







文章目录
准备步骤

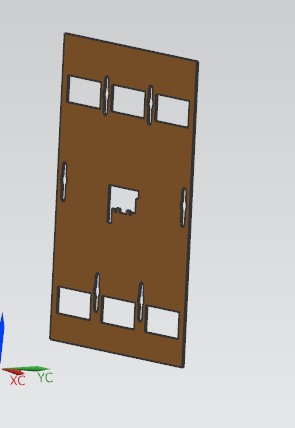
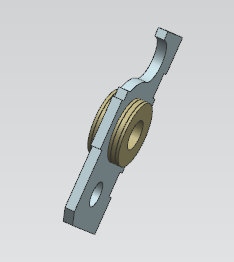
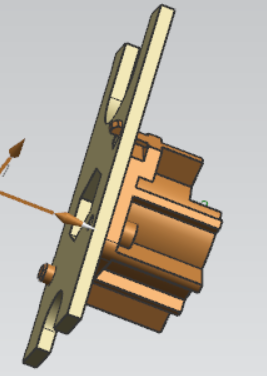
如图是一个只有外壳胶木件和母排的缩略版框架断路器和一个完整机械结构的抽屉座。在这里将对抽屉座进行机械结构的仿真

打开运动仿真模块
右键点击如图6.229.101新建仿真

1龙头导轨部分运动仿
首先不考虑动力部分,单纯考虑若是给龙头一个10rad/s的速度使我们的框架断路器移动到正确位置。
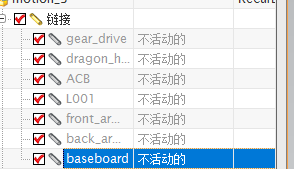
1.1创建连杆

1.gear_drive

2dragon_head
3ACB

4L001

5front_armor

6back_armor
7base_board

1.2创建运动幅
1龙头的旋转副,在这里同时驱动给一个10的初速度,后续动力侧仿真完毕再删除


2对acb向左侧的滑动幅,原点随意取了一个特征点。

3对L001向左的滑动副

4,5front_armor和back_armor向上滑动副

6gear_drive的转动副

7base_board的滑块幅

1.3添加连接器
对每个运动幅加一个阻尼器


添加接触
1龙头和ACB上凸点

2ACB和L001

3l001和front_armor
4L001和back_armor
5龙头和齿轮
6左右齿轮和底板

1.4求解


右击求解,得到结果
这里的驱动是龙头旋转副加了驱动,但实际上只要base_board有一个向前的速度就能驱动我们的龙头并使我们的机构向后移。所以关键要使base-board向后移这是我们这套抽屉座的动力部分。
2动力部分仿真
先对所有连杆停用,这样附带连接器和运动副也就都停用了,开始建立运动部分仿真
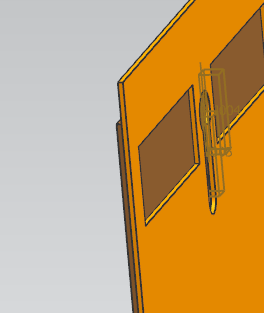
在这里模型中主要驱动力是1被摇杆转动,1与2之间有螺纹传动,带动底板向前移动,在向前移动时候,上方橙色指示轴与黑色轴套之间也有螺纹传动,带动指示轴转动显示抽屉座运动所在位置。

2.1添加链接器
1 baseboard
重新建立底板的链接器,加入之前没有考虑部分

正确模型中,此处有螺纹这里没有显示

2drive_shaft,
在这里把螺杆和这两个螺母固定一起共同运动

3limit

4limit2
就是这里六角螺纹孔限位,是摇杆不能转动,推动连杆3向前将其也向前后,摇杆可以摇动。

5limit3

6guding
2.2创建运动副
1j008:drive_shaft的旋转副,实际上是但这里模型没有螺纹传动故其实可以不加
2j009:移动副,一开始移动后可以让旋转的限位消失
考虑到这里不能用螺纹传动,所以部分传动其实用考虑,在这里改变思路,将传动部分仿真变为1限位件移动让转动轴转动的仿真和2底板移动与空头配合使指示件转动的
3 转动指示件转动
打开如下的连接,假设力还是龙头传动给,其实是螺纹传动摇杆给的
加一个连接G008,底板和螺纹轴

最后结果
4旋转轴仿真(之前有些错误,可以加螺纹传动副)
添加螺纹旋转副在baseboard和螺杆之间,其中运动副为


rotate运动副。

添加后运动完成,
演示
5限位功能
之前还是重新写一遍吧,包括连杆的
5.1连杆
1guding

2limit

3limit2
4limit3

5.2运动副
1guding -固定幅
2limit 滑块幅 J009
3limit2 滑块幅

4limit3 -J10
旋转副
5.3建立连接器
1guding-指示轴indicator-shaft之间的接触
2guding与limit2之间弹簧s001

3limit2与limit之间接触
4limit3与limit直接接触
5limit3与indicator之间的接触
6limit3弹簧
7limit2与主轴间接触-主要限位

8limt和guding间的3d接触

9limit2和guding的接触
10 limit 和limit3 间的3d接触
5.4添加驱动
对紫色limt上的滑块幅添加一个驱动














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









