






PID参数调整最近又火了,工业已经玩了30年的PID了,至今还没有玩明白,看来PID有点难度。

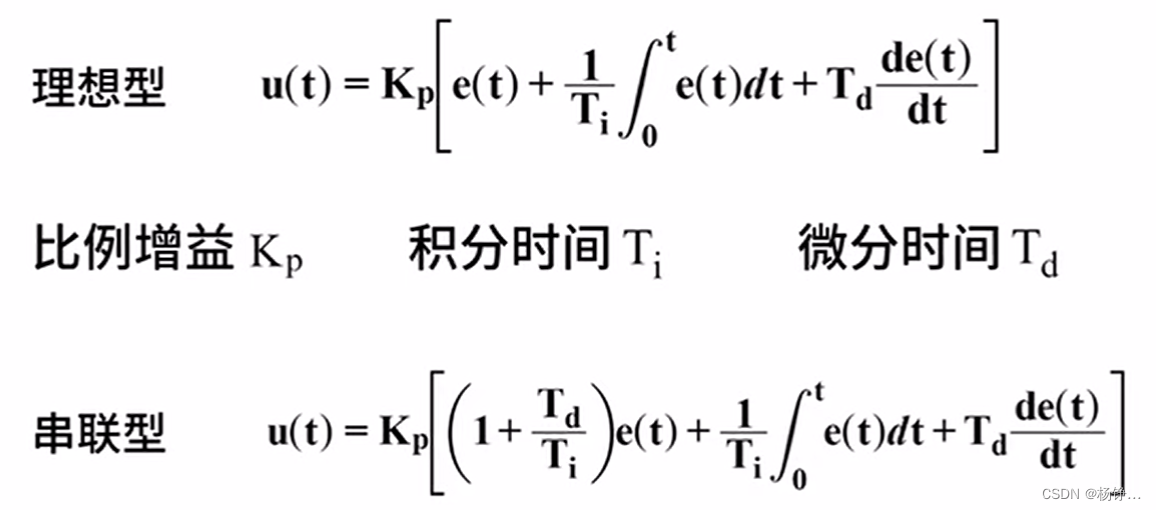
理想型PID参数整定方法:
1、阶跃响应法
2、ZN整定法
3、临界震荡法
4、lambda法
5、试凑法
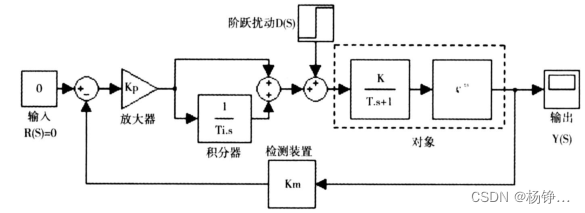
K Y(S)
G(S) = exp(-t*s) * ---------- = -----
T s + 1 X(S)
拐点:速度最快的点,速度变化方向改变的点。
采集数据最好做下滤波后再做切线和交点,数据是开度发生改变时,开始采集的数据,也可以理解为恒定开度下,采集的数据。
阶跃响应法
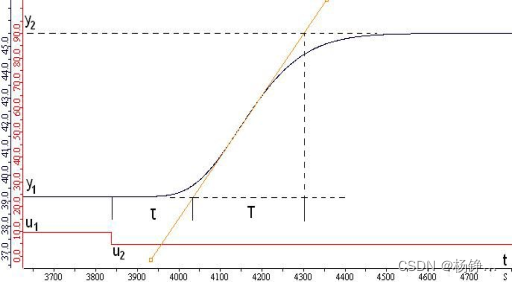
y2-y1
K = ----------
u2-u1
lambda整定法
1、Lambda整定PID参数适用于具有串联或理想形式的PID,但不适用于并行形式(独立增益)PID。
2、Lambda整定方法计算控制器增益(KC),而不是比例度(PB)。PB=100/KC。
3、该方法假定控制器的积分设置为积分时间TI(以分钟为单位),而不是积分增益KI。KI=KC/TI。
被控对象辨识出来后采用MATLAB 得到PID参数


















 3485
3485

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











