





总体思路
增加了地图点模块,并且增加了对地图点的优化模块,维护地图规模。整个程序的流程如下:
- 输入:color,depth以及二者对应的时间戳
- 初始帧
- 当前帧和参考帧都设置为输入帧
- 提取特征点
- 计算描述子
- 增加关键帧
- 其他帧
- 将当前帧设置为输入帧
- 当前帧的位姿设置为参考帧的位姿
- 提取特征点
- 计算描述子
- 特征匹配
- 地图中的点都是三维坐标
- 首先检查点是否在视野范围内(先预设当前帧的位姿为参考帧的位姿)
- 匹配的时候,地图点的描述子进行匹配,
- 地图中的点都是三维坐标
- PnP估计位姿
- 检查位姿是否OK,位姿的R,t不超过阈值量属OK。
- 如果ok
- 将当前帧的位姿更新为估计的位姿。
- 优化地图点
- 用更新的位姿计算地图点是否在当前帧可见,删除地图点
- 由匹配次数除以可见次数,得到一个匹配比例。如果匹配比例小于设定的匹配比例,则删除地图点。
- 获取当前帧和地图点的视角,向量为3D坐标减去相机中心坐标作为法向量n,
乘以点的法向量,求反余弦,即为点与平面的视角。如果视角大于
,去掉该地图点。
- 如果地图点数量小于100,增加地图点。
- 如果地图点数量大于1000,将去掉的比例增加0.05。
- 否则擦除比例为0.1。
- 检查关键帧是否ok,如果Ok
- 增加关键帧
- 否则
-
- 对丢帧计数
- 如果计数超过阈值将状态更新为丢失。
-
- 如果ok
visual_odometry.cpp
/*
* <one line to give the program's name and a brief idea of what it does.>
* Copyright (C) 2016 <copyright holder> <email>
*
* This program is free software: you can redistribute it and/or modify
* it under the terms of the GNU General Public License as published by
* the Free Software Foundation, either version 3 of the License, or
* (at your option) any later version.
*
* This program is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*
* You should have received a copy of the GNU General Public License
* along with this program. If not, see <http://www.gnu.org/licenses/>.
*
*/
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/calib3d/calib3d.hpp>
#include <algorithm>
#include <boost/timer.hpp>
#include "myslam/config.h"
#include "myslam/visual_odometry.h"
#include "myslam/g2o_types.h"
namespace myslam
{
VisualOdometry::VisualOdometry() :
state_ ( INITIALIZING ), ref_ ( nullptr ), curr_ ( nullptr ), map_ ( new Map ), num_lost_ ( 0 ), num_inliers_ ( 0 ), matcher_flann_ ( new cv::flann::LshIndexParams ( 5,10,2 ) )
{
num_of_features_ = Config::get<int> ( "number_of_features" );
scale_factor_ = Config::get<double> ( "scale_factor" );
level_pyramid_ = Config::get<int> ( "level_pyramid" );
match_ratio_ = Config::get<float> ( "match_ratio" );
max_num_lost_ = Config::get<float> ( "max_num_lost" );
min_inliers_ = Config::get<int> ( "min_inliers" );
key_frame_min_rot = Config::get<double> ( "keyframe_rotation" );
key_frame_min_trans = Config::get<double> ( "keyframe_translation" );
map_point_erase_ratio_ = Config::get<double> ( "map_point_erase_ratio" );
orb_ = cv::ORB::create ( num_of_features_, scale_factor_, level_pyramid_ );
}
VisualOdometry::~VisualOdometry()
{
}
bool VisualOdometry::addFrame ( Frame::Ptr frame )
{
switch ( state_ )
{
case INITIALIZING:
{
state_ = OK;
curr_ = ref_ = frame;
// extract features from first frame and add them into map
extractKeyPoints();
computeDescriptors();
addKeyFrame(); // the first frame is a key-frame
break;
}
case OK:
{
curr_ = frame;
curr_->T_c_w_ = ref_->T_c_w_;
extractKeyPoints();
computeDescriptors();
featureMatching();
poseEstimationPnP();
if ( checkEstimatedPose() == true ) // a good estimation
{
curr_->T_c_w_ = T_c_w_estimated_;
optimizeMap();
num_lost_ = 0;
if ( checkKeyFrame() == true ) // is a key-frame
{
addKeyFrame();
}
}
else // bad estimation due to various reasons
{
num_lost_++;
if ( num_lost_ > max_num_lost_ )
{
state_ = LOST;
}
return false;
}
break;
}
case LOST:
{
cout<<"vo has lost."<<endl;
break;
}
}
return true;
}
void VisualOdometry::extractKeyPoints()
{
boost::timer timer;
orb_->detect ( curr_->color_, keypoints_curr_ );
cout<<"extract keypoints cost time: "<<timer.elapsed() <<endl;
}
void VisualOdometry::computeDescriptors()
{
boost::timer timer;
orb_->compute ( curr_->color_, keypoints_curr_, descriptors_curr_ );
cout<<"descriptor computation cost time: "<<timer.elapsed() <<endl;
}
void VisualOdometry::featureMatching()
{
boost::timer timer;
vector<cv::DMatch> matches;
// select the candidates in map
Mat desp_map;
vector<MapPoint::Ptr> candidate;
for ( auto& allpoints: map_->map_points_ )
{
MapPoint::Ptr& p = allpoints.second;
// check if p in curr frame image
if ( curr_->isInFrame(p->pos_) )
{
// add to candidate
p->visible_times_++;
candidate.push_back( p );
desp_map.push_back( p->descriptor_ );
}
}
matcher_flann_.match ( desp_map, descriptors_curr_, matches );
// select the best matches
float min_dis = std::min_element (
matches.begin(), matches.end(),
[] ( const cv::DMatch& m1, const cv::DMatch& m2 )
{
return m1.distance < m2.distance;
} )->distance;
match_3dpts_.clear();
match_2dkp_index_.clear();
for ( cv::DMatch& m : matches )
{
if ( m.distance < max<float> ( min_dis*match_ratio_, 30.0 ) )
{
match_3dpts_.push_back( candidate[m.queryIdx] );
match_2dkp_index_.push_back( m.trainIdx );
}
}
cout<<"good matches: "<<match_3dpts_.size() <<endl;
cout<<"match cost time: "<<timer.elapsed() <<endl;
}
void VisualOdometry::poseEstimationPnP()
{
// construct the 3d 2d observations
vector<cv::Point3f> pts3d;
vector<cv::Point2f> pts2d;
for ( int index:match_2dkp_index_ )
{
pts2d.push_back ( keypoints_curr_[index].pt );
}
for ( MapPoint::Ptr pt:match_3dpts_ )
{
pts3d.push_back( pt->getPositionCV() );
}
Mat K = ( cv::Mat_<double> ( 3,3 ) <<
ref_->camera_->fx_, 0, ref_->camera_->cx_,
0, ref_->camera_->fy_, ref_->camera_->cy_,
0,0,1
);
Mat rvec, tvec, inliers;
cv::solvePnPRansac ( pts3d, pts2d, K, Mat(), rvec, tvec, false, 100, 4.0, 0.99, inliers );
num_inliers_ = inliers.rows;
cout<<"pnp inliers: "<<num_inliers_<<endl;
T_c_w_estimated_ = SE3 (
SO3 ( rvec.at<double> ( 0,0 ), rvec.at<double> ( 1,0 ), rvec.at<double> ( 2,0 ) ),
Vector3d ( tvec.at<double> ( 0,0 ), tvec.at<double> ( 1,0 ), tvec.at<double> ( 2,0 ) )
);
// using bundle adjustment to optimize the pose
typedef g2o::BlockSolver<g2o::BlockSolverTraits<6,2>> Block;
Block::LinearSolverType* linearSolver = new g2o::LinearSolverDense<Block::PoseMatrixType>();
Block* solver_ptr = new Block ( linearSolver );
g2o::OptimizationAlgorithmLevenberg* solver = new g2o::OptimizationAlgorithmLevenberg ( solver_ptr );
g2o::SparseOptimizer optimizer;
optimizer.setAlgorithm ( solver );
g2o::VertexSE3Expmap* pose = new g2o::VertexSE3Expmap();
pose->setId ( 0 );
pose->setEstimate ( g2o::SE3Quat (
T_c_w_estimated_.rotation_matrix(), T_c_w_estimated_.translation()
));
optimizer.addVertex ( pose );
// edges
for ( int i=0; i<inliers.rows; i++ )
{
int index = inliers.at<int> ( i,0 );
// 3D -> 2D projection
EdgeProjectXYZ2UVPoseOnly* edge = new EdgeProjectXYZ2UVPoseOnly();
edge->setId ( i );
edge->setVertex ( 0, pose );
edge->camera_ = curr_->camera_.get();
edge->point_ = Vector3d ( pts3d[index].x, pts3d[index].y, pts3d[index].z );
edge->setMeasurement ( Vector2d ( pts2d[index].x, pts2d[index].y ) );
edge->setInformation ( Eigen::Matrix2d::Identity() );
optimizer.addEdge ( edge );
// set the inlier map points
match_3dpts_[index]->matched_times_++;
}
optimizer.initializeOptimization();
optimizer.optimize ( 10 );
T_c_w_estimated_ = SE3 (
pose->estimate().rotation(),
pose->estimate().translation()
);
cout<<"T_c_w_estimated_: "<<endl<<T_c_w_estimated_.matrix()<<endl;
}
bool VisualOdometry::checkEstimatedPose()
{
// check if the estimated pose is good
if ( num_inliers_ < min_inliers_ )
{
cout<<"reject because inlier is too small: "<<num_inliers_<<endl;
return false;
}
// if the motion is too large, it is probably wrong
SE3 T_r_c = ref_->T_c_w_ * T_c_w_estimated_.inverse();
Sophus::Vector6d d = T_r_c.log();
if ( d.norm() > 5.0 )
{
cout<<"reject because motion is too large: "<<d.norm() <<endl;
return false;
}
return true;
}
bool VisualOdometry::checkKeyFrame()
{
SE3 T_r_c = ref_->T_c_w_ * T_c_w_estimated_.inverse();
Sophus::Vector6d d = T_r_c.log();
Vector3d trans = d.head<3>();
Vector3d rot = d.tail<3>();
if ( rot.norm() >key_frame_min_rot || trans.norm() >key_frame_min_trans )
return true;
return false;
}
void VisualOdometry::addKeyFrame()
{
if ( map_->keyframes_.empty() )
{
// first key-frame, add all 3d points into map
for ( size_t i=0; i<keypoints_curr_.size(); i++ )
{
double d = curr_->findDepth ( keypoints_curr_[i] );
if ( d < 0 )
continue;
Vector3d p_world = ref_->camera_->pixel2world (
Vector2d ( keypoints_curr_[i].pt.x, keypoints_curr_[i].pt.y ), curr_->T_c_w_, d
);
Vector3d n = p_world - ref_->getCamCenter();
n.normalize();
MapPoint::Ptr map_point = MapPoint::createMapPoint(
p_world, n, descriptors_curr_.row(i).clone(), curr_.get()
);
map_->insertMapPoint( map_point );
}
}
map_->insertKeyFrame ( curr_ );
ref_ = curr_;
}
void VisualOdometry::addMapPoints()
{
// add the new map points into map
vector<bool> matched(keypoints_curr_.size(), false);
for ( int index:match_2dkp_index_ )
matched[index] = true;
for ( int i=0; i<keypoints_curr_.size(); i++ )
{
if ( matched[i] == true )
continue;
double d = ref_->findDepth ( keypoints_curr_[i] );
if ( d<0 )
continue;
Vector3d p_world = ref_->camera_->pixel2world (
Vector2d ( keypoints_curr_[i].pt.x, keypoints_curr_[i].pt.y ),
curr_->T_c_w_, d
);
Vector3d n = p_world - ref_->getCamCenter();
n.normalize();
MapPoint::Ptr map_point = MapPoint::createMapPoint(
p_world, n, descriptors_curr_.row(i).clone(), curr_.get()
);
map_->insertMapPoint( map_point );
}
}
void VisualOdometry::optimizeMap()
{
// remove the hardly seen and no visible points
for ( auto iter = map_->map_points_.begin(); iter != map_->map_points_.end(); )
{
if ( !curr_->isInFrame(iter->second->pos_) )
{
iter = map_->map_points_.erase(iter);
continue;
}
float match_ratio = float(iter->second->matched_times_)/iter->second->visible_times_;
if ( match_ratio < map_point_erase_ratio_ )
{
iter = map_->map_points_.erase(iter);
continue;
}
double angle = getViewAngle( curr_, iter->second );
if ( angle > M_PI/6. )
{
iter = map_->map_points_.erase(iter);
continue;
}
if ( iter->second->good_ == false )
{
// TODO try triangulate this map point
}
iter++;
}
if ( match_2dkp_index_.size()<100 )
addMapPoints();
if ( map_->map_points_.size() > 1000 )
{
// TODO map is too large, remove some one
map_point_erase_ratio_ += 0.05;
}
else
map_point_erase_ratio_ = 0.1;
cout<<"map points: "<<map_->map_points_.size()<<endl;
}
double VisualOdometry::getViewAngle ( Frame::Ptr frame, MapPoint::Ptr point )
{
Vector3d n = point->pos_ - frame->getCamCenter();
n.normalize();
return acos( n.transpose()*point->norm_ );
}
}
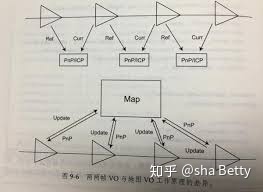
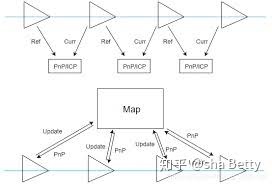
《视觉SLAM十四讲》中对VO中加入地图的阐述:
改进地图:将VO匹配到的特征点放到地图中,并将当前帧与地图点进行匹配,计算位姿。这里的地图是把各帧特征点缓存到一个地方构成的特征点集合。
优势:能够维护一个不断更新的地图。只要地图是正确的,即使中间某帧出了差错,仍有希望求出之后那些帧的正确位置。
局部地图:描述了附近的特征点信息,只保留离相机当前位置较近的特征点,把远的或视野外的特征点丢掉。这些特征点用来和当前帧匹配来求相机位置,所以希望它能够做得比较快。
全局地图:记录了从SLAM运行以来的所有特征点。规模要大一些,主要用来表达整个环境。但直接在全局地图上定位,对计算机的负担太大。主要用于回环检测和地图表达。
视觉里程计中,直接用于定位的局部地图,随着相机运动,往地图里添加新的特征点。是否使用地图取决于对精度-效率这个矛盾的把握。可以出于效率的考虑,使用两两无结构式的VO,也可以为了更好的精度,构建局部地图乃至考虑地图的优化。
局部地图的考验:维护它的规模。为保证实时性,需要保证地图规模不至于太大(否则匹配会消耗大量的时间)。单个帧与地图的特征匹配存在一些加速手段。
地图优化:
删除不在视野内的点,在匹配数量减少时添加新点,等等。
使用三角化来更新特征点的世界坐标,或考虑更好地动态管理地图规模的策略。
特征匹配。匹配之前,从地图中拿出一些候选点(出现在视野内的点),然后将它们与当前帧的特征描述子进行匹配。
关键帧:后端优化的主要对象。每当相机运动经过一定间隔,就取一个新的关键帧并保存起来。这些关键帧的位姿将被优化,而位于两个关键帧之间的那些东西,除了对地图贡献一些地图点外,就被理所当然地忽略掉了。
将局部地图的点投影到图像平面并显示除了。如果位姿估计正确,它们看起来应该像是固定在空间中一样。如果感觉到某个特征点不自然地运动,那可能是相机位姿估计不够准确,或特征点位置不够准确。
地图的优化:用到的原理主要是最小二乘和三角化。
局限:
视觉里程计能够估算局部时间内的相机运动及特征点的位置,但这种局部方式有明显缺点
- 容易丢失。一旦丢失,要么“等待相机转回来”(保存参考帧并与新的帧比较),要么重置整个VO以跟踪新的图像数据。
- 轨迹漂移。主要原因是每次估计的误差会累积至下一次估计,导致长时间轨迹不准确。大一点的局部地图可以缓解这种现象,但它始终是存在的。
如果只关心短时间内的运动,或者VO的精度已经满足应用需求,有时候可能需要的仅仅就是一个视觉里程计,而不用完全的SLAM。
参考文献
高翔《视觉SLAM十四讲:从理论到实践》
参考代码
gaoxiang12/slambook2
gaoxiang12/slambook















 817
817

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









