







前言
最近接触到OTFS这个技术概念, 于是找到一些相关的paper阅读了一下。 中间涉及许多的数学推导暂时还是一知半解,受限于自身水平,这篇相关的记录博客主要是个人理解,可能有所纰漏,希望大家指出。看了一些相关介绍的Magazine文章,最后发现还是提出者最开始的paper更容易理解,也即本文所围绕的文章: 《Orthogonal Time Frequency Space Modulation》 。总体感受是,对于高移动性场景,对于时变信道,OTFS确实是一种相比于传统OFDM系统更好的通信调制方式。
系统模型
OTFS的核心思想建立于下式之上: 对于系统的输入信号
s
(
t
)
s(t)
s(t),有接收信号:
r
(
t
)
=
∬
h
(
τ
,
ν
)
s
(
t
−
τ
)
e
j
2
π
ν
(
t
−
τ
)
d
ν
d
τ
(1)
r(t)=\iint h(\tau, \nu) s(t-\tau) e^{j 2 \pi \nu(t-\tau)} \mathrm{d} \nu \mathrm{d} \tau \tag{1}
r(t)=∬h(τ,ν)s(t−τ)ej2πν(t−τ)dνdτ(1)
这个式子我是这样理解的, 如果是传统的时域信号模型,此处接收信号应该是
h
(
t
)
h(t)
h(t)与
s
(
t
)
s(t)
s(t)的卷积,因此这里的
h
(
τ
,
v
)
h(\tau, v)
h(τ,v)是类似于
h
(
t
)
h(t)
h(t)这样的角色,代表定义在了多普勒-延时域 (分别对应
v
v
v和
τ
\tau
τ)上的信道响应。此外,由于用户的移动性造成的多普勒频移,带来了后面这一项
e
j
2
π
ν
(
t
−
τ
)
e^{j 2 \pi \nu(t-\tau)}
ej2πν(t−τ)。这是因为用户的移动使得传输距离发生了变化,从而导致接收到信号相位的变化,反应为频率的变化,也即时变性的由来。 因此,式(1)刻画了这样一个时变的通信系统。 这里再多提一句,相比于时域模型,这里有两个维度:
v
v
v和
τ
\tau
τ,这是因为延迟相同的两条径可能对应了不同的移动速度,因此也应视为两条径。 而在计算接收信号时,需要把这些径的结果一起累加,因此是一个二维积分的形式。
这里有必要再对这一在多普勒-延时域上的信道建模和传统的时域-频域 (多径造成的频率选择性通过频域刻画, 时变性由时域刻画) 的信道建模进行比较,来说明其鲜明的特点和优势。
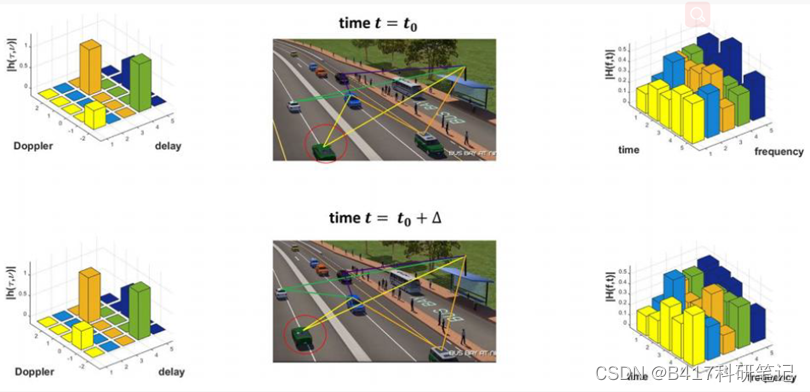
上图展示了对于同一信道场景, 在两种不同刻画下的形式。 中间的具体场景图中,每根不同颜色的线所对应的真实传输路径,例如黄色线,在多普勒-延时域中只体现为一个黄色的柱。 这是因为只需要一对移动速度信息
v
v
v和延时
τ
\tau
τ就可以精确描述这一径的所有信息。 另一方面,由于移动性和多径造成的时变性和频选性, 在时频域的刻画中, 可以看到黄色的柱子贯穿了整个时域,也即需要用更多的信息量才能进行描述。 在《Orthogonal Time-Frequency Space Modulation: A Promising Next-Generation Waveform》这篇Magazine文章中,作者总结了多普勒-延时域的四大优点如下:
- 分离性: 不同的径可以被清晰地分离出来。 例如,即使延时相同的两条径,但由于其时变性不同,也会体现在多普勒-延时域的不同网格之上。 相反,在时频域中则较难被精准分离。
- 稳定性: 由于用户的移动性,和每径的传输距离的变化速度相对较慢, 因此对应的多普勒-延时域的信道响应也相对稳定,也即信道变化更慢。与之相对的,高速运动场景下,一个相干时间内很可能只能容纳3个OFDM信号,这将严重增大信道估计的负担。
- 简洁性: 多普勒域的描述相对更加简洁。 文章指出,对于无线通信系统存在 4 τ m a x v m a x ≤ 1 4\tau_{max}v_{max}\le 1 4τmaxvmax≤1,因此,延时域的坐标范围为 [ 0 , τ m a x ] [0,\tau_{max}] [0,τmax],多普勒域的坐标范围为 [ − v m a x , v m a x ] [-v_{max}, v_{max}] [−vmax,vmax],相对简洁。
- 潜在稀疏性: 从图中我们也可以看出,由于在高频传输中, 路径数往往是非常有限的,因此其在多普勒-延时域上的结果也将是稀疏的。即对于大部分的 v v v和 τ \tau τ,信道响应都是 0 0 0。相反,对于传统的时频域信道,每条径作用在不同的时间和频域上,因此并不体现稀疏性。
OTFS调制
接下来,我们讲述下OTFS调制的具体过程。为便于理解,我们需要始终贯彻的一个思想是时刻将其与我们所熟悉的OFDM系统进行对标,从而能更深入地认识这一调制方式并理解其优越性所在。
OTFS的系统框图如下所示:
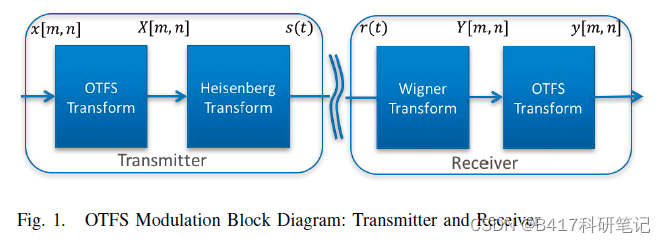
首先,我们所要传输的原始数据流是多普勒-延时域上的
x
[
n
,
m
]
x[n,m]
x[n,m], 我们将通过所谓的“OTFS transform”将其变换为时频域上的信号
X
[
n
,
m
]
X[n,m]
X[n,m]。这个OTFS transform包括了inverse symplectic Fourier transform和加窗操作,会在下文再详述。
接下来,通过对 X [ n , m ] X[n,m] X[n,m]进行 “Heisenberg transform”,可以将该调制信号转换为时域发送信号 s ( t ) s(t) s(t)。这一步我认为是对标OFDM系统中的IFFT操作,也即将一个时频域调制的信号变换为一个实际发送的时域信号模型。 紧接着, s ( t ) s(t) s(t)在信道中传输后,接收端需要对接收信号 r ( t ) r(t) r(t)进行一步“Wigner transform”,从而将该时域接收信号转换到时频域。这个“Wigner transform”是 “Heisenberg transform”的逆变换。因此,我认为这一步则是对标于OFDM系统中的FFT操作,与发送时的IFFT对应。最后,再次通过OTFS变换,将时频域信号转换到多普勒-延时域上的 y [ n , m ] y[n,m] y[n,m] 进行信号处理。
总结一下,相较于OFDM系统,OTFS需要在发送和接收处各多加一个OTFS转换,来完成在多普勒-延时域和时频域之间的变换。然而,核心的思路仍是类似的: 在更易进行信号处理的域上装载信息。 例如传统的OFDM系统,对于频选多径场景,直接在时域上进行信号处理将非常复杂。然而通过把信息装在在子载波上,由于每个子载波的平坦性,信号处理的难度将大幅降低。 相较于OFDM, OTFS则将时变性也考虑在内,并指出了在多普勒-时延域上进行信号处理的优势。 美中不足的是, 相较于OFDM中简单的FFT和IFFT操作, OTFS中所涉及的一系列Heisenberg transform等陌生的数学转换,实在是让人望而却步。然而这似乎也符合天下并无免费的午餐这一亘古不变的定律。接下来,让我们挑战一下这个OTFS的推导。
调制的细节
时频域调制
我们先按照论文中的顺序,介绍将时频域信号
X
[
n
,
m
]
X[n,m]
X[n,m]转换到时域信号
s
(
t
)
s(t)
s(t)的具体操作。首先,
X
[
n
,
m
]
X[n,m]
X[n,m]是加载在如下时频网格上的信息:
Λ
=
{
(
n
T
,
m
Δ
f
)
,
n
,
m
∈
Z
}
\Lambda=\{(n T, m \Delta f), \quad n, m \in \mathbb{Z}\}
Λ={(nT,mΔf),n,m∈Z}
我们将有:
s
(
t
)
=
∑
m
=
−
M
/
2
M
/
2
−
1
∑
n
=
0
N
−
1
X
[
n
,
m
]
g
t
x
(
t
−
n
T
)
e
j
2
π
m
Δ
f
(
t
−
n
T
)
(2)
s(t)=\sum_{m=-M / 2}^{M / 2-1} \sum_{n=0}^{N-1} X[n, m] g_{\mathrm{tx}}(t-n T) e^{j 2 \pi m \Delta f(t-n T)} \tag{2}
s(t)=m=−M/2∑M/2−1n=0∑N−1X[n,m]gtx(t−nT)ej2πmΔf(t−nT)(2)
其中,
g
t
x
g_{\mathrm{tx}}
gtx是发送成形滤波器,在接收端有与之对应的接收成形滤波器,它们符合如下关系:
∫
g
t
x
∗
(
t
)
g
r
x
(
t
−
n
T
)
e
j
2
π
m
Δ
f
(
t
−
n
T
)
d
t
=
δ
(
m
)
δ
(
n
)
\int g_{\mathrm{tx}}^{*}(t) g_{\mathrm{rx}}(t-n T) e^{j 2 \pi m \Delta f(t-n T)} \mathrm{d} t=\delta(m) \delta(n)
∫gtx∗(t)grx(t−nT)ej2πmΔf(t−nT)dt=δ(m)δ(n)
从而可以消除symbol间的干扰。这里(2)中的时频域到时域的变换也被称为 Heisenberg transform。作者指出,这可以被看作 OFDM系统中将频域信号转化为时域的 一种拓展。因为主要目的是为了理解OTFS的核心思想,其中具体的数学推导笔者也没有深究。继续向下看,作者指出(2)式可以通过定义Heisenberg operator
Π
X
(
⋅
)
\Pi_{X}(\cdot)
ΠX(⋅), 从而改写为:
s
(
t
)
=
Π
X
(
g
t
x
)
.
s(t)=\Pi_{X}\left(g_{\mathrm{tx}}\right).
s(t)=ΠX(gtx).
紧接着,结合(1),接收信号可以表示为:
r
(
t
)
=
∬
f
(
τ
,
ν
)
g
t
x
(
t
−
τ
)
e
j
2
π
ν
(
t
−
τ
)
d
ν
d
τ
+
v
(
t
)
r(t)=\iint f(\tau, \nu) g_{\mathrm{tx}}(t-\tau) e^{j 2 \pi \nu(t-\tau)} \mathrm{d} \nu \mathrm{d} \tau+v(t)
r(t)=∬f(τ,ν)gtx(t−τ)ej2πν(t−τ)dνdτ+v(t)
其中
v
(
t
)
v(t)
v(t)代表了噪声,而
f
(
τ
,
ν
)
f(\tau, \nu)
f(τ,ν)则由下式给出:
f
(
τ
,
ν
)
=
h
(
τ
,
ν
)
∗
σ
X
[
n
,
m
]
=
∑
m
=
−
M
/
2
M
/
2
−
1
∑
n
=
0
N
−
1
X
[
n
,
m
]
h
(
τ
−
n
T
,
ν
−
m
Δ
f
)
e
j
2
π
(
ν
−
m
Δ
f
)
n
T
.
\begin{aligned} &f(\tau, \nu)=h(\tau, \nu) *_{\sigma} X[n, m]= \\ &\sum_{m=-M / 2}^{M / 2-1} \sum_{n=0}^{N-1} X[n, m] h(\tau-n T, \nu-m \Delta f) e^{j 2 \pi(\nu-m \Delta f) n T} . \end{aligned}
f(τ,ν)=h(τ,ν)∗σX[n,m]=m=−M/2∑M/2−1n=0∑N−1X[n,m]h(τ−nT,ν−mΔf)ej2π(ν−mΔf)nT.
到这里已经相当迷茫了,我们先硬着头皮继续往下看。
在接收机一侧,对于接收到的信号,我们首先通过接受滤波器进行处理:
A
g
r
x
,
r
(
τ
,
ν
)
≜
∫
g
r
∗
(
t
−
τ
)
r
(
t
)
e
−
j
2
π
ν
(
t
−
τ
)
d
t
A_{g_{\mathrm{rx}}, r}(\tau, \nu) \triangleq \int g_{r}^{*}(t-\tau) r(t) e^{-j 2 \pi \nu(t-\tau)} \mathrm{d} t
Agrx,r(τ,ν)≜∫gr∗(t−τ)r(t)e−j2πν(t−τ)dt
然后对其进行采样,得到:
Y
[
n
,
m
]
=
A
g
r
x
,
r
(
τ
,
ν
)
∣
τ
=
n
T
,
ν
=
m
Δ
f
Y[n, m]=\left.A_{g_{\mathrm{rx}}, r}(\tau, \nu)\right|_{\tau=n T, \nu=m \Delta f}
Y[n,m]=Agrx,r(τ,ν)∣τ=nT,ν=mΔf
该变换也被称为Wigner transform。据此我们可以最终推导得到这样的一个端到端的表达式:
Y
[
n
,
m
]
=
H
[
n
,
m
]
X
[
n
,
m
]
(3)
Y[n, m]=H[n, m] X[n, m] \tag{3}
Y[n,m]=H[n,m]X[n,m](3)
其中,
H
[
n
,
m
]
H[n, m]
H[n,m]由下式给出:
H
[
n
,
m
]
=
∬
h
(
τ
,
ν
)
e
j
2
π
ν
n
T
e
−
j
2
π
(
ν
+
m
Δ
f
)
τ
d
ν
d
τ
(4)
H[n, m]=\iint h(\tau, \nu) e^{j 2 \pi \nu n T} e^{-j 2 \pi(\nu+m \Delta f) \tau} \mathrm{d} \nu \mathrm{d} \tau \tag{4}
H[n,m]=∬h(τ,ν)ej2πνnTe−j2π(ν+mΔf)τdνdτ(4)
(3)式中揭示了,使用OTFS调制,收发信号之间的关系与OFDM系统非常类似,也是直接相乘,有利于信号处理的简便性。 通过(3)式,我不禁有个疑问, 似乎直接从时频域进行传输信息就可以了,何必多此一举,非要在多普勒-延时域进行呢? 这是因为, (4)中所给出的
H
H
H的形式非常复杂,而在下一节我们将看到,通过OTFS调制可以对信道的表达式进行大幅的简化。
OTFS的调制与解调
上一小节中,说明了时频发送信号
X
[
n
,
m
]
X[n,m]
X[n,m]与接收信号
Y
[
n
,
m
]
Y[n,m]
Y[n,m]间的简单关系,尽管推导复杂,但结果是简洁的。 这一节中,需要补上OFTS系统的最后一步,即多普勒-时延域信号与时频域信号间的转换,也即OTFS-transform。 首先,我们以
X
p
[
n
,
m
]
X_{p}[n, m]
Xp[n,m]来表示
X
[
n
,
m
]
X[n, m]
X[n,m]的周期版本,其中周期为
(
N
,
M
)
(N,M)
(N,M),那么有 Symplectic Finite Fourier Transform (SFFT) 定义如下:
x
p
[
k
,
l
]
=
∑
n
=
0
N
−
1
∑
m
=
−
M
2
M
2
−
1
X
p
[
n
,
m
]
e
−
j
2
π
(
n
k
N
−
m
l
M
)
x_{p}[k, l]=\sum_{n=0}^{N-1} \sum_{m=-\frac{M}{2}}^{\frac{M}{2}-1} X_{p}[n, m] e^{-j 2 \pi\left(\frac{n k}{N}-\frac{m l}{M}\right)}
xp[k,l]=n=0∑N−1m=−2M∑2M−1Xp[n,m]e−j2π(Nnk−Mml)
我将其与普通的2D-FFT的式子进行了对比:
F
(
u
,
v
)
=
∑
x
=
0
M
−
1
∑
y
=
0
N
−
1
f
(
x
,
y
)
e
−
j
2
π
(
u
x
/
M
+
v
y
/
N
)
F(u, v)=\sum_{x=0}^{M-1} \sum_{y=0}^{N-1} f(x, y) e^{-j 2 \pi(u x / M+v y / N)}
F(u,v)=x=0∑M−1y=0∑N−1f(x,y)e−j2π(ux/M+vy/N)
发现差别似乎不大。其逆变换则定义为:
X
p
[
n
,
m
]
=
1
M
N
∑
l
,
k
x
[
k
,
l
]
e
j
2
π
(
n
k
N
−
m
l
M
)
X_{p}[n, m]=\frac{1}{M N} \sum_{l, k} x[k, l] e^{j 2 \pi\left(\frac{n k}{N}-\frac{m l}{M}\right)}
Xp[n,m]=MN1l,k∑x[k,l]ej2π(Nnk−Mml)
类似于圆周卷积的性质,有:
SFFT
(
X
1
[
n
,
m
]
⊛
X
2
[
n
,
m
]
)
=
SFFT
(
X
1
[
n
,
m
]
)
⋅
SFFT
(
X
2
[
n
,
m
]
)
,
\operatorname{SFFT}\left(X_{1}[n, m] \circledast X_{2}[n, m]\right)=\operatorname{SFFT}\left(X_{1}[n, m]\right) \cdot \operatorname{SFFT}\left(X_{2}[n, m]\right) \text {, }
SFFT(X1[n,m]⊛X2[n,m])=SFFT(X1[n,m])⋅SFFT(X2[n,m]),
接下来,考虑一组QAM信息符号,将其安置在2D网格上,得到多普勒-延时域的发送信息
x
[
k
,
l
]
,
k
=
0
,
…
,
N
−
1
,
l
=
0
,
⋯
,
M
−
1
x[k, l], k=0, \ldots, N-1, l=0,\cdots, M-1
x[k,l],k=0,…,N−1,l=0,⋯,M−1。通过进行Heisenberg transform可以得到时频域信号,即:
X
[
n
,
m
]
=
W
t
x
[
n
,
m
]
SFFT
−
1
(
x
[
k
,
l
]
)
X[n, m]=W_{\mathrm{tx}}[n, m] \operatorname{SFFT}^{-1}(x[k, l])
X[n,m]=Wtx[n,m]SFFT−1(x[k,l])
这里
W
t
x
[
n
,
m
]
W_{\mathrm{tx}}[n, m]
Wtx[n,m]传输窗函数。注意到上式可以再展开为:
X
[
n
,
m
]
=
1
M
N
W
t
r
[
n
,
m
]
∑
k
=
0
N
−
1
∑
l
=
0
M
−
1
x
[
k
,
l
]
b
k
,
l
[
n
,
m
]
b
k
,
l
[
n
,
m
]
=
e
−
j
2
π
(
m
l
M
−
n
k
N
)
\begin{aligned} X[n, m]=& \frac{1}{M N} W_{t r}[n, m] \sum_{k=0}^{N-1} \sum_{l=0}^{M-1} x[k, l] b_{k, l}[n, m] \\ b_{k, l}[n, m]&=e^{-j 2 \pi\left(\frac{m l}{M}-\frac{n k}{N}\right)} \end{aligned}
X[n,m]=bk,l[n,m]MN1Wtr[n,m]k=0∑N−1l=0∑M−1x[k,l]bk,l[n,m]=e−j2π(Mml−Nnk)
因此,这可以视为将符号
x
[
k
,
l
]
x[k,l]
x[k,l]调制到了一组二维基函数
b
k
,
l
[
n
,
m
]
b_{k, l}[n, m]
bk,l[n,m]之上,也即
X
[
n
,
m
]
X[n, m]
X[n,m]中包含了不同
k
,
l
k,l
k,l对应的符号信息,是一种自然的分集。
同时,在接收端则是镜像的类似操作:
Y
W
[
n
,
m
]
=
W
r
x
[
n
,
m
]
Y
[
n
,
m
]
Y
p
[
n
,
m
]
=
∑
k
,
l
=
−
∞
∞
Y
W
[
n
−
k
N
,
m
−
l
M
]
\begin{gathered} Y_{W}[n, m]=W_{\mathrm{rx}}[n, m] Y[n, m] \\ Y_{p}[n, m]=\sum_{k, l=-\infty}^{\infty} Y_{W}[n-k N, m-l M] \end{gathered}
YW[n,m]=Wrx[n,m]Y[n,m]Yp[n,m]=k,l=−∞∑∞YW[n−kN,m−lM]
可以得到:
x
^
[
l
,
k
]
=
y
[
l
,
k
]
=
SFFT
(
Y
p
[
n
,
m
]
)
,
\hat{x}[l, k]=y[l, k]=\operatorname{SFFT}\left(Y_{p}[n, m]\right),
x^[l,k]=y[l,k]=SFFT(Yp[n,m]),
根据一系列推导,作者得出如下结论:
x
^
[
k
,
l
]
=
1
M
N
∑
m
=
0
M
−
1
∑
n
=
0
N
−
1
x
[
n
,
m
]
h
w
(
k
−
n
N
T
,
l
−
m
M
Δ
f
)
(5)
\hat{x}[k, l]=\frac{1}{M N} \sum_{m=0}^{M-1} \sum_{n=0}^{N-1} x[n, m] h_{w}\left(\frac{k-n}{N T}, \frac{l-m}{M \Delta f}\right) \tag{5}
x^[k,l]=MN1m=0∑M−1n=0∑N−1x[n,m]hw(NTk−n,MΔfl−m)(5)
其中,
h
w
(
k
−
n
N
T
,
l
−
m
M
Δ
f
)
=
h
w
(
ν
′
,
τ
′
)
∣
ν
′
=
k
−
n
N
T
,
τ
′
=
l
−
m
M
Δ
f
h_{w}\left(\frac{k-n}{N T}, \frac{l-m}{M \Delta f}\right)=\left.h_{w}\left(\nu^{\prime}, \tau^{\prime}\right)\right|_{\nu^{\prime}=\frac{k-n}{N T}, \tau^{\prime}=\frac{l-m}{M \Delta f}}
hw(NTk−n,MΔfl−m)=hw(ν′,τ′)∣ν′=NTk−n,τ′=MΔfl−m
h
w
(
ν
′
,
τ
′
)
=
∬
h
(
τ
,
ν
)
w
(
ν
′
−
ν
,
τ
′
−
τ
)
e
−
j
2
π
ν
τ
d
τ
d
ν
h_{w}\left(\nu^{\prime}, \tau^{\prime}\right)=\iint h(\tau, \nu) w\left(\nu^{\prime}-\nu, \tau^{\prime}-\tau\right) e^{-j 2 \pi \nu \tau} \mathrm{d} \tau \mathrm{d} \nu
hw(ν′,τ′)=∬h(τ,ν)w(ν′−ν,τ′−τ)e−j2πντdτdν
这里定义略多,我们直接看(5)这个式子,注意到
∀
k
,
l
\forall k,l
∀k,l,
x
^
[
k
,
l
]
\hat{x}[k, l]
x^[k,l]中均包含了
x
[
k
,
l
]
h
w
(
0
,
0
)
x[k,l]h_w(0,0)
x[k,l]hw(0,0)这一项,而剩下的则是符号间的干扰。作者指出,当延时、多普勒扩展和窗函数满足一定条件时有,
h
w
(
k
−
n
N
T
,
l
−
m
M
Δ
f
)
≈
0
∀
n
≠
k
,
m
≠
l
h_{w}\left(\frac{k-n}{N T}, \frac{l-m}{M \Delta f}\right) \approx 0 \forall n \neq k, m \neq l
hw(NTk−n,MΔfl−m)≈0∀n=k,m=l
此时将不再有符号间干扰,也即:
x
^
[
k
,
l
]
=
x
[
k
,
l
]
h
w
(
0
,
0
)
\hat{x}[k, l] =x[k,l]h_w(0,0)
x^[k,l]=x[k,l]hw(0,0)
这就是说,对于多普勒-延时域的所有发送符号,可以视为经历的是相同的常量信道
h
w
(
0
,
0
)
h_w(0,0)
hw(0,0),这将大大简化信号处理的难度。
后记
目前暂时只对OTFS这一技术有一个粗浅的认知,尤其对其中的数学推导还没有深入探索。 后续如果有时间的话再深耕下。



















 2362
2362

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











