






 本文提出了一种基于室内三维点云与BIM集成的建筑施工进度监测方法。通过BIM数据解析、点云与BIM数据配准、BIM部件参数提取与点云化、三维点云变化检测,实现对建筑物门窗部件施工进度的自动化监测。实验表明,该方法可实现高精度的施工进度核查,为建筑施工管理提供有效支持。
本文提出了一种基于室内三维点云与BIM集成的建筑施工进度监测方法。通过BIM数据解析、点云与BIM数据配准、BIM部件参数提取与点云化、三维点云变化检测,实现对建筑物门窗部件施工进度的自动化监测。实验表明,该方法可实现高精度的施工进度核查,为建筑施工管理提供有效支持。
作 者 信 息
刘莎莎1,朱 庆1,汤圣君2,丁雨淋1
(1.西南交通大学 地球科学与环境工程学院,四川 成都 611756;2.深圳大学 建筑与城市规划学院智慧城市研究院,广东 深圳 518061)
“【摘要】施工阶段是建筑生命周期的重要阶段,施工进度如果存在拖延会影响整个建筑工程项目的完成。传统的施工进度监测主要依靠人工方式进行实地检查记录,而项目施工现场的数据丰富,信息量大,只依靠人手工采集耗时耗力。因此提出一种室内三维点云与BIM集成的建筑施工进度监测方法。该方法首先通过BIM数据解析将BIM模型转化为三角网表达;其次手动选取BIM模型与三维点云间匹配点,采用最小二乘优化方法计算三维变换矩阵,实现两者的精确配准与融合;根据BIM组件语义进行门窗部件筛选并提取部件轮廓信息并填充均匀点云,最后采用三维点云变化检测方法对门窗部件的施工进度进行核查。以Revit数据与GeoSLAM系统采集的三维点云作为数据来源,对该方法进行了实验验证,实验结果显示该方法可实现建筑施工进度半自动核查。
【关键词】BIM;三维点云;数据配准;施工进度监测
【中图分类号】TU198+.6 【文献标识码】A 【文章编号】1672-1586(2019)05-0107-06
”引文格式:刘莎莎,朱 庆,汤圣君,等. 室内三维点云与BIM集成的建筑施工进度监测方法[J].地理信息世界,2019,26(5):107-112.
正文
0 引 言
随着城市化进程的不断加快,建筑业得到了快速发展,为了满足社会的需求,建筑工程规模不断扩大,建筑结构形式也日益多样化,这使得依赖于传统手工方式的建筑施工进度监测方法越来越不适用,亟需寻求一种新的施工进度监测方法。
BIM技术因其信息完备性、信息关联性、信息一致性、可视化、协调性等特点,使得参与各方能实时了解项目现状,并且及时发现和解决问题,真正实现协同工作及信息共享,是实现建筑工程施工进度自动化监测的强大技术支撑。然而,建筑施工阶段是一个高度复杂的动态过程,施工现场数据种类繁多,信息量大,信息变化快,BIM模型往往容易脱离现场情况,如何更好地将BIM应用在建筑施工进度监测,就需要借助其他技术手段来进行辅助。如利用三维激光扫描和全景扫描技术获取施工现场的数据,来建立BIM模型和施工现场的纽带。
BIM可以提供精细的三维建筑模型,并与施工进度计划相结合得到建筑物计划进度的BIM模型,而激光扫描方式获取的点云数据可以反映建筑施工现场真实情况即建筑实际施工状态,通过两类数据的匹配分析可以检测出建筑施工过程进度的偏差。
研究一种点云数据与BIM集成的建筑施工进度监测方法不仅便于建筑工程管理者掌握施工情况,也对实现建筑全生命周期管理具有重要的现实意义。本文拟基于点云数据与BIM集成的方法,突破数据转换、关键建筑部件提取等技术难题,实现对建筑物施工过程中门窗等部件的进度监测。首先对本文的研究背景以及国内外研究现状进行了描述;并描述了点云与BIM集成的施工进度监测方法,该方法包括BIM数据解析与转换、三维点云与BIM数据配准、BIM部件参数提取与点云化和三维点云变化检测与施工进度核查四部分内容,基于该方法在BIM模型与三维点云数据的精确配准的基础上,可实现门窗部件施工进度核查;采用Revit模型与三维点云为数据基础,对本文提出的方法进行了实验验证;最后进行总结。
1 国内外研究现状
传统的施工进度监测主要依靠人工方式进行实地检查记录,而项目施工现场的数据丰富,信息量大,只依靠人手工采集耗时耗力。因此,许多研究学者和业界人员从现场数据采集技术下手,试图通过更高效的现场数据采集方法来提高施工进度监测效率。目前,对建筑物施工进度自动化监测的研究按照现场数据采集方式的不同主要分为以下三类:一是利用施工现场影像和视频数据,Saad和Hancher设计了一个多媒体系统Project Navigator,利用动态捕捉影像的方式跟踪项目进度同时记录下项目中经验总结以便分享后来接收的人员,该方法只是通过影像获取进度数据,无法从三维上判断工程施工情况;二是使用无线射频识别(Radio Frequency Identification,RFID)技术获取构件的进度信息,该方法要求构件本身附着有RFID标签,需要在建筑施工环境中进行硬件布设,成本和复杂性高;三是使用3D激光扫描技术来动态采集施工进度数据,Bosche提出基于改进的迭代最近点(Iterative Closest Point,ICP)算法,可以从3D激光扫描数据中有效识别出3D CAD建筑模型构件,用于自动化施工进度跟踪,该方法体现了利用三维点云数据实现建筑施工进度自动化监测的可行性。
随着BIM技术应用逐渐向建筑全生命周期的4个阶段(即规划阶段、设计阶段、施工阶段、运维阶段)发展,BIM在施工阶段的应用也在不断深化。Ali Murant Tanyer,Ghassan Aouad等人基于IFC标准设计开发了4D进度模拟软件,支持用户根据建立的4D BIM模型快速做出施工预算;Wang J等人将BIM和LiDAR技术动态结合,实现了建筑物施工现场数据实时采集和施工质量控制;Qu T等人融合了低空无人机倾斜摄影技术和BIM技术,通过模型比对来动态监控建筑工地进度;Tuttas S等则对比了手持摄影机、无人机摄影和起重臂固定相机3种信息采集方式重建的施工现场三维模型与BIM设计模型,来分析建筑工程施工实际状态与计划状态的差异。然而相比较国外成熟丰富的研究,国内对BIM在施工进度方面的相关研究就相对较少,且理论研究多于应用研究,应用研究也大多为模拟展示施工建造过程。李勇通过对进度复杂影响因素的概率统计分析,构建施工进度复杂因素的预测模型,提出了基于BIM技术的进度预测集成系统。但其注重于通过分析施工进度复杂影响因素,来对实际工程进度进行预测,并不能获得准确、实时的施工进度信息。
综上,针对现有的施工监测方法存在的不足,本文充分考虑BIM和点云数据各自的优势,提出一种室内三维点云与BIM集成的建筑施工进度监测方法,以实现对建筑物门窗等部件施工进度的快速、自动化监测。
2 点云数据与BIM集成的施工进度监测
施工进度监测可通过比较当前施工现场三维场景与施工前的设计模型之间的差异获得,其中当前施工现场三维场景可采用倾斜摄影测量或者激光扫描的方式获取,设计模型为BIM模型。
1)两种数据的配准融合是实现施工进度监测的前提条件。考虑到三维点云数据与BIM模型的几何表达存在显著不同,需要将原始BIM模型数据转换成可以读取顶点坐标信息的数据结构,进而选取BIM模型与三维点云中的同名点,采用最小二乘计算方法获取两种模型间的旋转与平移变换关系,该变换关系可用于BIM模型与三维点云的高精度配准。
2)经过数据配准后,BIM模型与点云数据位于同一坐标体系,可用于施工进度监测。
室内空间中,当前主要考虑门窗部件的施工进度监测:首先对BIM模型中门窗部件的参数与坐标信息进行提取并进行点云填充,将BIM模型门窗点云与实际三维点云进行变化检测,可获取到已构建及未构建门窗部件并进行标记。因此实现点云与BIM集成的施工进度监测包含BIM数据解析与转化、三维点云与BIM数据配准、BIM部件参数提取、三维点云变化监测与进度检查4个步骤。
2.1 BIM数据解析与转化
BIM模型通常采用体结构表示,不包含真实的地理坐标,需要将原始BIM模型数据转换成可以读取顶点坐标信息的数据格式,如三角网或者三维点云,一方面可用于BIM部件参数提取,另一方面可用于三维点云与BIM模型的配准融合。本文中采用典型BIM数据格式Revit格式,该模型包含了丰富的几何信息与语义信息,根据施工检查需要,在BIM数据解析过程中根据进度核查需要仅需保留部件的类型信息以及几何信息。具体包括Revit坐标系解析以及几何信息转换两个步骤。
2.1.1 Revit坐标系解析
Revit模型中存储的是各个对象间的相对位置关系,在涉及到几何和位置关系的二次开发时,多是进行族坐标系和模型坐标系间的坐标。
Revit里包含了4种坐标系:①模型坐标系:也称全局坐标系;②视图坐标系;③族坐标系:当族文件插入到模型中时,其中的几何体会产生本身在模型中的位置使其具有自己的坐标,因此为了得到族在全局坐标系中实际位置,就需要与模型坐标系进行坐标转换;④链接模型坐标系:通过共享坐标系来链接两个模型,需要进行坐标转换来获取链接模型在主体模型中的位置。
2.1.2 几何信息转换
在Revit中,RVT模型中的所有元素都存储在Document对象中,通过遍历Element便可以获取到整个RVT模型的几何信息,GeometryObject是所有几何类的基类,因此根据需求选择其派生类Solid、GeometryInstance来读取几何信息。具体流程如下:
1)根据语义信息筛选RVT模型需要输出的构件类别;
2 ) 获取每个E l e m e n t 所包含的几何图元(GeometryObject)。方法是针对每个构件类别分别构建过滤器,本文中过滤器主要包含墙面、地板、门、窗部件,遍历其所包含的所有Element对象,找到不为空的几何表示,即得到该Element对象的所有几何图元;
3)获取三角网顶点坐标并记录组件类型,直至遍历所有的Element对象;
4)通过计算三角面片两条边向量的叉积,可以得到该三角面片法线向量;
5)几何信息与材质信息、属性信息的关联。在RVT模型中,每个Element都有唯一的ID标识,存储属性信息时将其作为关键字与几何信息关联起来。
2.2 三维点云与BIM数据配准
三维点云与BIM模型配准是实现施工进度核查的前提。经过BIM数据解析后,Revit模型可采用三角网或者三维点云方式进行表达,可以准确获取模型内部顶点的三维坐标。同时三维点云数据具有与BIM模型共有特征,可获取到BIM模型中同一区域特征匹配点,基于该匹配点可计算BIM模型与三维点云间的变换矩阵,实现三维点云与BIM数据精确配准。具体流程如图1所示,分别从三角化后的Revit模型中与室内三维点云数据中选取不少于5对特征匹配点,考虑到手动选取误差,采用最小二乘计算方法获取两者之间的最优三维变换矩阵,进而实现两者精确配准。
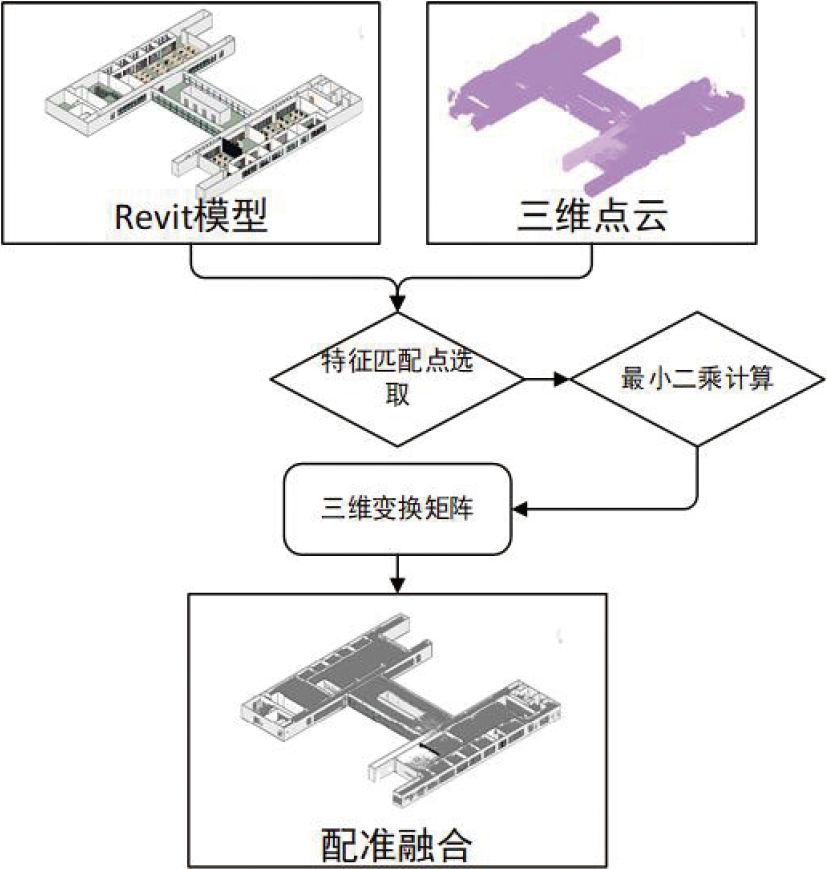
图 1 三维点云与BIM数据配准
Fig.1 Co-registration of 3D point cloud and BIM
假定Revit模型中获取点集Pr={pr 1,pr 2,pr3,pr4,pr5,…,prn },三维点云数据中获取点集Pc ={pc1,pc2 ,pc3 ,pc4 ,pc5,…,pcn},BIM模型坐标系Wr与三维点云数据坐标系Wc之间的存在坐标变换关系T,且T×Pr =Pc,根据最小二乘原理,变换关系T 可通过最小化匹配点三维残差的方式获取,如公式(1)所示。

2.3 BIM部件参数提取与点云化
BIM部件参数提取是进行施工进度核查的前提,本文中采用BIM部件点云化的方式对BIM部件进行描述,进而可通过三维点云变化检测的方式该部件施工进度信息。具体流程如图2所示。
1)将经过数据解析后的Revit模型进行部件信息迭代,获取部件类型信息,判断是否为门窗部件;
2)若为门窗部件,则加入组件池,直至获取到所有门窗部件;
3)获取门窗部件的外轮廓,并通过均匀点云对部件闭合轮廓进行填充实现BIM模型门窗部件三维点云表达。
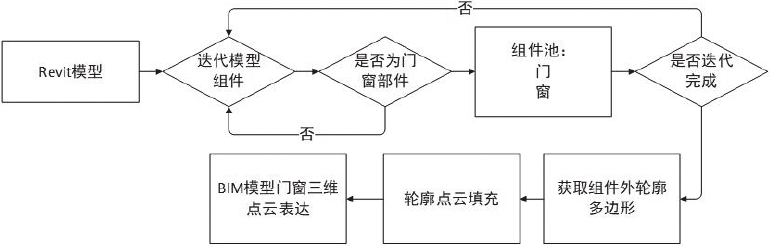
图 2 BIM部件参数提取与点云化
Fig.2 Extraction of BIM element and point cloud filling
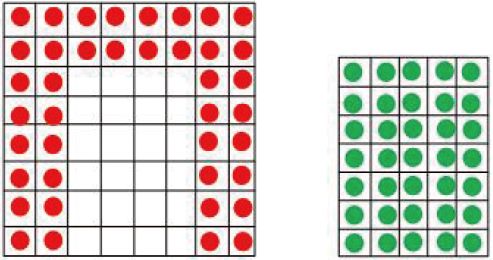
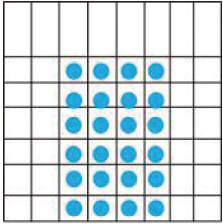
图3中展示了部件参数提取与点云化表达示例,图3a中为原始的BIM模型,包含所有的部件信息,如门窗、墙面、桌椅等。图3b中通过语义信息过滤的方式获取所有的门部件,并且获取门部件轮廓信息,进而通过点云填充方式获取门部件的点云化表达,如图3c中所示。
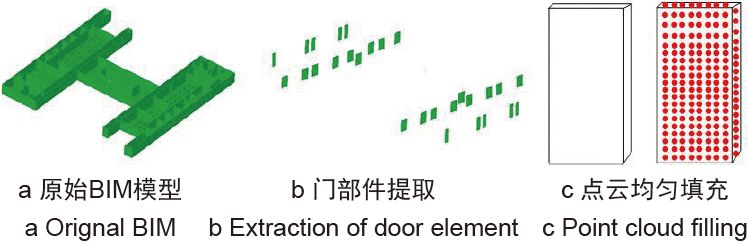
图3 部件参数提取与点云化表达示例
Fig.3 Example of the extraction of BIM element and point cloud filling
2.4 三维点云变化检测与施工进度核查
将获取的部件三维点云与原始三维点云数据进行变化检测即可获取部件与原始点云间的重叠度,根据设定的重叠度阈值即可判定该组件是否已经建造。如图4所示,为三维点云变化监测与施工进度核查方法流程。
a 原始三维点云
a Orignal 3D point cloud
b 点云OCTREE结构
b Octree of point cloud
c 点云与OCTREE叠加
c Point cloud with octree cell
d 变化检测
d Change detection
图4 三维点云变化检测与施工进度核查流程
Fig.4 Procedure for 3D point cloud change detection and construction progress checking
其核心是:
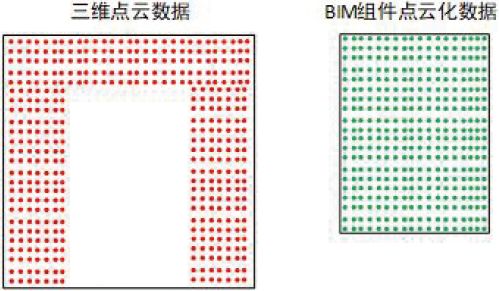
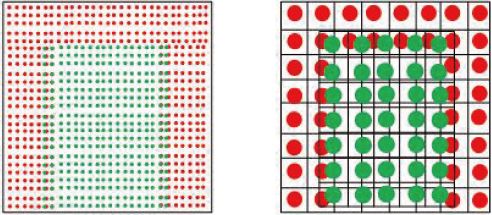
1)考虑到点云可能在尺寸、分辨率、密度和点顺序等方面有所差异,难以直接进行变化检测,而Octree是一种用于管理稀疏3D数据的树状数据结构,八叉树结构通过对三维空间的几何实体进行体元剖分,每个体元具有相同的时间和空间复杂度,通过循环递归的划分方法对大小为(2n×2n×2n)(2n×2n×2n)的三维空间的几何对象进行剖分,从而构成一个具有根节点的方向图。在八叉树结构中如果被划分的体元具有相同的属性,则该体元构成一个叶节点;否则继续对该体元剖分成8个子立方体,依次递剖分,对于(2n ×2n ×2n )(2n×2n×2n)大小的空间对象,最多剖分n×n次。为此Octree结构可以很好地对不同分辨率和密度的三维点云进行重采样统一分辨率,并用于变化检测。为此首先需要将原始点云数据与点云化后的组件模型构建Octree结构,分别记为 ,
, 。
。
2)通过递归比较Octree 的树结构,可以鉴定出由Octree产生的体素组成之间的区别所代表的空间变化,如图4d所示,经过变化检测后,蓝色点代表原始点云数据中没有的体素,即BIM组件点云中存在而原始点云数据中不存在的体素,记为 。
。
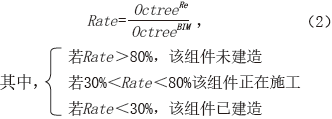
3)假设核查阈值为80%,当变化体素与BIM组件体素个数比值Rate 大于80%时,表示该组件未建造;当变化体素与BIM组件体素个数比值Rate大于30%且小于80%时,表示该组件正在施工;当变化体素与BIM组件体素个数比值Rate 小于30%时,表示该组件已建造。可通过公式(2)表示。通过迭代判断即可获取所有门窗部件的施工进度信息。
3 实验与分析
3.1 实验环境
本文实验分为两部分,第一部分是BIM模型三角化,利用Revit SDK进行插件开发,实现BIM数据解析与转化,在Autodesk Revit Architucture中使用插件得到由BIM模型转换得到的三角网模型;第二部分是基于Point Cloud Library和OpenCV开源库在Microsoft Visual Studio 2013平台开发实现数据配准、三维点云变化检测算法,从而获得室内部件施工进度情况。
3.2 实验结果与分析
本实验采用深圳大学科技楼9层BIM数据与GeoSLAM系统获取的三维点云数据作为原始数据。如图5所示,左图为BIM 原始数据,其中包含墙、地板、门、窗、室内装饰部件等;右图为高精度三维点云数据,可达到厘米级精度,可满足施工进度核查需求。
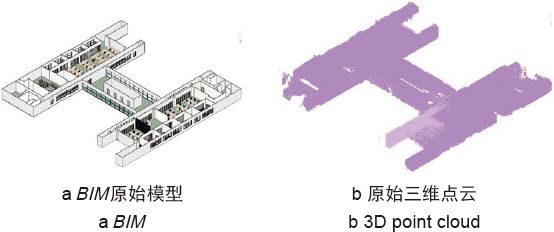
图5 实验数据
Fig.5 Experimental samples
基于以上方法,实验结果如图6所示,可看出经过模型解析-点云与BIM 模型配准融合-部件提取-点云变化检测后可获取到已施工与未施工的门窗部件。图6a显示了经过BIM 模型解析与几何转换后的建筑物模型,可通过三角网方式进行表达。图6b显示了基于手动选取的特征匹配点,采用最小二乘优化获取三维变换矩阵,三维点云与BIM数据配准融合后的模型。可见该方法可以实现BIM模型与三维点云的高精度匹配,可满足后期施工进度监测需求。图6c为经过门窗部件筛选和提取获取的门窗部件模型,通过语义筛选的方式可获取到BIM模型中的所有门窗部件,图6d为三维点云与门窗部件叠加显示,进而用于门窗部件施工进度监测。最后通过部件点云化与三维变化检测方法,计算每个门窗部件与三维点云局部区域的重叠度,变化检测后获取的点云与部件点云比率高于80%;则该部件未建造,比率低于30%,则该部件已建造;比率低于80%且高于30%,则部件正在施工。实际场景中,门窗部件仅需分为已建造和未建造两类,图6e和图6f为经过施工监测后已施工门窗部件和未施工门窗部件。表1显示了门窗部件施工进度识别精度,其中门部件实际个数为41个,错误识别2个,总体识别精度为95.12%;窗部件实际个数为95个,错误识别个数为6个,识别精度为93.68%。
表1 门窗部件施工进度识别精度
Tab.1 Progress examination accuracy of the door and window
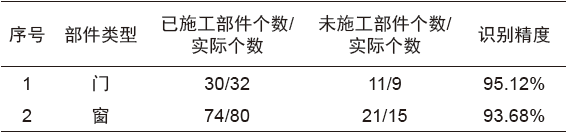
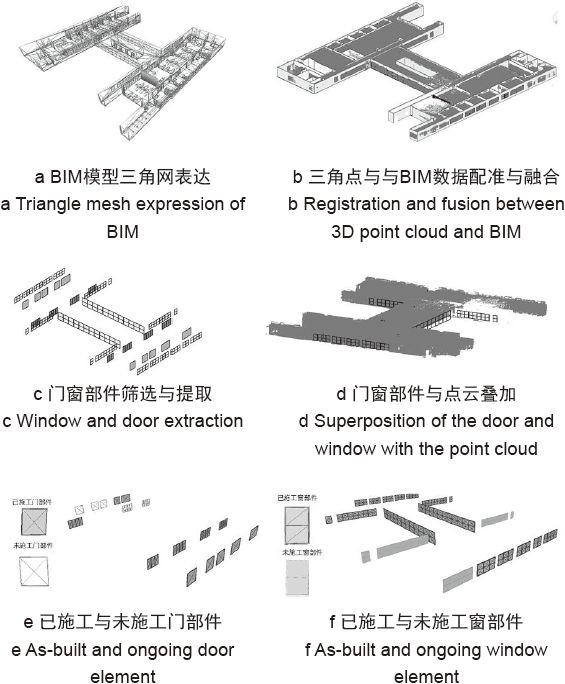
图6 实验结果
Fig.6 Results of the experiment
4 结束语
本文实现了基于室内三维点云与BIM模型的建筑施工进度监测方法,初步探讨了室内三维点云与BIM数据配准与融合、点云与BIM集成的施工进度监测方法的整体流程和思路。具体是首先通过BIM数据解析将BIM模型转化为三角网表达;其次基于获取的特征匹配点,采用最小二乘优化方法计算三维变换矩阵,实现BIM模型与三维点云数据的精确配准;根据BIM组件语义进行门窗部件筛选并提取部件轮廓信息并填充均匀点云,最后采用三维点云变化检测方法对门窗部件的施工进度进行核查。最后采用以Revit数据与GeoSLAM系统采集的三维点云作为数据来源,对该方法进行了实验验证,实验结果显示该方法可实现门窗部件施工进度核查,精度可达90%以上。本文提供的施工进度检查思路和方法可为BIM与三维点云数据集成融合提供重要借鉴。
本期回顾
文化遗产数字化修复
· 机载LiDAR点云建筑物屋顶轮廓线自动提取研究综述
· 融合多特征的兵马俑碎片分类技术研究
· 基于高光谱影像的瞿昙寺壁画颜料层脱落病害评估
理论研究
· 兼顾非期望产出的工业用地效率测度、分异与溯因 ——以东北三省为例
· 基于模体的化石能源贸易网络特征分析
· 基于自编码网络的移动轨迹异常检测
· 基于同质区和迁移学习的高光谱图像半监督分类
· SSW系统在地下大型停车场三维建模中的应用研究
· 顾及上下文信息的城区机载LiDAR建筑物自动化提取方法研究
创新应用
· 新世纪版《国家普通地图集》数学基础的系统化构建与可视化研究
· 一种融合多维信息的城市建成区提取方法
· 基于LSTM的城市道路交通速度预测
· 基于Lego机器人的低成本SLAM方法设计
· 基于时间序列的网格化城市管理案件预测模型研究
技术探讨
· 基于消费级无人机的地质露头三维建模技术研究
· 顾及轮廓特征的建筑物对象级三维变化检测方法
邮箱变更声明
·《地理信息世界》邮箱变更声明
网站开通公告
·关于开通《地理信息世界》网站的公告
诚聘特约审稿专家
·诚聘|《地理信息世界》诚聘特约审稿专家
专题组稿
·约稿函|《地理信息世界》关于开辟“博士综述论坛”专栏的约稿函

















 1054
1054

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









