






信息融合算法分析
在多传感器系统中,综合分析和处理数据时需要依靠融合算法进行实现,目前,尚未有一种信息融合算法可以应用于不同的传感器或可适用于每一层级的信息融合,针对不同层级的信息融合,有相对应的适用的、高效的融合算法。在具体的工程应用时,应该根据应用领域、用途选择适用于工程项目的融合算法,图 5.6 显示了融合算法的具体分类。
石显:多传感器信息融合算法设计及仿真——基于 MATLAB 的三层 BP 神经网络的设计与仿真zhuanlan.zhihu.com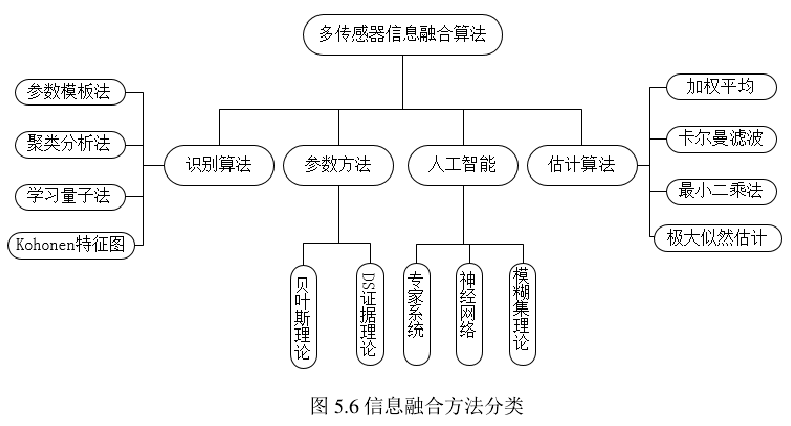
1 Kalman 滤波
Kalman 滤波是一种利用状态空间方法构建系统模型并完成滤波的线性最小方差估计递推算法。在测量方差已知的情况下能够从一系列存在测量噪声的数据中,估计动态系统的状态,并可对现场采集的数据进行实时的更新和处理,且便于计算机编程实现。Kalman 滤波目前在通信、导航、制导、控制领域得到了较好的应用。 Kalman 滤波主要分为两种:离散 Kalman 滤波、扩展 Kalman 滤波。这里主要介绍离散Kalman 滤波。
①离散时间线性系统模型
一个可用线性随微分方程来描述的离散控制过程,受加性高斯白噪声的影响。系统的状态方程为:

矩阵 ( )、 ( )、 ( )、 ( )、 ( )假定为已知并可能是时变的,即系统可能是时变的,噪声也可能是非平稳随机噪声。过程噪声与测量噪声序列及初始状态假定是彼此不相关的。这些假定在 Kalman 滤波模型中被总称为线性高斯假定。
②离散 Kalman 滤波算法流程
在离散 Kalman 滤波算法中,通过结合k + 1时刻的状态预测结果 ( + 1| )和 + 1时刻的状态测量值 ( + 1),就可得到 + 1时刻的最优化估计值 ( + 1| + 1),主要步骤如下: 状态一步预测方程:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 78
78











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









