








在前面讲的好多巡线的过程,我们的车体始终是以最快的速度进行巡线。这显然是不合理的,当我们遇到急弯等大角度的转向将会导至我们的车体会飞线。如何让小车依据看到的黑线自动变速呢?
我们这里需要使用到了一个单调函数:y=100-|b|×c;(其中:100是马达功率,b为传感器之间的差值,c为功率系数和转向系数(变化值为0≤c<1)。
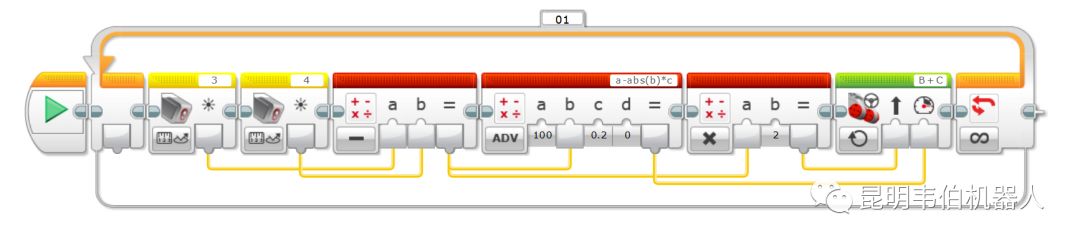
(上图为EV3中的编程方式)
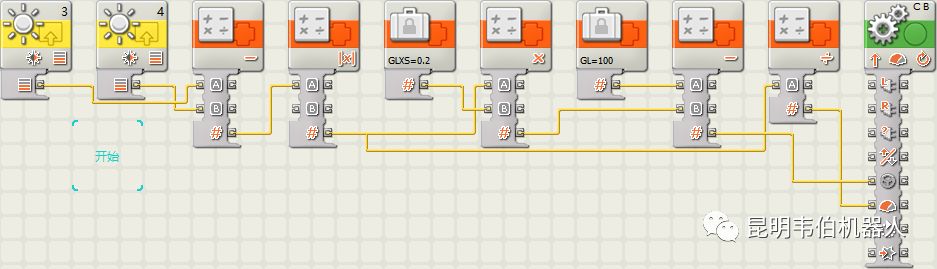
(上图为NXT中的编程方式)
运用本程序进行巡线,无论是转向的角度还是行进速度均由机器人自动计算完成的,巡线效率较高。
本函数(单调减函数)可以这样子理解:
1、差越大(急弯),公式的值越小&#x
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









