





前言
上个周末在准备答辩的相关事宜,所以没有整理知识点更文。现在顺利完成了答辩,继续总结上次没弄完的知识点。
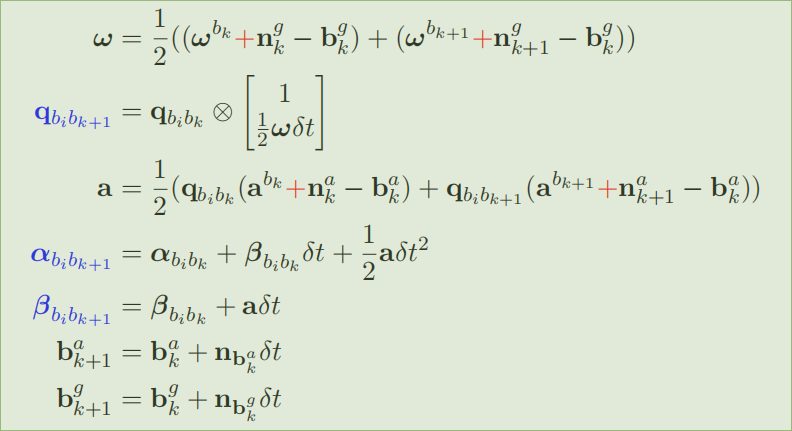
上次说到预积分的离散形式,给出了预积分的中值法离散表达公式:
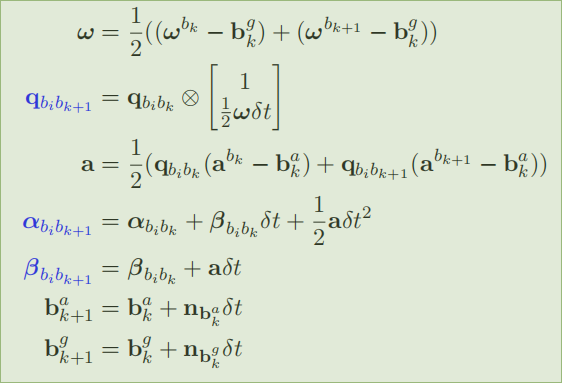
之前我一直在说公式里没有给出噪声和偏置的符号表示,这里终于添加了噪声的形式。
预积分的再思考
后面的知识点是预积分残差的协方差和雅可比的推导。在学习手写VIO课件的时候,我对这部分的内容一度非常迷惑,不知这两部分有什么用。后来结合CSDN博客上的解析,算是理解了一些。
首先回到出发点,我们为什么要预积分?
答:为了利用IMU传感器的加速度计和陀螺仪的数据,在减少计算量的情况下,对物体的位姿(Location和Pose)做一个估计。
预积分如何求解?
答:利用上述得到的离散预积分的公式,迭代的进行计算。
这个时候问题就出现了,由于存在噪声误差和偏置误差,如果不考虑这两个变量,随着时间的推移,这部分的误差会逐渐累计,影响到后面的位姿估计。课件里有个很好的比喻,就是综艺里面经常玩的一个游戏,给出一个词汇,第一个人看之后用肢体语言向第二个人表演,然后第二个人再向第三个人表演...经过几次传递后,最后一个人很难正确说出这个词汇。
因此,我们会用优化的方式对每次IMU计算得到的PVQ进行处理,把误差分摊到每一次测量上。
既然用到了误差,那么就要构建残差函数,预积分的误差函数为:
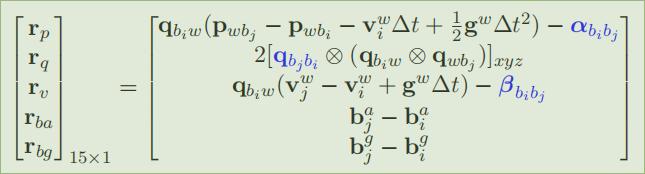
误差函数为一个15维的矩阵。其中,旋转部分四元数只取代表旋转的3个变量。
在计算机视觉中,对于非线性优化问题,通常使用迭代的方式进行求解,没错就是求导,那么我们需要计算预积分残差函数的雅可比矩阵。
为什么要确定IMU随机噪声和高斯噪声的协方差呢?
答:简单的说,协方差矩阵里的每个元素,就是优化问题中对应残差项的权重系数。
非线性优化中,IMU误差,相机重投影误差,他们的权重是受噪声协方差的影响。比如IMU噪声协方差小,权重大,更相信IMU。噪声协方差影响置信度,表示信谁多一点。VINS论文中公式没有直接说。
这里需要了解误差传递函数,来计算预积分量的协方差。
此外,还有一个预积分(不是预积分残差)的雅克比矩阵可以更新由于陀螺仪偏置造成的误差。
知道了上述知识点,才是完整的预积分过程和计算过程。
预积分量的协方差
首先来看看预积分量的协方差是如何计算的。
给出协方差的传递公式(数学上的知识,拿来直接用而不问为什么):
已知 
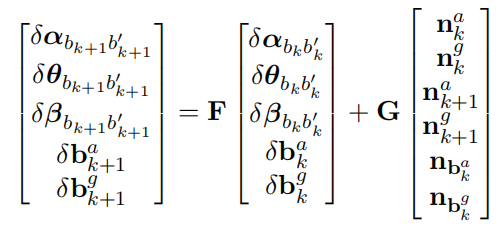
先给出相邻时刻误差的线性传递方程,后面会有证明:
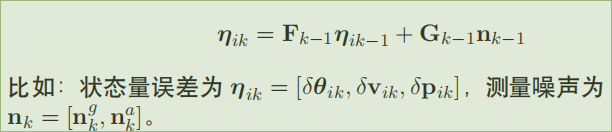
接着给出协方差矩阵的传递形式

为测量噪声的协方差矩阵,我们可以人为标定出来。
为状态量误差的协方差矩阵,是可以通过递推求出每一个时刻的协方差矩阵形式,最开始 。
接下来就是讨论F和G是如何求的
第一种方式
上面给出了相邻时刻的线性传递方程,它的推导如下:
令状态量为
其中 为真实值, 为误差,输入量u的噪声为n。
对于非线性系统

它的状态误差的线性递推关系如下:


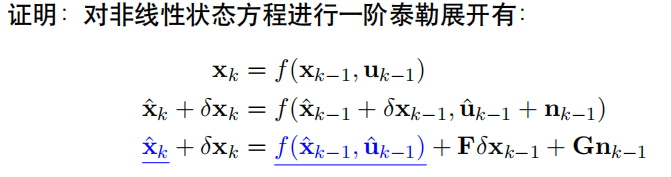
我们根据状态变量之间的关系就可以求F和G的雅可比矩阵。
第二种方式
如果我们知道误差随时间变化的导数关系,比如:
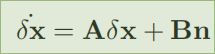
(课件里面为什么是这个关系,没想明白。跟下面速度和加速度的公式对不上。)
那么误差状态的传递方程为:

相比之前的线性推导关系,可以得到:

刚好在VINS中,我们是知道误差随时间变化的导数关系的。比如我们已经知道速度和状态量的关系:
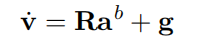
那么我们就可以推导速度的误差和状态a误差的关系
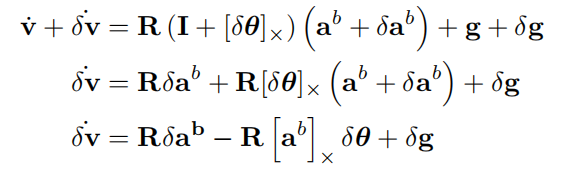
这样就可得到A和B的值,进而得到F和G。
回顾预积分的误差递推公式,把噪声和偏置都考虑进来,有:
根据第一种方式,我们希望得到如下的形式:
后面就是推导F和G了。
先给出最终的结果。
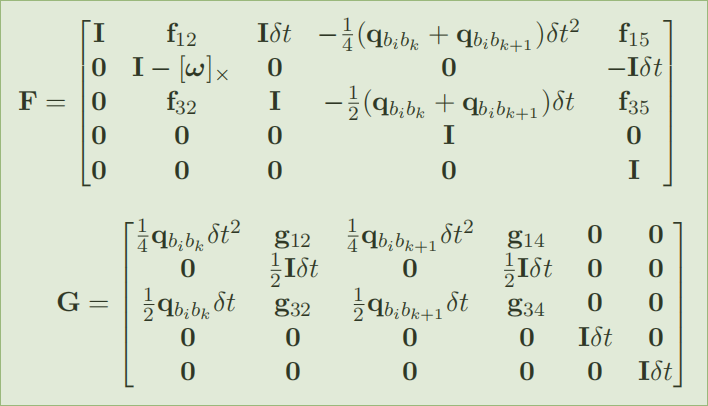
其中的系数为:
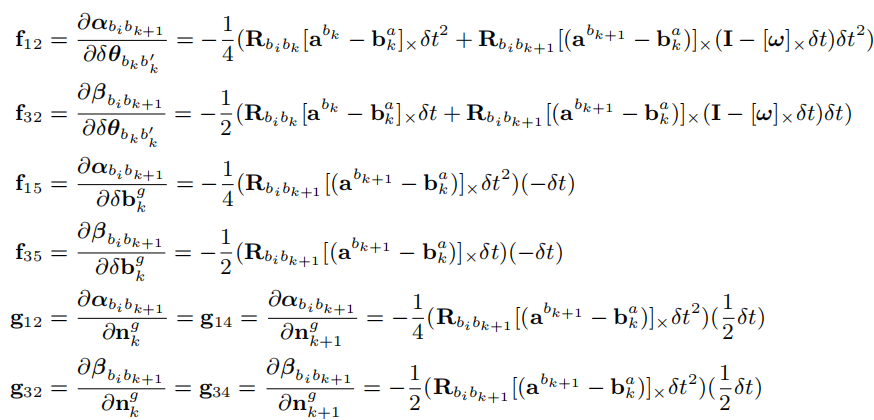
推导过程比较繁琐,我还没细看,后面再慢慢理解。
总结:公式那么多,最后要得到的就是预积分形式下误差递推的F和G的形式,然后再根据协方差的递推公式,得到当前状态下的协方差矩阵,后面优化的时候根据这个协方差矩阵去设置权重值。
这部分内容有些不好理解,照着讲义捋了一遍后思路清晰了很多,还是得多总结多思考。
结语
扯点其他的。
几天前完成了自己硕士毕业答辩,因为疫情影响,毕业答辩放在了网上。预答辩的时候没怎么准备,回答的一团糟,对自己的状态不是很满意,这次终答虽然准备的也比较仓促,但是表现的还行。
回想自己这三年,自己不算懒惰,几乎每次很晚才回寝室,大部分周末也待在实验室(单身狗的生活就是这么枯燥),可毕业的时候没有一篇满意的论文发布,毕设做的东西也烂的和shit一样。心里还是有不少遗憾的,和自己最开始读研时候的“雄心壮志”差的有点远。
原因也有想过,可能还是自己太菜了吧,然后选择的课题不太对,研究的人和成果太少。。。最后老师给的研究的题目属于戴着枷锁跳舞。
现在总算是毕业了,大学时候参加的飞思卡尔比赛,到读研时候选择三维方向,以及现在参加工作时选择的行业,也算是不忘初心。缺憾就是在SLAM领域,我才刚刚起步,和认识的同届专门做无人驾驶的朋友差了不少。
种下一棵树最好的时间是十年前,其次就是现在。与自己做个一年的约定,看一年后自己比现在进步如何。
加油吧。
参考资料
[1] 贺一家,高翔,崔华坤,手写VIO讲义















 229
229











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









