






下面介绍《Associatively Segmenting Instances and Semantics in Point Clouds》中论文方法中的联合分割模块。联合分割模块分成两路,一路是segment aware的实例分割,就是富有语义感知的实例分割,另一路是instances的语义分割,也就是融合了实例的语义分割。下面分别介绍:
第一个:富有语义的实例分割
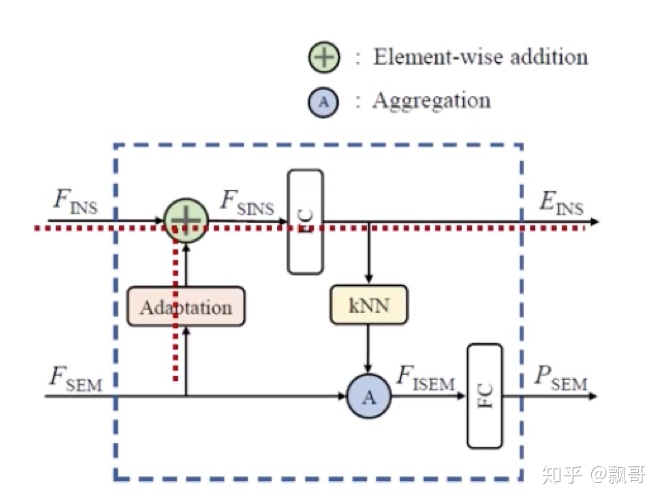
富有语义的实例分割是上图中红色虚线的一路。在语义特征空间中点的位置是根据类别决定的,属于同一个语义类别的点在语义类别空间中是相近的,不属于同一个语义类别的点在语义类别空间中是远的,从这个特点出发, 论文中的方法把实例特征和语义特征按元素相加,中间有一个adaptation,后面有adaptation study,这样其实相当于一种learnable的方式,把属于不同类别的实例,在实例特征空间里面排斥开。这样有利后面进一步学习实例的嵌入向量。
第二个:融合实例的语义分割
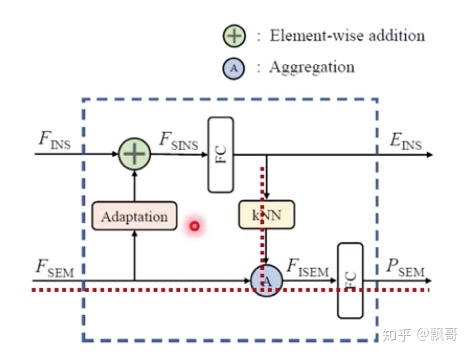
融合实例的语义分割是上图中红色曲线部分。它的子动机是一个点在分割的时候,之所以被分为哪一类,是因为这个点属于的那个实例是属于那一类,所以在做预测时,如果能够考虑它所在的实例,是会有帮助。它的大致流程其实是,使用实例嵌入向量做knn,就可以知道每一个点在实例嵌入向量空间中最近的k个点就是属于同一个实例的点,有了这个索引之后,可以把语义特征组合组合再进行融合,得到新的语义特征,就是把属于同一个实例的语义特征进行一个融合。
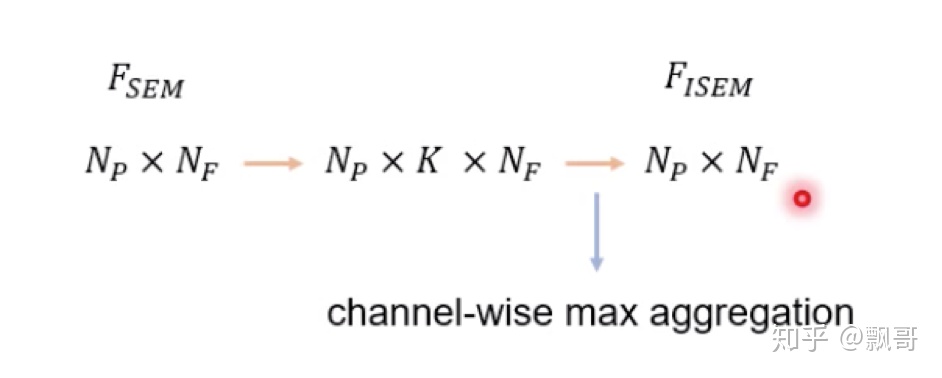
然后得到新的np*nf的语义特征,用来后面做做语义分类。上图中融合采用的就是channel-wise的max aggregation。 论文做了很多实验,在s3dis数据集(S3DIS全称斯坦福三维室内分割数据集Stanford 3D Indoor Semantics Dataset,该数据集包括6个场景中271个房间的扫描数据。点云中的每一个点都指定了分割类别和实例类别。 )上。它要进行室内场景的分割,下图是实例分割的结果:
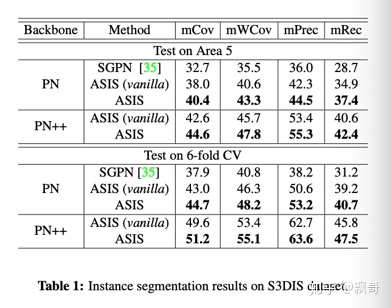
论文采用了4种(上图)不同的指标,两种不同的测试方式,就是在s3dis数据集上采用的两种通用方式,一种是area 5子集上测,一种6-fold上做 cross validation,使用pointnet和pointnet两种不同的主干网络,测试的结论是论文的base line比之前的方法要好,论文中的联合模块性能可以提升1~3个点。
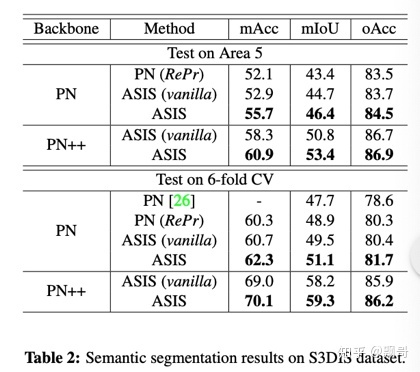
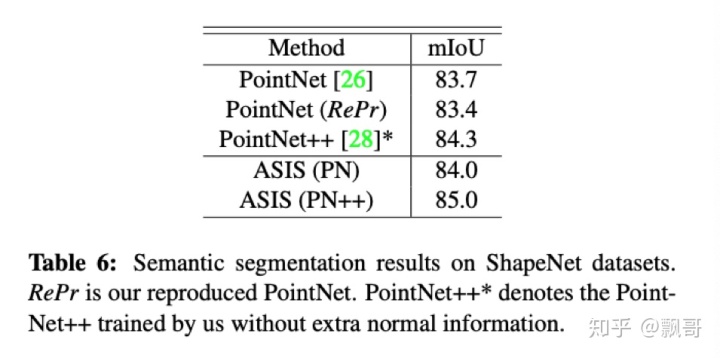
论文另外一个实验采用了三个指标(上图),分别是mAcc, mIoU,overall accuracy (oAcc),使用了两种测试方式,两种主干网络。结论也是一致的。联合分割可以进一步的提升1~3个点。这次实验在mIoU上达到了59.3%的结果。
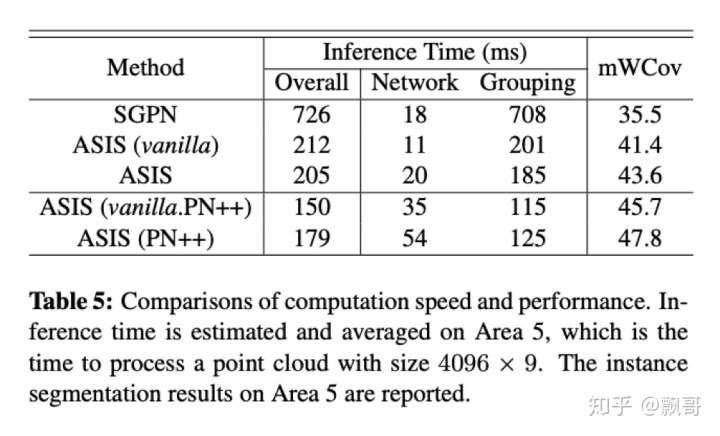
论文还进行了计算速度的测试, 跟之前的方法比如sgpn,计算4096*9的点云,就是4096个点,每个点是9维的向量,需要726毫秒。论文同样采用pointnet做为主干网络比它快三倍多,使用pointnet++会更快一些。
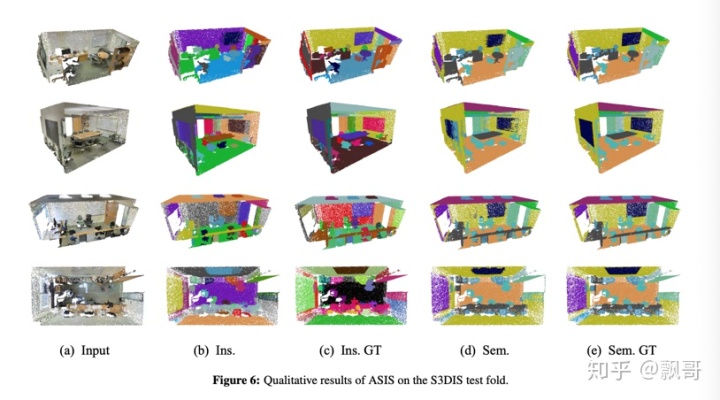
上图展示了在S3DIS上的结果。a列是输入的点云,b列是实例分割的结果,c列是实例分割的ground truth,d列是语义分割结果,e列是语义的ground truth。 可以看到实例分割,不同颜色表示不同的实例,语义分割不同颜色表示不同类别,像上图中d列第二行的图像中蓝色表示椅子,桌子用棕色。
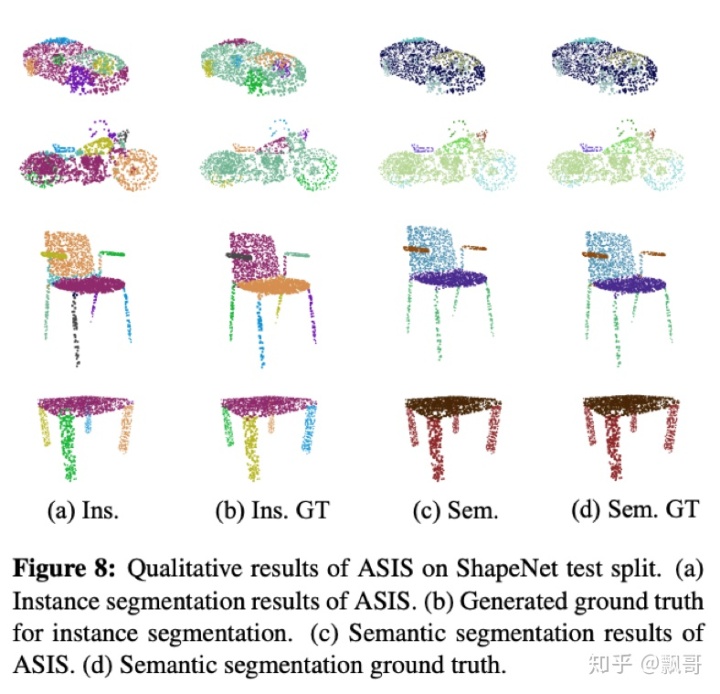
论文还在shapenet数据集(包含3D模型,和3d模型的类别标注的数据集,覆盖了常用的3D数据集PASCAL 3D+。它涵盖55个常见的对象类别,有大约51,300个3D模型),它是一个部件的数据集,把桌子椅子小车分成不同的部件,如桌子腿,桌子背等。
测试结果也和前面一致。有稳定的提升。定性的是可以看到它在shapenet数据集上实例分割结果,如前图中的小轿车(a列第一行),小轿车的不同部件,4个轮胎,(a列第二行)摩托车的两个轮胎,(a列第三行)椅子4条腿都分成了不同的实例,效果还是不错的。前图中的第三列和第四列是语义分割。
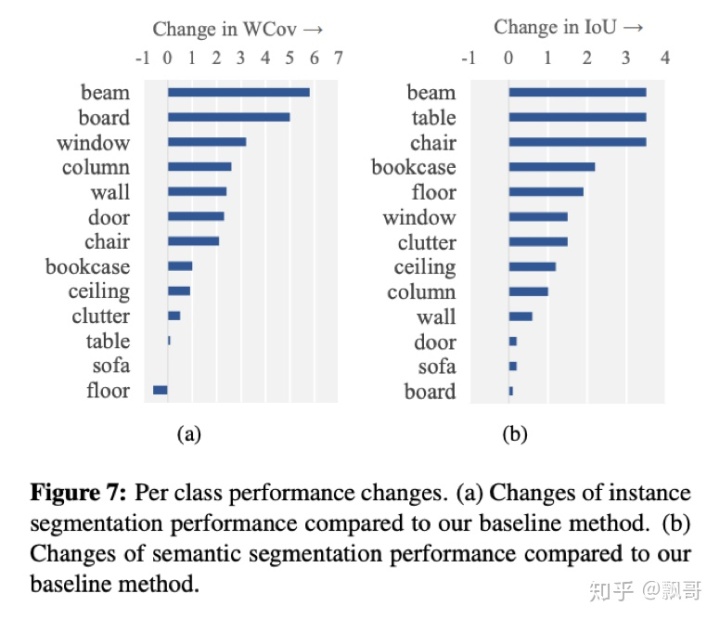
最后论文对提升进行了分析,一种是把模块进行了拆分,然后看每一块的作用,就得到上图中左图。另一种是按类别的提升,s3dis有13个类,可以看到在每一个类上的涨点分布情况。上图左图是实例分割的涨点,涨点比较大的是board和window等类,他们涨点比较多事因为白板和窗户都是嵌入到墙上的,如果直接做实例分割,很容易被认为是同一个实例,由于有语义帮助,可以知道它是不同类别,不同类别就是属于不同实例,这也就是联合分割的意义所在。右图是语义分割的涨点,它涨点比较大的是table,chair等,结构比较复杂的实例,如果能够融合整个实例进行语义预测,可以帮助语义分割做的更好,所以它的涨点会更多一些。
总结下来,论文有三个贡献:
一. 提出一个比较合理的base line,同时分割3d点云的实例和语义。
二. 提出联合分割框架,把实例分割和语义分割两个任务给联系起来。它和全景分割比较相似,
但不一样在的是全景分割是需要得到统一的输出格式,而论文是寻找两种任务之间的联系。
三. 论文中的方法比之前的方法在实例分割上好很多,然在语义分割上也有非常明显的提升。Code:
WXinlong/ASISgithub.com
(本文完)
参看前文:
飘哥:学习《联合分割点云中的实例和语义》论文(一)如何获得点云以及如何在点云上做深度学习zhuanlan.zhihu.com
















 1099
1099











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









