







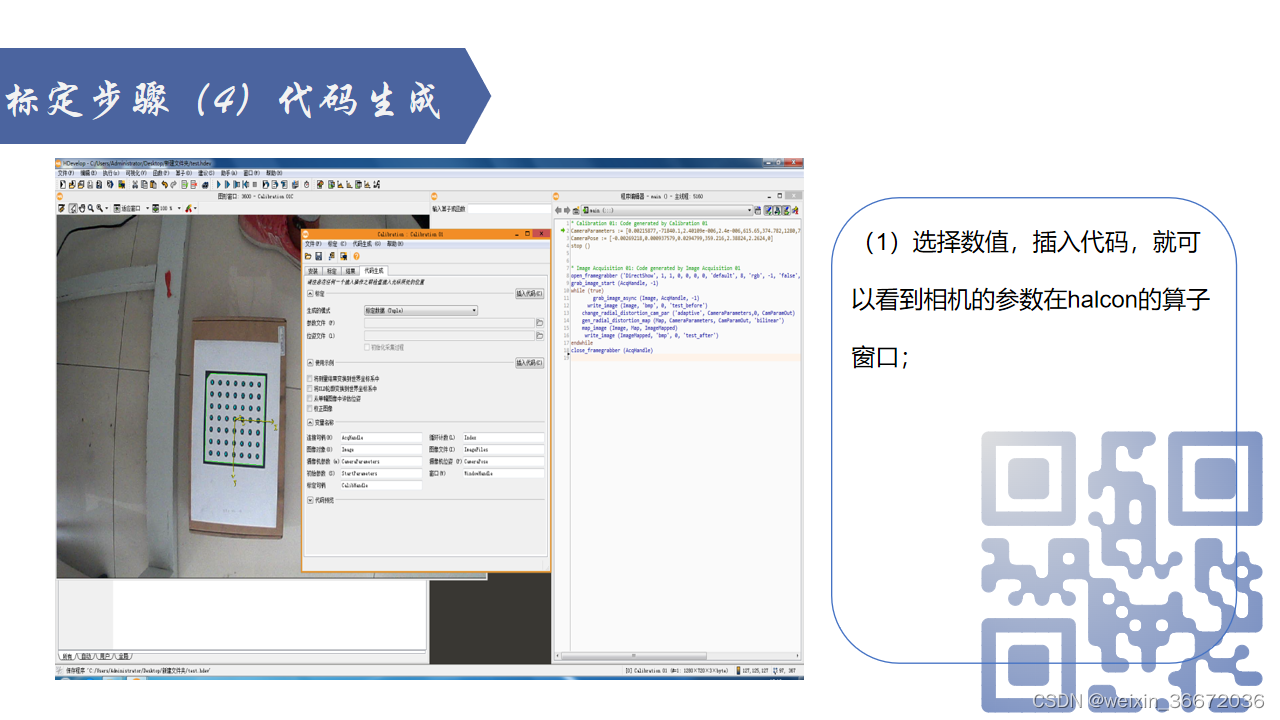
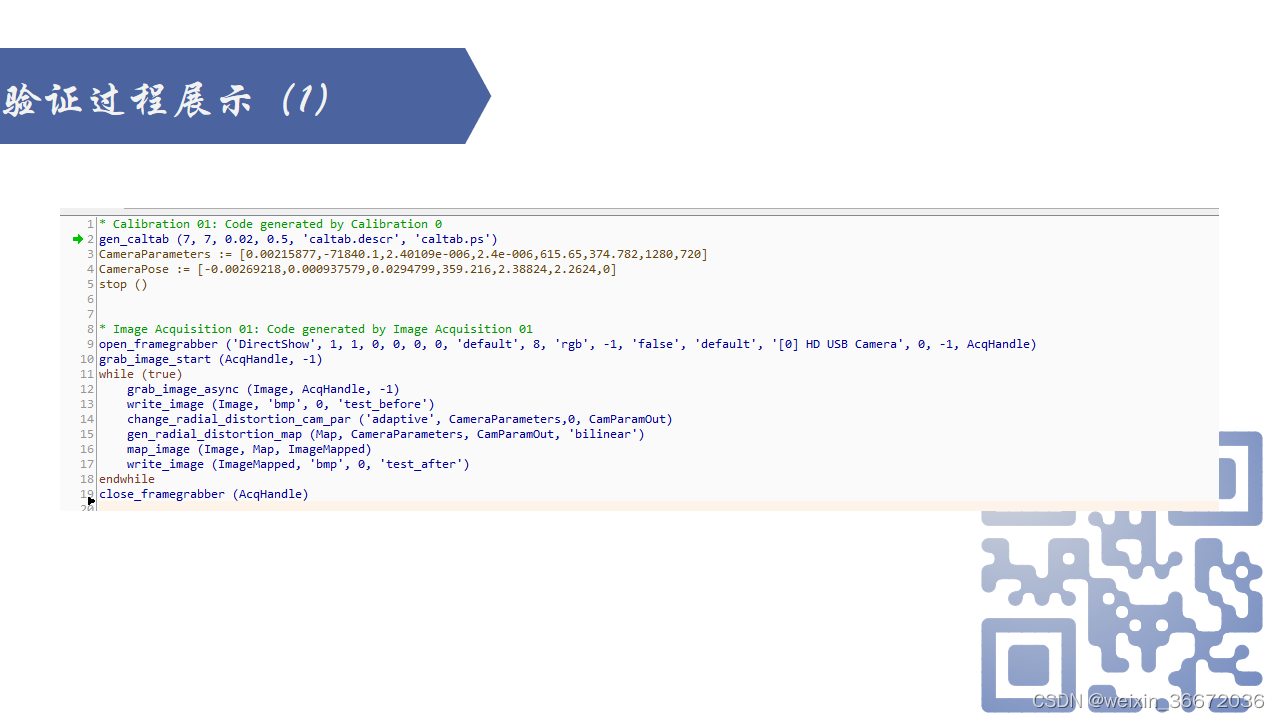
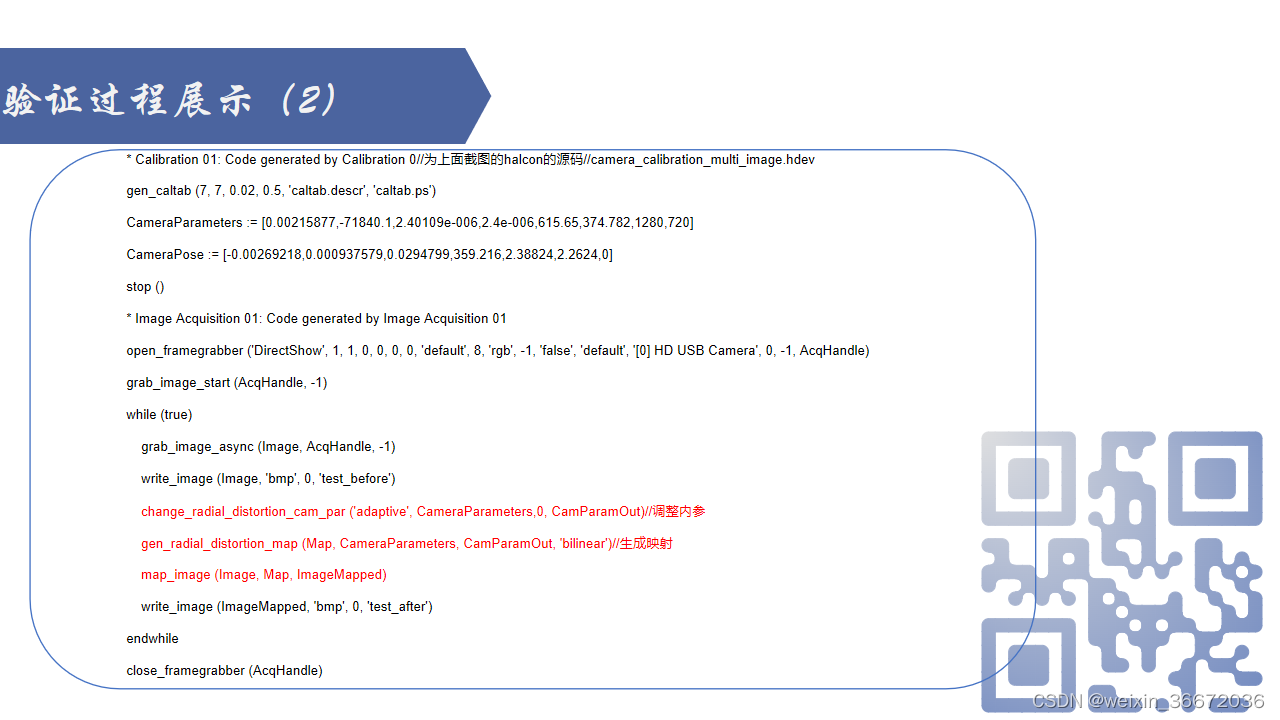
- Calibration 01: Code generated by Calibration 0//为上面截图的halcon的源码//camera_calibration_multi_image.hdev
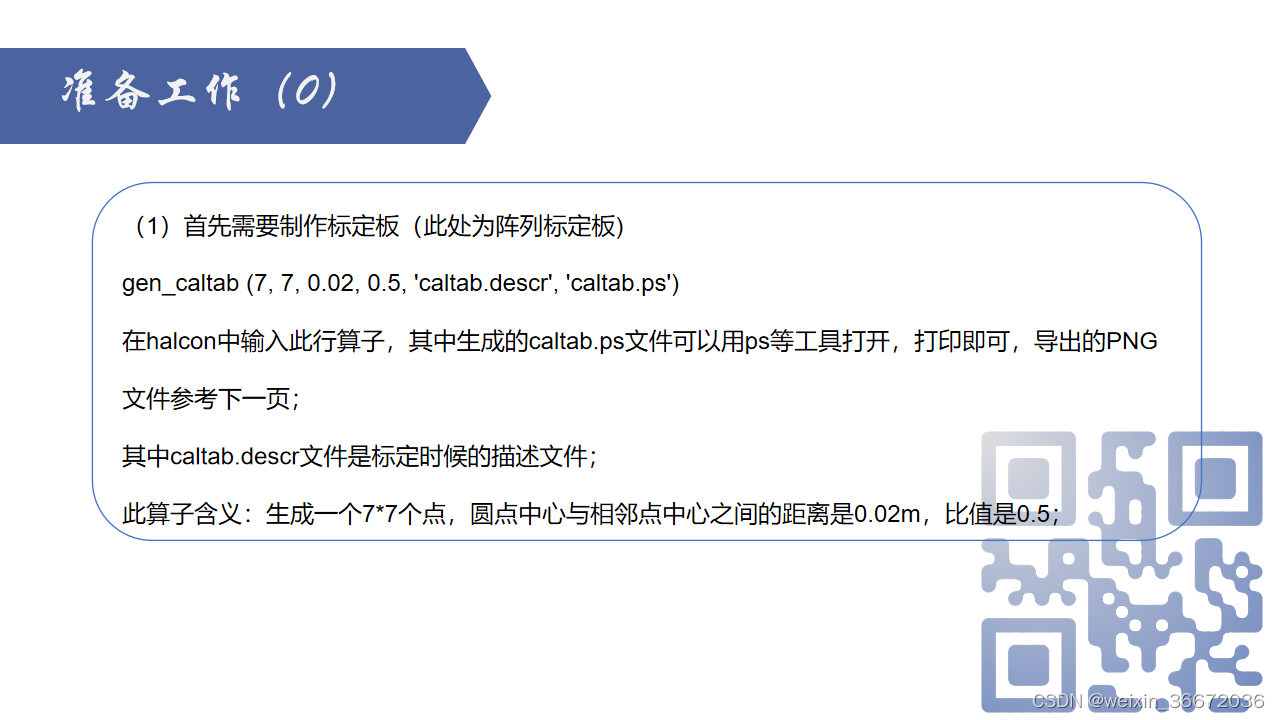
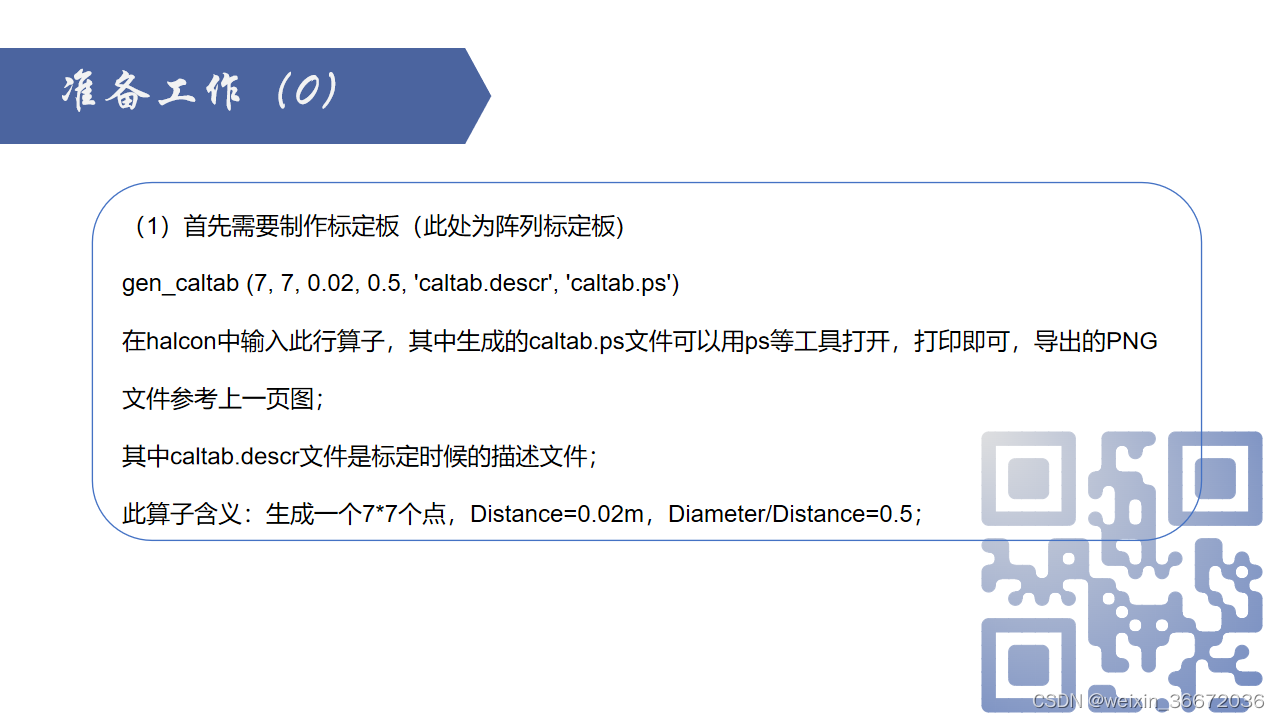
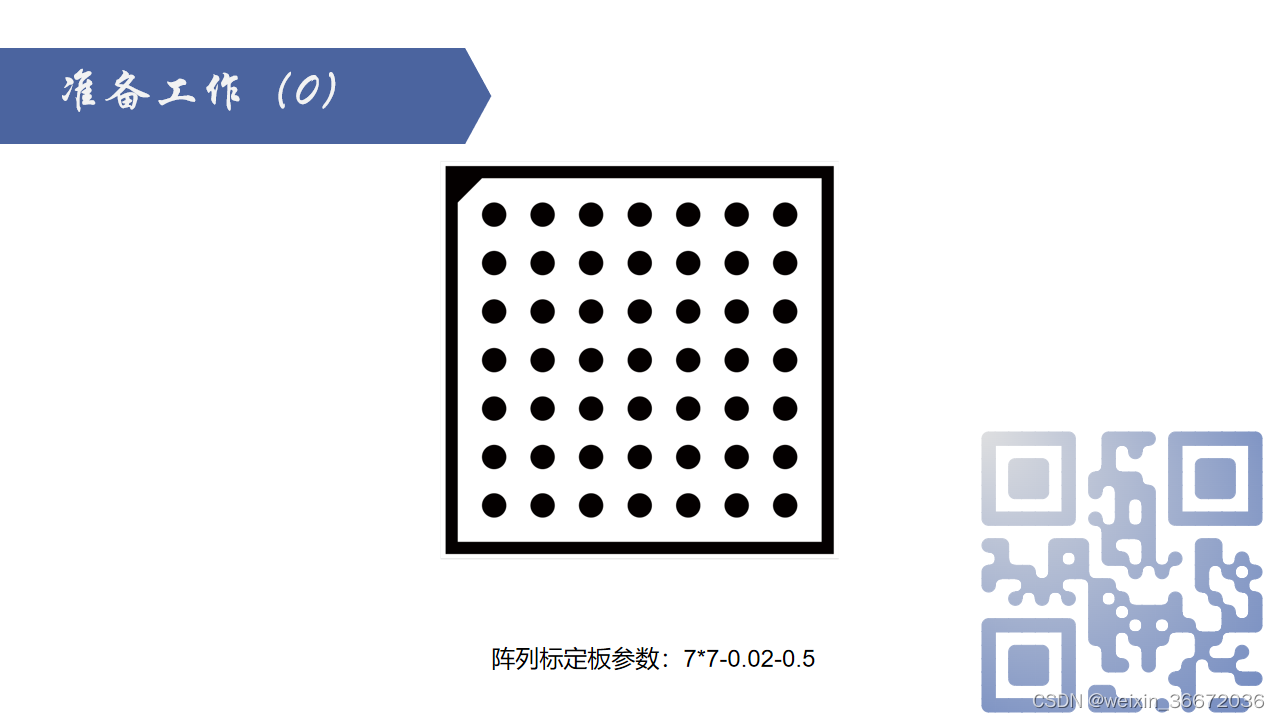
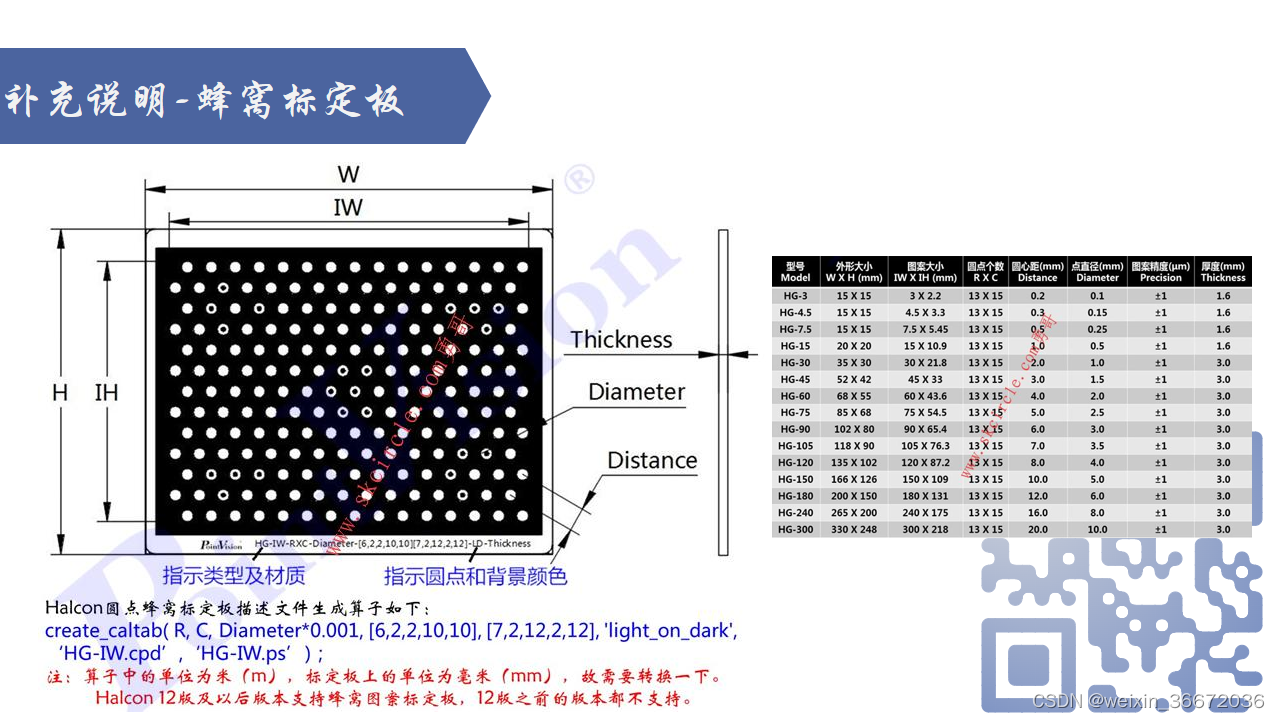
gen_caltab (7, 7, 0.02, 0.5, ‘caltab.descr’, ‘caltab.ps’)
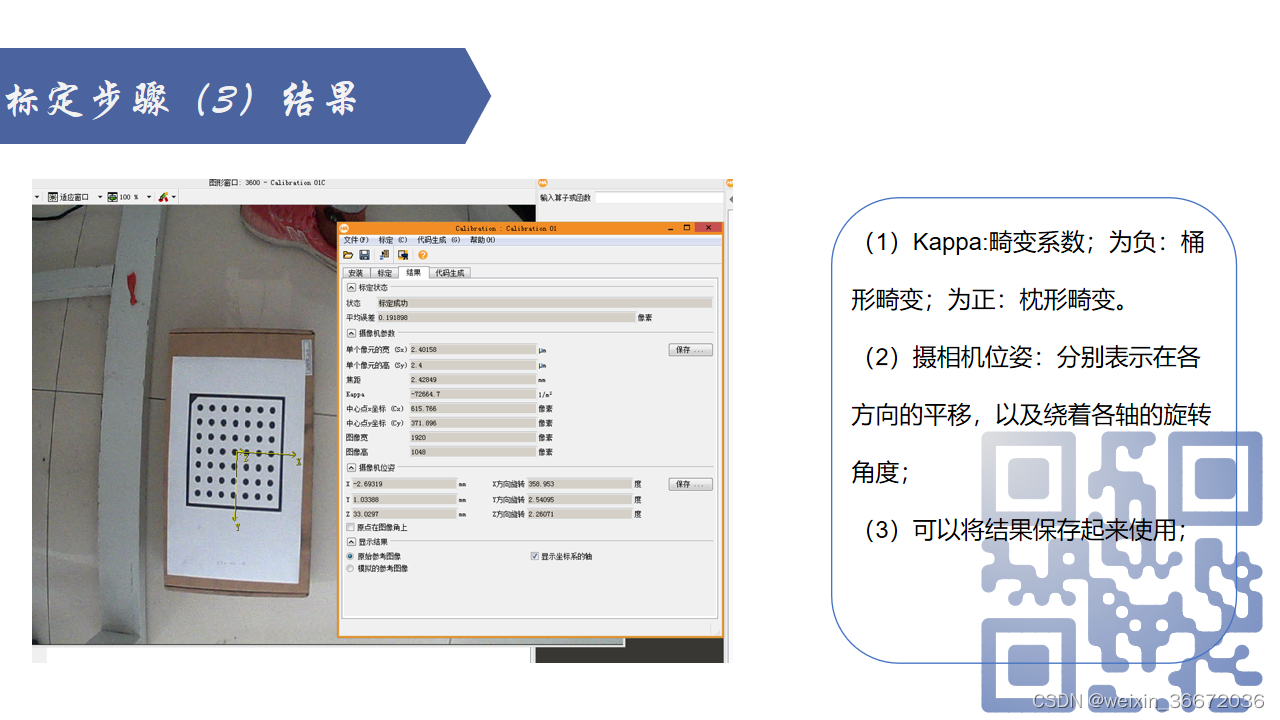
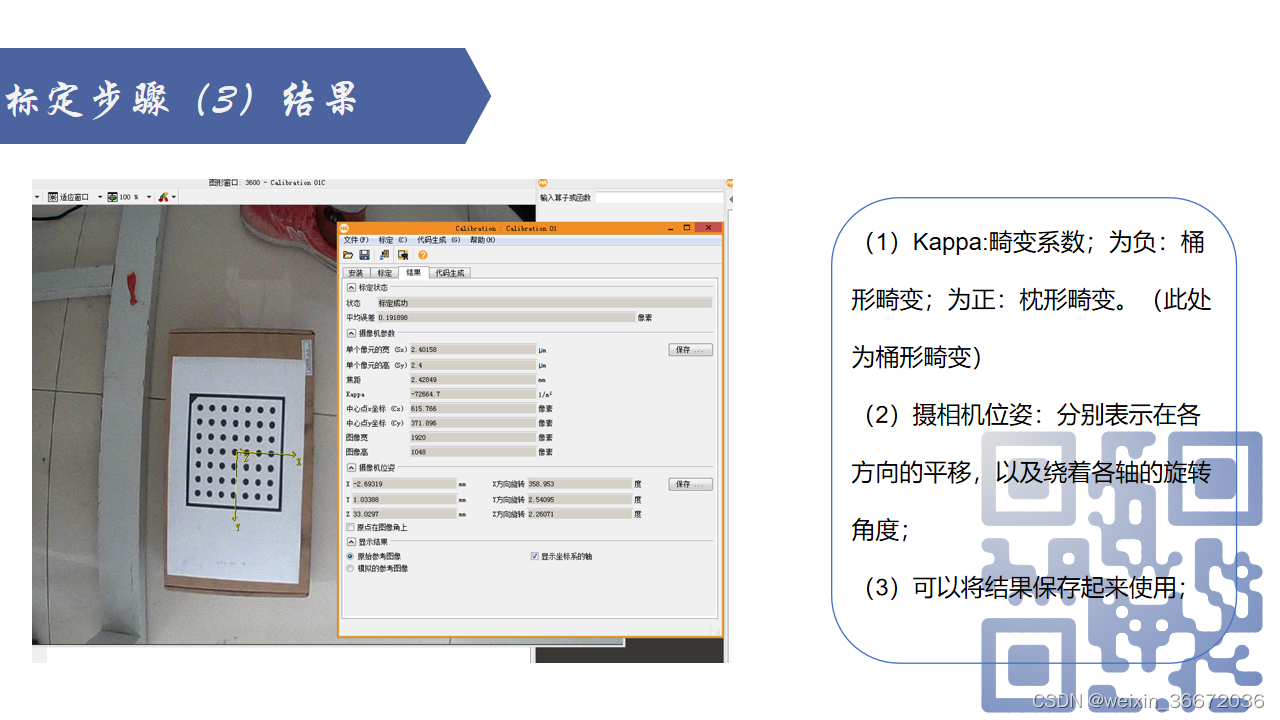
CameraParameters := [0.00215877,-71840.1,2.40109e-006,2.4e-006,615.65,374.782,1280,720]
CameraPose := [-0.00269218,0.000937579,0.0294799,359.216,2.38824,2.2624,0]
stop ()
- Image Acquisition 01: Code generated by Image Acquisition 01
open_framegrabber (‘DirectShow’, 1, 1, 0, 0, 0, 0, ‘default’, 8, ‘rgb’, -1, ‘false’, ‘default’, ‘[0] HD USB Camera’, 0, -1, AcqHandle)
grab_image_start (AcqHandle, -1)
while (true)
grab_image_async (Image, AcqHandle, -1)
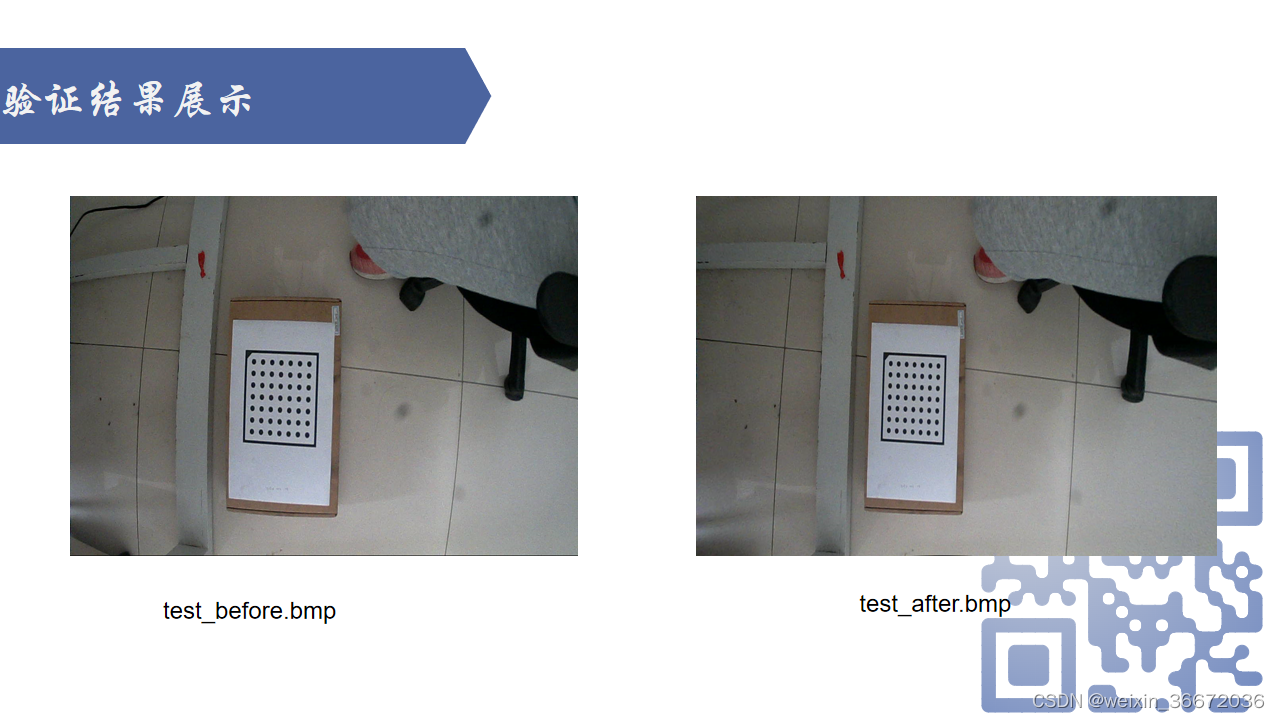
write_image (Image, ‘bmp’, 0, ‘test_before’)
change_radial_distortion_cam_par (‘adaptive’, CameraParameters,0, CamParamOut)//调整内参
gen_radial_distortion_map (Map, CameraParameters, CamParamOut, ‘bilinear’)//生成映射
map_image (Image, Map, ImageMapped)
write_image (ImageMapped, ‘bmp’, 0, ‘test_after’)
endwhile
close_framegrabber (AcqHandle)















 1715
1715











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









