






扫地机器人的路径规划策略(Matlab)
需要请随时联系博主!常在线能秒回!
功能介绍:设计并模拟扫地机器人的清洁路线,并与传统随机清扫方法进行比较。
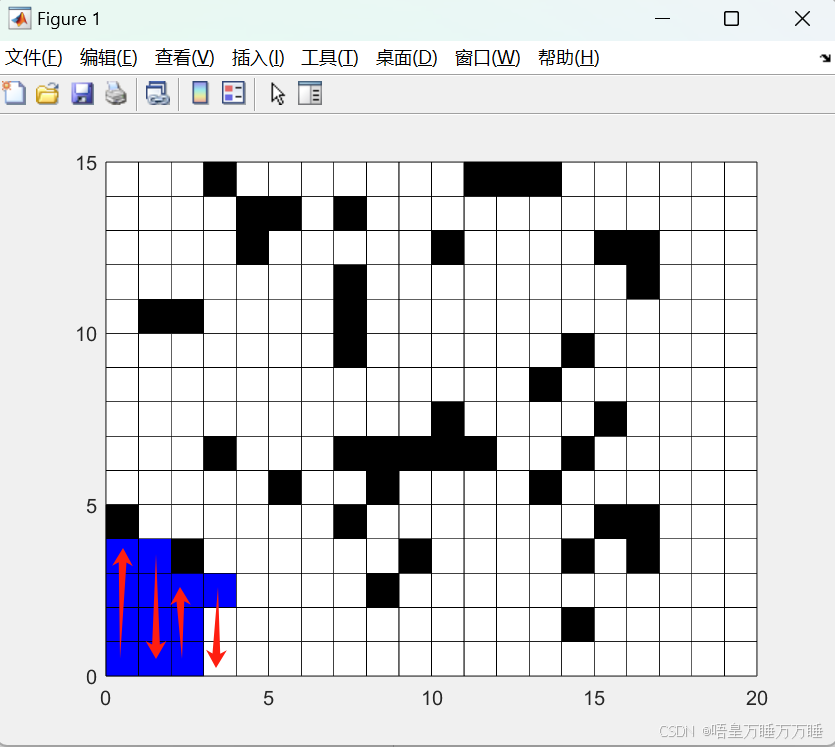
1. 设定扫地机器人的尺寸为1×1个网格单位,地图大小可调整为20×15(参数可自定义)。使用矩阵Tag记录障碍物布局,其中障碍物标记为1,空白区域标记为0,并通过函数随机布置障碍物。
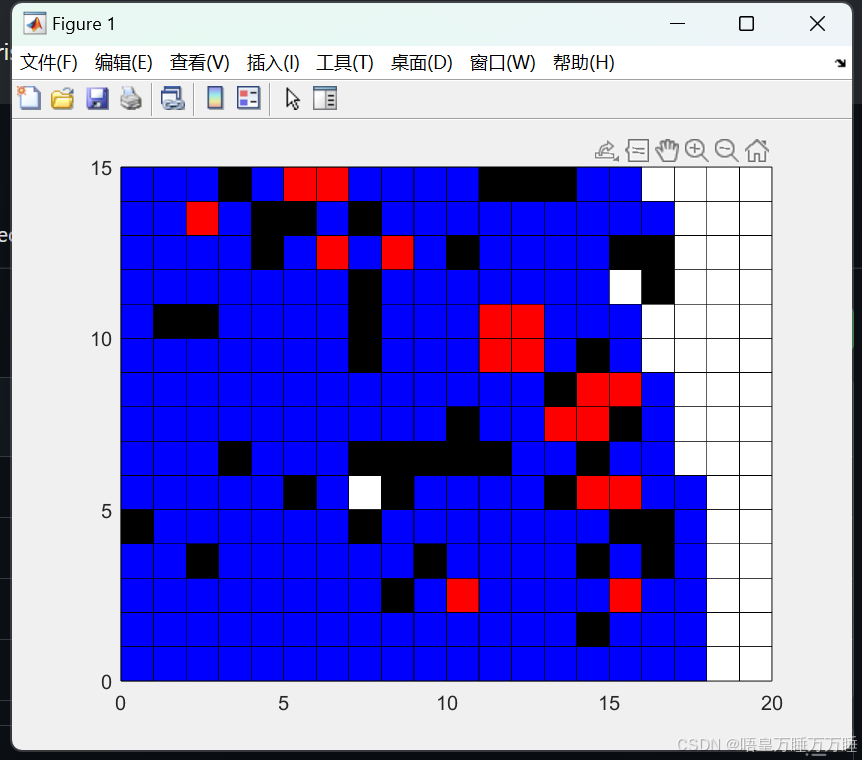
2. 路径规划策略采用深度优先搜索(DFS)算法。依据Tag矩阵中的信息,确定网格间的连通性,构建图的邻接表,并运用深度优先搜索算法来寻找清洁路径。
3. 在可视化环节,首先构建地图网格模型,并通过不同颜色的网格展示机器人的清洁过程:白色代表未清洁区域,黑色代表障碍物,蓝色表示已清洁一次,红色则表示多次清洁。
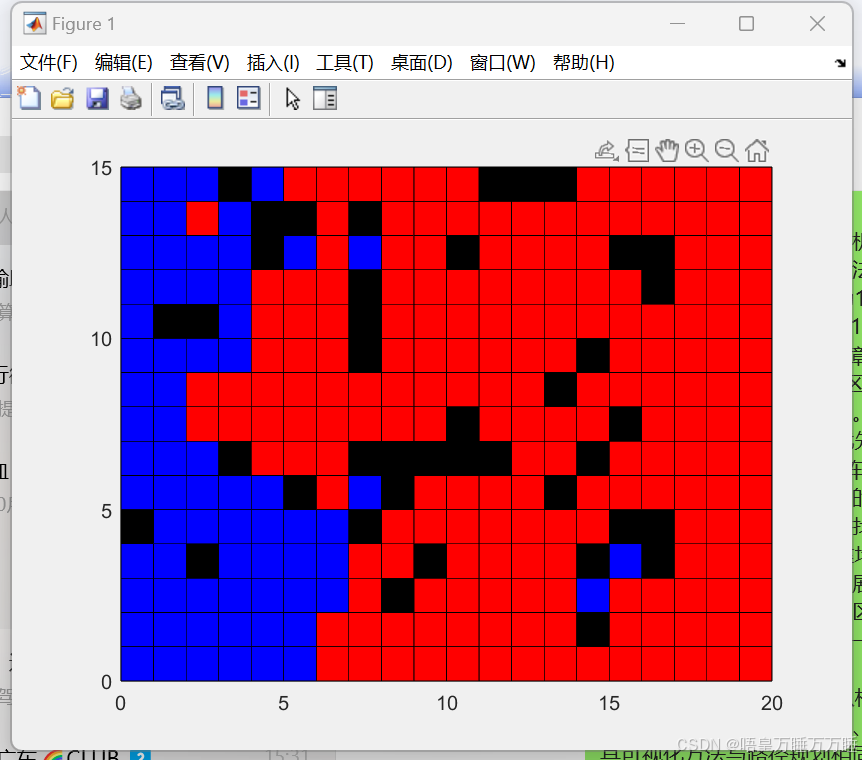
4. 随机游走策略让机器人以相等的概率向四个基本方向(上、下、左、右)移动。其可视化方法与路径规划相同,主函数输出路径规划和随机游走的总步数。


















 51
51

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











