







简介:在MATLAB环境中,GUI与Simulink分别用于交互式编程和系统级仿真。本博客相关文件详细探讨了如何在两者之间进行数据传输,以实现灵活的工程应用。通过具体的实例,如 SineFunc.fig GUI文件和 SineDisplay.slx Simulink模型,展示了如何使用回调函数和MATLAB函数块实现GUI参数与Simulink模型之间的实时交互,并强调了这种技术对于提高仿真工作效率的重要性。 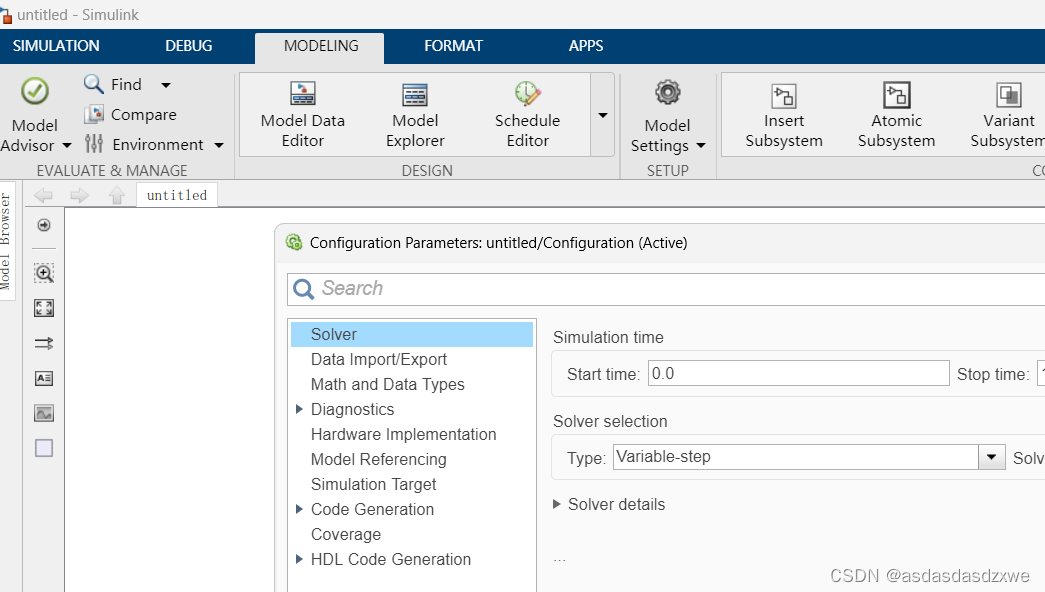
1. MATLAB GUI与Simulink简介
1.1 MATLAB GUI定义与功能
MATLAB GUI是用户与应用程序交互的图形界面,它允许用户通过点击按钮、输入数据等简单操作进行复杂计算,而无需编写命令行代码。GUI不仅提高了工作效率,也使得对非专业人士来说,利用复杂的数学模型和算法变得更加简单。
1.2 Simulink定义与工程意义
Simulink是MATLAB的一个扩展模块,主要用于多域仿真和基于模型的设计。它通过拖拽式界面构建动态系统模型,模拟、分析和验证各种系统。在工程实践中,Simulink广泛应用于控制系统、信号处理等领域,可以有效缩短研发周期,减少开发成本。
1.3 GUI与Simulink的重要性
在当今科技飞速发展的背景下,GUI与Simulink在产品设计、测试和验证等多个环节中扮演着至关重要的角色。它们可以将复杂的系统以直观的方式呈现出来,并通过仿真技术来预测系统性能。因此,掌握它们的使用与优化,对于工程和科研人员来说具有重要的实用价值。
2. GUI与Simulink的数据传输机制
2.1 数据传输的基本原理
2.1.1 GUI与Simulink的数据交换接口概述
MATLAB的GUI与Simulink是两个强大的工具,它们可以独立使用,也可以协同工作。为了实现它们之间的协同,需要了解数据如何在两者之间传输。GUI主要通过图形界面提供用户交互,而Simulink则提供了一个图形化编程环境用于构建和模拟动态系统。当我们在GUI中采集用户输入,并需要将这些数据传递给Simulink进行进一步处理时,数据交换接口就显得尤为重要。
GUI与Simulink之间的数据交换接口可以是MATLAB函数(如回调函数)或是Simulink的接口模块(如To Workspace和From Workspace模块)。这些接口允许不同类型的数据(如标量、向量、矩阵等)在两者间传递,同时提供了数据类型转换、数据流控制等功能,确保数据在传输过程中的正确性和完整性。
2.1.2 数据类型转换与数据流控制
在数据传输过程中,需要特别注意数据类型的一致性和转换问题。GUI中数据的表示形式与Simulink中的数据表示形式可能存在差异,例如GUI中可能使用字符串来表示数字,而在Simulink中则需要数值类型的数据。因此,在数据传输之前需要进行适当的数据类型转换,以避免数据类型不匹配导致的错误。
数据流控制是为了管理数据在GUI与Simulink之间传输的顺序和时机。正确的数据流控制可以保证数据的一致性,防止数据丢失或重复处理。例如,在GUI中点击一个按钮开始数据传输,在Simulink模型接收到数据后开始仿真,这样的顺序和时机控制至关重要。
2.2 数据传输的实现方法
2.2.1 利用回调函数进行数据传输
回调函数是GUI与用户交互的桥梁,它们响应用户的动作,并执行相应的数据处理和传输。例如,在GUI界面上,用户可能通过输入框输入数据,随后点击“提交”按钮触发一个回调函数,该函数读取输入框中的数据,并将数据传递给Simulink进行处理。
回调函数的实现可以使用MATLAB的内置语法,例如:
function submitButton_Callback(hObject, eventdata, handles)
% hObject handle to submitButton (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% 获取输入数据
inputData = get(handles.inputBox, 'String');
% 将数据转换为数值
numericData = str2double(inputData);
% 调用Simulink模型进行处理
sim('SineModel');
end
在这个回调函数中,我们首先从GUI的输入框中获取字符串数据,然后将其转换为数值类型,并通过调用Simulink模型 SineModel 进行处理。
2.2.2 使用信号线和信号处理模块的数据交互
Simulink提供了丰富的信号线和信号处理模块,可以用来实现更复杂的数据交互和信号处理。例如,可以使用To Workspace模块来捕获Simulink模型中的信号并将其传递到MATLAB工作空间,或者使用From Workspace模块将MATLAB工作空间中的数据传递到Simulink模型中进行进一步处理。
在Simulink模型中,To Workspace模块可以设置如下参数:
set_param('SineModel/To Workspace', 'VariableName', 'outSignal');
该代码设置To Workspace模块的输出变量名为 outSignal 。当模型运行时,Simulink会将信号存储在MATLAB工作空间中的变量 outSignal 中。之后,我们可以在GUI中通过回调函数访问 outSignal 变量,并根据需要进行显示或进一步处理。
2.3 数据传输中的常见问题及解决策略
2.3.1 数据同步问题及解决方案
数据同步是确保数据在GUI与Simulink之间正确传递的重要因素。当数据量较大或者传输频率较高时,可能会发生数据不同步的情况。例如,GUI中用户输入的数据可能在Simulink模型尚未准备接收时就发送了,或者Simulink模型处理的数据还未返回给GUI时,GUI再次请求新数据。
为解决数据不同步问题,可以采用以下策略: 1. 在GUI端,引入一个状态标志,显示Simulink模型的接收状态,只有在Simulink准备接收数据时才允许用户进行输入。 2. 在Simulink端,设置合适的仿真时间步长,避免过快的处理速度导致数据来不及传输。 3. 使用缓冲区来暂时存储数据,确保数据传输不会因为处理速度的差异而中断。
2.3.2 数据精度和数据类型兼容性问题
数据精度和类型兼容性问题是数据传输中的另一常见问题。例如,GUI中用户输入的是单精度浮点数,但Simulink模型中需要双精度浮点数进行计算。
解决数据精度和类型兼容性问题的方法包括: 1. 在GUI到Simulink的数据传输过程中,进行显式的类型转换。 2. 在Simulink模型中设置数据类型属性,以确保模型接受的数据类型与GUI发送的数据类型一致。 3. 在Simulink模型中合理配置数值计算精度,避免因为精度问题造成仿真结果不准确。
通过以上的分析和解决策略,我们可以确保在GUI与Simulink之间进行有效且准确的数据传输。接下来,我们将深入探讨一个具体的GUI文件 SineFunc.fig 的功能描述。
3. SineFunc.fig GUI文件功能描述
3.1 GUI界面的构建与布局
GUI,即图形用户界面,是软件中提供用户交互的可视化平台。通过图形化元素,用户可以直观地与程序进行交流,执行操作并获取反馈。对于 SineFunc.fig 这一GUI文件,我们将从构建与布局的角度进行深入介绍,使用户了解其工作原理和操作方法。
3.1.1 主要控件功能介绍
在 SineFunc.fig 中,主要控件包括:
- 图形显示区域 :用于展示正弦波形的图形。这个区域响应用户输入的频率和振幅参数,实时绘制出相应的波形。
- 频率输入框 :允许用户输入或调整正弦波的频率值。
- 振幅输入框 :允许用户输入或调整正弦波的振幅值。
- 生成按钮 :当用户填写完频率和振幅参数后,点击此按钮将触发波形生成。
- 重置按钮 :用于重置输入的参数到默认值,并清除图形显示区域中的波形。
每一个控件都承载着特定的功能,是用户操作GUI与程序交互的重要途径。
3.1.2 用户交互逻辑设计
SineFunc.fig 的用户交互逻辑是简单且直观的:
- 用户首先在频率和振幅输入框中填写或调整参数。
- 点击生成按钮后,程序读取这两个输入框的值。
- 程序根据输入的值,利用回调函数计算并生成正弦波形,最后显示在图形显示区域。
- 用户可以通过重置按钮来清除当前设置并重置为默认参数。
为了保证用户交互的顺畅,对输入框和按钮的响应时间必须尽可能短,这需要在回调函数的编写上做性能优化。
3.2 回调函数与控件事件响应
回调函数在MATLAB GUI中扮演着至关重要的角色。它们响应用户事件,比如按钮点击或数据输入,并触发相应的处理程序。
3.2.1 事件触发机制分析
在MATLAB中,GUI组件(控件)的事件会触发回调函数的执行。例如,在 SineFunc.fig 中,当用户点击“生成”按钮时,按钮的 Callback 属性将启动一个回调函数,该函数根据用户输入的频率和振幅值进行波形的计算和绘制。
MATLAB中常见的事件类型包括:
- 按钮点击事件
- 文本框输入事件
- 下拉菜单选择事件
- 滑块移动事件
每一种事件类型在回调函数中都有一个特定的变量来标识。
3.2.2 回调函数代码实现与调试
下面是一个简化的回调函数代码示例,用于生成正弦波形:
% --- Executes on button press in generateButton.
function generateButton_Callback(hObject, eventdata, handles)
% hObject handle to generateButton (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% 读取用户输入的频率和振幅
freq = str2double(get(handles.freqInputBox, 'String'));
amp = str2double(get(handles.ampInputBox, 'String'));
% 计算正弦波数据
t = linspace(0, 2*pi, 1000); % 时间向量
y = amp * sin(2*pi*freq*t); % 正弦波数据
% 绘制正弦波
plot(handles.graphArea, t, y);
xlabel('Time (s)');
ylabel('Amplitude');
title(['Sine Wave of Frequency: ', num2str(freq), ' Hz']);
在上述代码块中, generateButton_Callback 是与“生成”按钮关联的回调函数。 hObject 是触发事件的控件句柄, eventdata 是一个可选参数, handles 包含了其他所有GUI控件的句柄。函数中首先通过 get 函数读取了频率和振幅输入框的值,然后进行正弦波的计算,最后通过 plot 函数将波形显示在图形显示区域。
执行逻辑上,该函数首先需要将用户输入的字符串转换为数值类型,然后根据正弦函数公式计算对应的波形数据,最后通过 plot 函数将其可视化。
调试回调函数时,必须确保输入的数值能够正确转换,并且波形绘制过程中的每个步骤都按预期执行。如果绘制失败或数值计算不正确,需要使用MATLAB的调试工具进行逐步检查,找出逻辑错误或数值问题所在。
在GUI的应用和开发中,回调函数是与用户交互的桥梁,只有深入理解并妥善处理回调函数,才能保证应用的稳定性和用户体验的流畅性。
4. SineFunc.m 回调函数的作用
4.1 回调函数在数据处理中的角色
4.1.1 回调函数与GUI数据流的关系
回调函数(Callback Function)在GUI设计中扮演着重要角色,它定义了用户交互后程序的具体响应行为。在MATLAB GUI中,回调函数将用户操作如按钮点击、滑动条变化等与数据处理逻辑绑定,从而实现对GUI数据流的控制。每种控件类型通常都有自己特定的回调函数,如按钮点击的callback对应 pushbutton_callback 函数,而文本框内容改变则可能对应 edit_callback 函数。
在 SineFunc GUI的上下文中,回调函数的设置通过MATLAB的GUIDE工具或编程方式进行,其中 SineFunc.m 文件内会包含特定于各个控件的回调函数代码。当用户与GUI进行交互时,如调整频率滑动条或点击生成正弦波按钮,相应的回调函数被触发,执行预设的数据处理流程。
4.1.2 回调函数实现用户输入的数据处理
回调函数除了响应用户操作外,一个核心职责是处理用户输入的数据。例如,在 SineFunc.m 中,用户通过GUI界面输入正弦波的频率和幅度,这些数据会首先被赋值给相应的回调函数参数,然后回调函数会将这些输入值进行有效性检查,例如确认输入是否为数值类型,范围是否在合理区间内等。只有通过验证的数据才会被用于后续的数据处理,如计算正弦波的数学模型并展示结果。
回调函数的实现中,可以使用MATLAB提供的函数如 str2double 将文本转换为数值,使用 isnumeric 等函数进行输入类型和范围的检查。这些操作通过精心编写与组织的代码块来完成,确保了数据处理的准确性和鲁棒性。
% 示例回调函数,处理用户输入的正弦波频率
function frequency_callback(hObject, eventdata, handles)
% hObject handle to frequency (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% 获取用户输入的频率值
freqInput = get(handles.freqEdit, 'String');
% 将输入的字符串转换为双精度浮点数
freqValue = str2double(freqInput);
% 检查转换是否成功以及值是否在合理范围内
if isnumeric(freqValue) && freqValue > 0 && freqValue <= 1000
% 如果输入合法,更新频率变量并继续后续处理
handles.freqValue = freqValue;
guidata(hObject, handles);
% 可以继续编写生成正弦波的代码等
else
% 如果输入不合法,可以设置错误提示等
errordlg('请输入有效的频率值(0-1000Hz)', '输入错误');
end
end
在上述代码块中,回调函数 frequency_callback 通过 get 函数获取文本框中的字符串输入,并利用 str2double 将其转换为数值型数据。接着使用 isnumeric 和逻辑判断语句验证输入的合法性。这样的处理方式保证了只有符合要求的数据才会被用于生成正弦波,同时,通过错误提示,增强了用户交互的友好性和程序的健壮性。
4.2 回调函数代码分析与优化
4.2.1 代码实现细节和逻辑流程
回调函数的代码实现通常包括初始化、事件监听、数据处理、结果输出等步骤。以 SineFunc.m 为例, pushbutton_generate 按钮的回调函数将涉及以下逻辑:
- 获取用户输入的频率和幅度值。
- 对输入值进行检查,确保它们是合法的数值。
- 生成正弦波数据。
- 将正弦波数据展示在GUI界面上。
在MATLAB中,这些步骤可以通过函数封装来优化代码的复用性和可维护性。例如,可以将数据验证和正弦波生成的过程封装成单独的函数,回调函数仅负责触发这些过程。这样不仅代码结构更清晰,也便于对每个功能模块进行独立的测试和优化。
% 函数封装示例:验证用户输入的正弦波参数
function [freq, amp] = validateSinewaveParams(freqStr, ampStr)
freq = str2double(freqStr);
amp = str2double(ampStr);
if ~isnumeric(freq) || ~isnumeric(amp) || freq <= 0 || amp <= 0
error('输入的频率和幅度值必须为正数');
end
end
% 函数封装示例:根据参数生成正弦波数据
function sineWaveData = generateSineWave(freq, amp)
% 生成正弦波数据的代码...
% 例如使用MATLAB内置函数linspace和sin
end
% 回调函数中调用封装的函数来处理用户输入和生成正弦波
% ...
% 使用封装函数的好处
% 1. 代码更易于阅读和理解
% 2. 可以独立测试和调试每个功能模块
% 3. 便于功能的扩展和维护
4.2.2 性能优化与调试技巧
回调函数在性能优化方面可以从多个角度着手。一方面,针对计算密集型任务,可以考虑算法优化,例如通过矩阵运算替代循环,利用向量化操作来加速数据处理。另一方面,对于GUI响应,可以优化控件更新策略,减少不必要的重绘操作,提高交互响应速度。
调试回调函数时,通常可以使用MATLAB的调试工具,如设置断点、逐步执行代码等。此外,打印关键变量值和使用条件语句输出中间结果对于理解程序执行流程非常有用。在代码中合理使用 disp 函数或 fprintf 函数输出调试信息,可以帮助开发者定位问题。
以下是一个简单的性能优化和调试技巧示例,使用矩阵操作替代循环来加速数据处理:
% 使用循环计算正弦波数据
tic
waveData = zeros(1, 1000);
for i = 1:1000
waveData(i) = sin(2*pi*i/1000);
end
toc
% 使用矩阵操作计算正弦波数据
tic
theta = linspace(0, 2*pi, 1000);
waveData_matrix = sin(theta);
toc
在上述示例中,通过使用 linspace 和 sin 函数替代传统的循环,我们能够显著提高计算效率。这种方法不仅减少了代码行数,也提高了程序的执行速度,这对于实时数据处理和交互式应用尤为重要。
调试时,可以通过在关键位置加入 disp 语句输出变量值,以验证程序的运行状态:
% 在回调函数中添加调试语句
% ...
disp(['生成的正弦波频率为:', num2str(freq)]);
disp(['生成的正弦波幅度为:', num2str(amp)]);
% ...
通过上述代码,开发者可以在回调函数执行时直接在命令窗口中查看变量的值,帮助快速定位问题所在。此外,MATLAB IDE提供的调试工具能够提供更直观的调试体验,如设置断点、单步执行等高级调试功能。
5. SineDisplay.slx Simulink模型的构成
5.1 Simulink模型的搭建流程
5.1.1 模型库中模块的选择与配置
在Simulink环境中构建模型的第一步是选择合适的模块。Simulink提供了丰富的模块库,包括信号源、信号运算、信号接收等多个类别的模块。对于 SineDisplay.slx 模型,我们会专注于信号生成和信号显示相关的模块。
- 信号源:我们选择“Sine Wave”模块来生成连续的正弦信号。
- 信号处理:考虑到信号的调节,可能会用到“Gain”模块来调整信号幅度,或者“Filter”模块来设计滤波器。
- 信号显示:模型最终需要将信号可视化,因此,将“Scope”模块加入模型,用于显示处理后的信号。
在模块库中选择模块后,需要对每个模块进行参数配置。例如,“Sine Wave”模块的“Amplitude”参数决定了信号的振幅,“Frequency”参数决定了信号的频率。通过双击模块,可以在弹出的模块参数窗口中设置这些参数值。
% 示例代码:配置Sine Wave模块参数
sineWaveBlock = 'SineDisplay/Sine Wave';
set_param(sineWaveBlock, 'Amplitude', '1', 'Frequency', '1');
5.1.2 模型参数设置与仿真环境搭建
Simulink模型的另一个重要环节是整体仿真参数的设置。这包括仿真的时长、步长、求解器类型等。
- 仿真时长和步长:这两个参数决定了仿真的精度和持续时间。较长的仿真时长可能需要更小的步长来保证结果的准确性。
- 求解器类型:选择适当的求解器对于确保仿真的稳定性和准确性至关重要。对于连续系统,通常推荐使用ODE求解器,如
ode45,而对于离散系统,则可能需要使用固定步长的求解器,比如discrete。
对于 SineDisplay 模型,我们设定仿真的时长为10秒,步长为0.01秒,使用 ode45 作为求解器。
% 示例代码:设置仿真参数
simTime = '10'; % 仿真的时长
simStep = '0.01'; % 仿真的步长
solver = 'ode45'; % 求解器类型
% 在模型中设置这些参数
set_param(gcs, 'StopTime', simTime, 'Solver', solver, 'FixedStep', simStep);
在Simulink模型中,通过配置 Simulation 参数,我们能够详细地控制仿真环境,确保信号能够按照预期被生成、处理和显示。
5.2 模型的信号处理与分析
5.2.1 信号的生成与调节
在Simulink模型中,信号的生成是通过信号源模块来实现的。对于 SineDisplay.slx 模型,正弦波信号是由“Sine Wave”模块生成的。在上一节中,我们已经对“Sine Wave”模块的参数进行了基本设置。信号的生成是整个模型的基础,必须保证信号的质量和准确性。
接下来是信号的调节过程。在本模型中,我们可能需要对信号的频率、相位和幅度进行调节。调节通常是通过信号处理模块完成的。例如,“Gain”模块可以根据需要对信号进行放大或衰减,“Transfer Fcn”模块可以用于实现特定的滤波器设计。
% 示例代码:信号调节的代码实现
gainBlock = 'SineDisplay/Gain'; % Gain模块的路径
set_param(gainBlock, 'Gain', '2'); % 将增益设置为2,放大信号
5.2.2 信号处理算法的应用与效果评估
在信号生成与调节之后,模型中应用了各种信号处理算法。在 SineDisplay 模型中,可能会使用低通滤波器来去除信号中的高频噪声,或是使用信号积分器来计算信号的累积值。
信号处理算法的效果必须通过适当的评估方法来验证。在Simulink中,使用“Scope”模块或“Display”模块来观察处理后的信号是一个常用的方法。此外,也可以使用MATLAB代码来进行数据分析,比如计算信号的信噪比(SNR)或误差。
% 示例代码:从Scope中获取数据进行分析
scopeData = simout.get('ScopeData'); % 假设simout是Scope模块的输出变量
% 分析数据...
这一系列的信号处理与分析步骤确保了信号经过模型的处理后能够达到预期的效果,也使我们对模型的性能有了清晰的认识。通过观察与分析,我们能够对模型进行调优,以满足特定的性能标准。
在本章中,我们从Simulink模型的搭建流程开始,深入探讨了如何选择和配置模块,设置模型参数,以及如何进行信号处理与分析。通过这些详细的步骤和示例代码,我们了解到,尽管Simulink提供了一个直观的图形化界面来进行模型设计,但深入理解每个模块的工作原理以及如何将这些模块协同工作来实现我们的目标是至关重要的。在下一章节中,我们将继续探索MATLAB函数块和实时工作空间(RTW)在提升模型性能和实现复杂系统仿真方面的作用。
6. MATLAB函数块和实时工作空间(RTW)的应用
6.1 MATLAB函数块的原理与应用
6.1.1 函数块的定义和配置方法
MATLAB函数块是Simulink中一种特殊的模块,允许用户将自定义的MATLAB函数嵌入到Simulink模型中。这样做的好处是能够利用MATLAB强大的算法处理能力,实现复杂的数据处理和控制逻辑。
要定义和配置一个MATLAB函数块,首先需要打开Simulink库浏览器,并从Simulink的“User-Defined Functions”库中拖出一个MATLAB Function模块。然后,双击打开它,在MATLAB编辑器中编写所需的MATLAB代码。
function y = fcn(u)
%#codegen
% Define the number of outputs
coderidders(2);
% Define the type of the inputs and outputs
u1 = coder.typeof(0); % Assuming 'u' is an integer
y1 = coder.typeof(0); % Assuming 'y' is an integer
% Define the function algorithm
y = 2 * u1;
在上述代码中, fcn 是自定义的函数名, u 是输入变量, y 是输出变量。 coder.typeof 用于定义输入和输出变量的类型和大小,这对于确保模型的实时性能至关重要。
6.1.2 函数块在数据处理中的作用和优势
MATLAB函数块在数据处理中的主要作用是提供一个灵活的编程环境,用户可以在此实现自定义的数学逻辑和算法。与其他Simulink模块相比,MATLAB函数块的优势在于其代码的可读性和易用性。
函数块的主要优势包括:
- 代码灵活性 :可以直接编写或调用任何MATLAB函数和工具箱,而无需额外的接口。
- 代码重用性 :通过定义为函数块,代码可以在不同的Simulink模型中重用,提高开发效率。
- 调试方便 :由于函数块的MATLAB代码可以在MATLAB环境中独立运行和调试,使得整个开发过程更加方便快捷。
6.2 实时工作空间(RTW)的实现与优化
6.2.1 RTW的搭建与配置技巧
实时工作空间(Real-Time Workshop,RTW)是MathWorks提供的一个工具集,用于从Simulink模型生成实时可执行代码。通过RTW,开发者可以将Simulink模型转换为嵌入式代码,用于各种实时应用。
搭建和配置RTW需要遵循以下步骤:
- 确保Simulink模型中所有的模块都支持代码生成,不包含任何无法转换为代码的元素。
- 在Simulink模型中添加RTW目标,比如“Generic Real-Time Target”。
- 配置RTW代码生成选项,包括选择目标硬件、内存优化和调试信息生成等。
- 运行RTW并生成代码,同时解决可能产生的任何编译警告或错误。
通过以下示例代码,我们可以看到RTW生成代码的一个简单例子:
/* Real-Time model "RealTimeModel" */
#include "rtwtypes.h"
#include "RealTimeModel.h"
real_T rtU_In1; /* '<Root>/In1' */
real_T rtY_Out1; /* '<Root>/Out1' */
real_T rtB_jk; /* '<Root>/JK Integrator' */
real_T rtBprecedingJm; /* '<Root>/Preceding Jm' */
void RealTimeModel_step0(void)
{
/* '<Root>/Integrator1' */
rtB_jk += rtU_In1;
/* '<Root>/Saturation' */
if (rtB_jk > 2.0) {
rtB_jk = 2.0;
} else if (rtB_jk < -2.0) {
rtB_jk = -2.0;
}
/* '<Root>/Out1' */
rtY_Out1 = rtB_jk;
}
real_T rtDWork;
在这个简单的例子中, RealTimeModel_step0 函数演示了如何在一个Simulink模型中实现一个积分器的步骤函数。
6.2.2 RTW在仿真中的优势与挑战
RTW在仿真中具有许多优势,例如:
- 快速原型开发 :RTW能够快速将设计转换为可执行代码,加速产品开发周期。
- 目标硬件适配性 :支持多种硬件平台,包括PC、微控制器和FPGA,扩大了Simulink应用范围。
- 与现有工具链集成 :能够与各种外部代码和设备集成,适用于多种应用场景。
然而,RTW也面临着一些挑战:
- 资源限制 :实时系统常常面临有限的计算资源,如CPU速度和内存容量,这要求开发者进行有效的资源优化。
- 系统集成 :与现有系统集成可能会遇到兼容性问题,需要开发者有一定的调试和问题解决能力。
通过合理的配置和优化,RTW可以成为提升Simulink模型实时仿真效率和质量的强大工具。
简介:在MATLAB环境中,GUI与Simulink分别用于交互式编程和系统级仿真。本博客相关文件详细探讨了如何在两者之间进行数据传输,以实现灵活的工程应用。通过具体的实例,如 SineFunc.fig GUI文件和 SineDisplay.slx Simulink模型,展示了如何使用回调函数和MATLAB函数块实现GUI参数与Simulink模型之间的实时交互,并强调了这种技术对于提高仿真工作效率的重要性。

















 8318
8318

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









