






首个用于自动驾驶的基于模型的RL方法
题目:Think2Drive: Efficient Reinforcement Learning by Thinking in Latent World Model for Quasi-Realistic Autonomous Driving (in CARLA-v2)
作者单位:上海交通大学
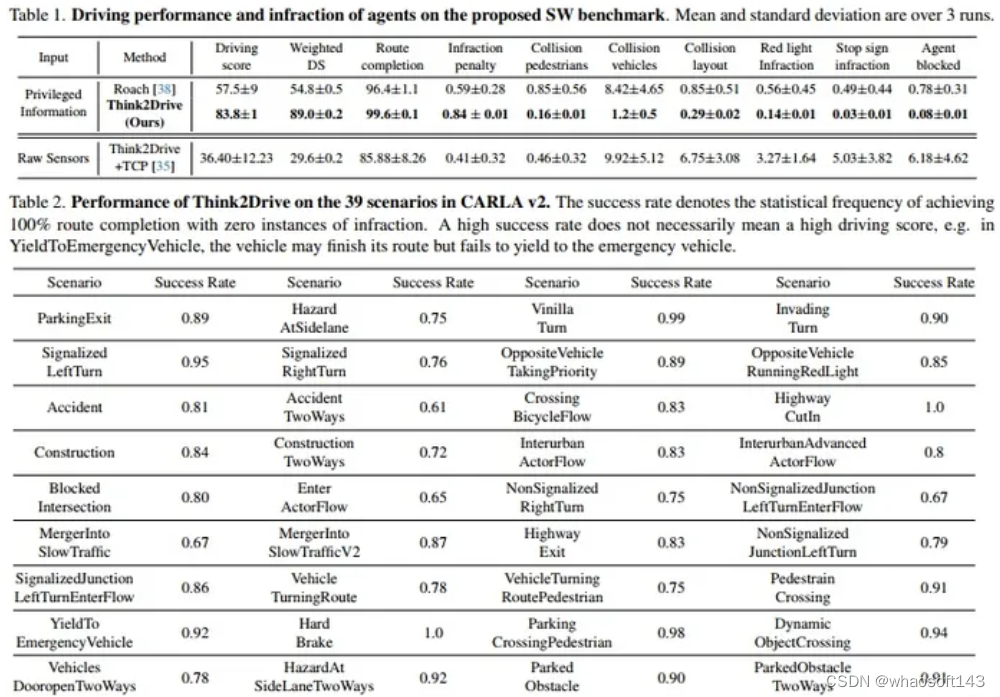
现实世界中的自动驾驶(AD),尤其是城市驾驶,涉及许多corner case。最近发布的AD仿真器CARLA v2在驾驶场景中增加了39个常见事件,并提供了比CARLA v1更接近真实的测试平台。这给社区带来了新的挑战,到目前为止,还没有文献报告CARLA v2中的新场景取得了任何成功,因为现有的工作大多都必须依赖于特定规则进行规划,但它们无法涵盖CARLA v2中更复杂的情况。这项工作主动直接训练一个规划器,希望能够灵活有效地处理corner case,认为这也是AD的未来方向。据我们所知,我们开发了第一个基于模型的强化学习方法,名为Think2Drive,用于AD,具有一个世界模型来学习环境的转变,然后它充当神经仿真器来训练规划器。这种范式极大地提高了训练效率,因为世界模型中的低维状态空间和张量的并行计算。
结果,Think2Drive能够在单个A6000 GPU上进行3天的训练后,在CARLA v2中以专家级的熟练程度运行,据我们所知,迄今为止尚未报告有关CARLA v2的成功(100%的路线完成)。还提出了CornerCase-Repository,这是一个支持通过场景评估驾驶模型的基准。此外,提出了一个新的平衡指标来评估性能,包括路线完成、违规次数和场景密度,以便驾驶分数可以提供更多关于实际驾驶表现的信息。
实验结果















 1317
1317

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









