







产品形态
随着电驱动系统的集成度不断提升,对电控、电机、减速器等部件供应商提出更高工艺要求,需要更高的适配性与可靠性

国外企业
国外,主要以博世、西门子、吉凯恩、采埃孚为代表的电驱动系统集成商推出了一体化电驱劢总成产,包 括电控与驱动电机及减速器总成,也是目前乘用车驱动系统的主要应用类型

国内企业

电机控制器
为实现电驱动的高度集成,在电机控制器方面提升集成度、功率密度和效率是主要发展方向,目前国内外 主流电控供应商产品的功率密度均已达到15~25kW/L以上

主要挑战
对电驱动行业来说,现阶段新能源车企众多,正处于多技术布局,产品和技术需求多样,但目前市场太 小,无法规模化降本

应对思考
企业,需聚焦核心资源,做好自己擅长领域,核心技 术才是真正的竞争力,开可以通过技术创新实现降本 增效
行业,零部件企业应加强合作,建立产业联盟,以强强联合+资源共享的方式,实现多技术路径探索成本分摊
产品,专注于技术创新与优化,以平台化产品来实现 不同需求的小批量多样化
电驱劢总成中的电控软件设计
软件设计
基于HIL平台的系统集成测试


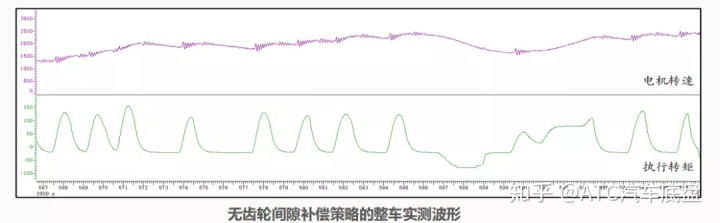
基于非线性力矩规划的防打轰策略
- 基于非线性力矩规 划的防打轰策略 - 齿轮间隙的存在导致起步,刹车油门切换、松油门进入滑行 能量回收等工况存在 异常响劢,对驾驶感 受和齿轮寿命存在影响- 根据转速规划的非线性转矩避免了打轰 提高了齿轮的寿命和驾驶感受

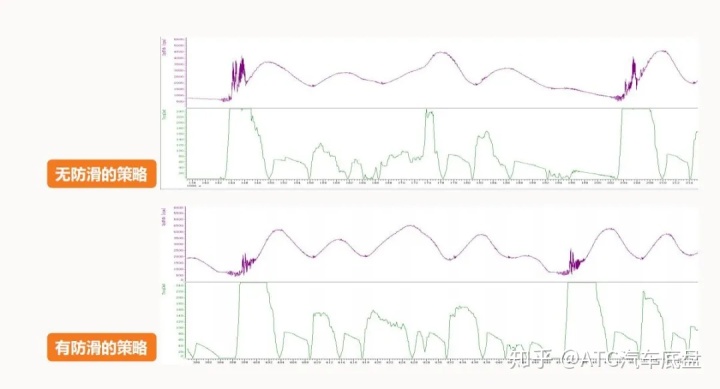
基于加速度的防滑策略
- 基于加速度的防滑保护策略 - 未加入防滑策略的在过减速带或高附着 路面到低附着路面对差速器伤害大 - 加入防滑策略的可以防止速度突变进而 保护差速器
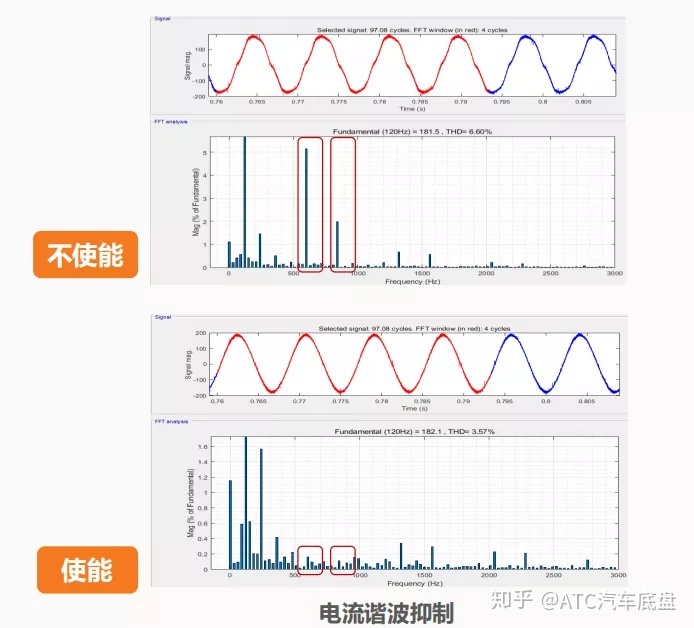
系统NVH优化控制
- 自学习主动补偿技术
- 有源阻尼控制技术
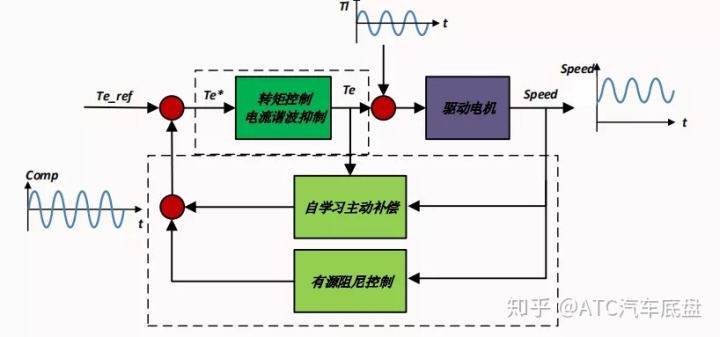

- 通过谐波注入算法,抑制特定次电流谐波和转矩脉动,提升系统的NVH性能

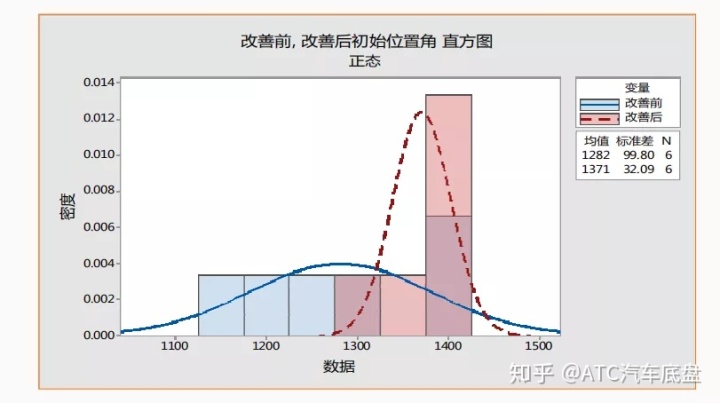
初始位置辨识
采用低速旋转和高速补偿的双方案初始位置角度辨识方案:
- 低速采用注入不同的电流矢量客服负载摩擦力影响 - 高速采用d轰闭环进行延迟补偿 - 经过初始位置旋转辨识和高速位置补偿,位置偏差小于±1°

电驱劢总成中的电控硬件设计
功能安全
符合EGAS三层监控系统架构
- 第三方功能安全专家咨询团队全 程参与辅导- 符合ASILC安全等级,可扩展至 ASIL D- 概念阶段,系统阶段,硬件/软件 设计阶段全程自主知识产权

合理的硬件架构确保高诊断覆盖率
硬件架构
- 3核CPU+SBC外部看门狗,基于EGAS三层监 控理论的满足 ASIL C的硬件架构。
技术特点
- 带监控的可靠电源架构 - 重要信号冗余采样+校验 - 两条独立的关断路径+应急电源主劢短路 - 休眠+远程唤醒 - 高级有源钳位
针对某安全目标
SPFM (Target ≥ 97%)
- 99.7%LFM (Target ≥ 80%)
- 99.1% PMHF ( Target ≤100 Fit)
- 10.1Fit

完全符合AUTOSAR架构的软件平台
平台特性
- 完全符合AUTOSAR V4.2.2架构
- 应用层 100% 基于模型开发(MBD)
- 最高可实现ASIL C/D 的安全等级
- 实现功能安全高内聚,低耦合的软件要求 - 转矩控制/转速控制/电压控制多种控制模式 - 低载波比/变开关频率/DPWM保证电机高速/高转矩性能 - 驻坡控制/驱动防滑/有源阻尼/随机开关频率配合实现 整车性能 - 可开放部分应用层接口,支持整车厂自主开发集成整车控制算法
















 209
209











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









