5)à此條件滿足,才可以動作第四軸 | 6410 Bit1=1 è+5/-5才有效 ; L78=1 è單節按鈕才有效 ; +5LEDè Y26A ; -5LEDè Y26B | I/F診斷L71=1è不然重新開機時,直接按程式起動時,不會提示第五軸歸原點的訊息. 37. F37 4-5AXIS NO HOME | M50: 第五軸夾(CF31-B7 =X20D) ; M51: 第五軸鬆(CF31-A18 =X212)à此條件滿足,才可以動作第五軸 不然會有外部互鎖警報無法動作 | | | | | | | | | | | | | | | | | | | | | | |
|
标 题 | 电控附加功能作业指导书 | 编 号 | | 页 次 | 6/15 | |
M70系列HF第四/五軸參數之設定 :
参数 | 馬達型號 | HF54 | HF57 | HF104 | HF154 | HF204 | 基本參數 | 1002 | axisno | 4 | 5 | 1003 | iunit (輸入設定單位) B=1um | B | B | 1004 | ctrl_unit (控制單位) D=0.01um | D | D | 1005 | plcunit (PLC 單位) B=1um | B | B | 1006 | mcmpunit (機械誤差補償單位) B=1um | B | B | 1010 | srvunit(輸出單位) D=0.01um | D | D | 1013 | axname(軸名稱) | C | B | 1014 | incax(增量指令軸名稱) | C | B | 1015 | cunit(程式指令單位) 10=1um | 10 | 10 | 1016 | iout(英制輸出) | 0 | 0 | 1017 | rot(旋轉軸) (0直線軸;1 旋轉軸) | 1 | 0 | 1018 | ccw(馬達旋轉方向) (0順時針;1逆時針) | 0 | 1 | 1019 | dia(直徑指定軸) | 0 | 0 | 1020 | sp_ax(主軸補間) | 0 | 0 | 1021 | mcp_no(驅動器單元I/F通道No ) | 1004 (主軸#3031=1005) | 1005 (主軸#3031=1006) | 1022 | axname2(第2軸名稱) | A | B | 1070 | axoff(軸取出) (1:軸取出有效) | 1 | 1 | 軸規格參數 | 2001 | rapid(快速進給) | 4000 | 4000 | 2002 | clamp(切削進給速度鉗住機能) | 2000 | 2000 | 2003 | smgst(加速減速模式) | 0021 | 0021 | 2004 | GotL(G0時間常數) | 150 | 150 | 2005 | Got1(G0時間常數一次延遲) | 1 0 | 100 | 2006 | Got2 | 100 | 100 | 2007 | G1tL(G1時間常數) | 30 | 30 | 2008 | G1t1(G1時間常數一次延遲) | 30 | 30 | 2009 | G1t2 | 30 | 30 | 2010 | fwd_g(前饋進給增益) | 45 | 45 | 2011 | G0back(G0背隙補正) | 不定值 | 不定值 | 2012 | G1back(G1背隙補正) | 不定值 | 不定值 | 2013 | OT-(軟體極限І-) (設1無角度限制) | 1.000 | -120 | 2014 | OT+(軟體極限І+) (設1無角度限制) | 1.000 | 30 | 2017 | tap_g(攻牙時位置迴路增益) | 15 | 15 | 復歸點參數 | 2021 | out_f(體極限範圍外最大速度) | 4000 | 4000 | 2025 | G28rap(G28快速進給速度) | 4000 | 4000 | 2026 | G28crp(G28接近速度) | 200 | 200 | 2027 | G28sft(參考點偏移量) (歸原點位置) | 不定值 | 不定值 | 2028 | grmask(柵點掩蔽量) | 0 | 0 | 2029 | grspc(柵格量間距) | 1:90設4 / 1:120設3 / 1:180設2 | 1:90設4 / 1:120設3 / 1:180設2 | 2030 | dir(-)(參考點復歸方向) | 0 | 0 | 2049 | type (0:增量式) ; (2:絕對式) | 0 or 2 | 0 or 2 | 2073 | H/W_OT+(H/W OT+) | 021B | 025C | | | | | | | | |
#1017=0為直線軸,如移動500則座標顯示500度 ;#1017=1為旋轉軸時則座標顯示140度 #轴显示不对齐,修改参数P1022重置X/Y/Z/A,即可 |







 本文介绍了三菱M80系统第四轴的开通步骤和参数设定,包括1002参数设置、轴名称定义、旋钮开关设定、3031和1021参数调整,以及一体驱动器的波段开关设定,强调了设定错误可能导致的通讯错误报警问题。
本文介绍了三菱M80系统第四轴的开通步骤和参数设定,包括1002参数设置、轴名称定义、旋钮开关设定、3031和1021参数调整,以及一体驱动器的波段开关设定,强调了设定错误可能导致的通讯错误报警问题。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









