







 本文介绍了如何在Robotstudio中利用Halcon机器视觉软件进行机器人位姿引导的虚拟仿真。通过创建机器人与视觉系统,添加工件坐标系,声明机器人位置变量,创建Smart组件来接收并发送视觉数据,以及编写示教程序,最终实现机器人根据视觉引导进行精准操作。
本文介绍了如何在Robotstudio中利用Halcon机器视觉软件进行机器人位姿引导的虚拟仿真。通过创建机器人与视觉系统,添加工件坐标系,声明机器人位置变量,创建Smart组件来接收并发送视觉数据,以及编写示教程序,最终实现机器人根据视觉引导进行精准操作。
概述
近几年来机器视觉技术在工业生产中得到了广泛的应用,在工业机器人应用领域中,机器视觉被广泛应用于工件的特征检测,以及机器人的位姿引导。市面上大部分的机器人厂商也都在机器人控制器中开放了视觉集成接口,以便于机器人能够直接与智能相机进行数据交互。除了现实的机器视觉应用以外,在机器人仿真过程中也需要对机器视觉进行仿真。本期,就来为大家介绍一下,Robotstudio软件中使用机器视觉实现机器人位姿引导的操作方法。
机器人与视觉系统创建
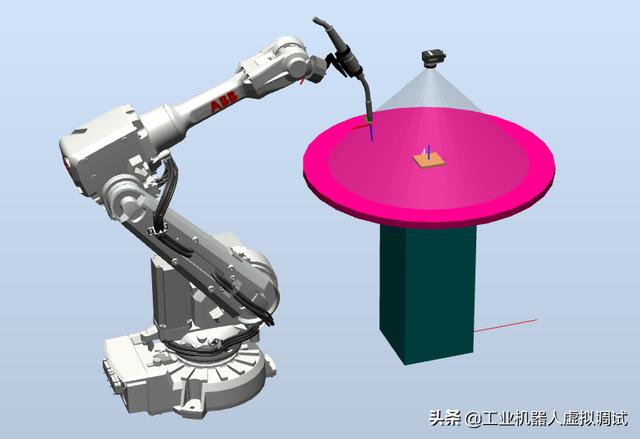
在上一期创建的工件位置随机生成仿真环境中,添加一台IRB2600机器人,机器人工具与相机分别使用Robotstudio软件设备库中自带的焊枪AW_Gun_PSF_25、Integrated Vision camera Cam00X。同时使用“建模”菜单中的“圆锥体”建模工具创建一个圆锥体,并修改圆锥体透明度,作为相机光源。
将焊枪安装到机器人上,相机、相机光源分别放置到合适位置处,并创建机器人控制系统,机器人与视觉系统创建完成后,如下图所示。
机器人工件坐标系添加
对于机器人位置与姿态的视觉引导,大多数品牌的机器人都是基于工件坐标系实现的,ABB机器人也不例外,因此这里也需要添加一个工件坐标系。
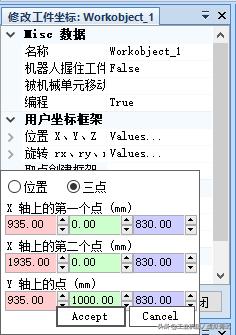
“基本”菜单栏下,“其他”命令按钮的下拉菜单中,点击“创建工件坐标”,在弹出的创建工件坐标中,用户坐标框架下使用“取点创建框架”中的“三点”法,在工作台面中心点位置处,创建一个工件坐标系,坐标轴方向与大地坐标系保持一致。
工件坐标系创建完成后,使用“同步”功能将在仿真环境中创建的工件坐标系以及工具坐标系同步到机器人控制器中,同步时二者所属的模块均选择“Module1”。
机器人位置与姿态变量声明
在Rob
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 3468
3468

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









