





咸鱼了好久。。。。起来接着学习。
上来就又被先验后验搞蒙了,重新理解一下:
先验概率:根据以往经验和分析得到的概率,它往往作为“由因求果”问题中的“因”出现。
后验概率:指在得到“结果”的信息后重新修正的概率,是“执果寻因”问题中的“因”。
最大的区别就在于结果/当前观测在后验概率中已知,在先验概率中未知。
1. 后端要做什么?
前端能够根据相邻的两幅图像判断出此时此刻的位姿,是暂时的;那么后端需要对前端测量以及计算的结果进行矫正,不仅用过去的信息,也用未来的信息更新自己,希望能够得到一个长时间的正确状态。
前面有讲过,在运动方程和观测方程中,如果把位姿和路标看成随机变量,就可以把问题变为已知观测数据和运动数据情况下,如何确定状态量的分布问题,是一个状态估计问题。假设噪声和状态量服从高斯分布,只需要估计它的均值和方差,即可确定状态量的分布。
完成后端优化可以使用滤波器,也可以使用非线性优化,本讲对两种方法都做了推导。
2. 滤波器推导
先做一些符号的定义和铺垫:
把位姿和路标写在一起,记为:
需要求解的是后验概率问题,即在已知0时刻的状态、1:k时刻的观测下,k时刻的状态分布,写为
先验概率中k时刻的状态
2.1 卡尔曼滤波器(线性高斯系统)
在线性高斯系统中,用线性方程描述运动方程和观测方程,写为
因为各随机变量服从高斯分布,误差服从零均值高斯分布,根据高斯分布的特性(后面解释)和观测方程、运动方程,可以分别写出似然和先验的分布:
把先验均值和方差记为
根据后验、似然、先验的关系,有:
高斯分布底数为e,比较等式两边的指数项(不考虑常数项)有,
比较两边的系数,经过一系列推导可以得到后验均值和方差的表达式。
整个卡尔曼滤波的过程为:
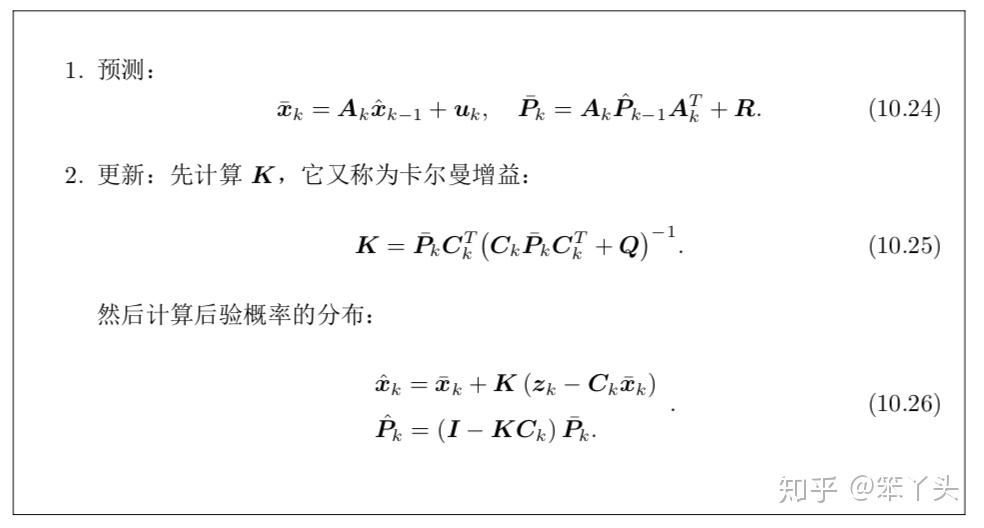
在第一步预测中,使用k-1时刻的后验分布估计k时刻的先验分布,这一步不确定性变大,第二步使用k时刻的先验分布估计k时刻的后验分布,对于结果进行修正,缩小不确定性。
2.2 拓展卡尔曼滤波器EKF(非线性系统)
将线性系统拓展到非线性系统,通常会在某个点处对方程进行展开,保留一阶项,按照线性系统进行推导。
对于k时刻的运动方程,展开有:
对于k时刻的观测方程,展开有:
利用和线性系统类似的方法,推导得到预测步骤(没看明白怎么推的,如有大神请帮忙解释一下):
卡尔曼增益:
更新步骤:
EKF的局限性:马尔可夫假设、一次线性化,这两个数学上的处理化简了问题,但是偏离了实际情况。记录均值、方差、路标等信息,存储量大。
3. 非线性优化(BA与图优化)
Bundle Adjustment,是指从视觉重建中提炼出最优的3D模型和相机参数(内参数和外参数)。
3.1 优化目标
回顾整个投影过程,假设已知相机的外参数(R,t)和世界坐标系的p点坐标,求解p点的像素坐标过程。
世界坐标转化为相机坐标:
相机坐标投影到归一化平面:
去畸变(径向畸变):
计算像素坐标:
整个过程中,用到了相机的位姿(R,t)和路标p的世界坐标,得到了路标的像素坐标,对应到观测方程z=h(x,y)中,观测z就是像素坐标
采用非线性优化更新增量的方式求解,令
引入增量后,目标函数变为:
接下来使用第六章的非线性优化方法进行求解,在求解时不免要计算
3.2 稀疏性
在高斯牛顿法中
对于代价函数中的
由于
举例说明,假设有2个相机位姿
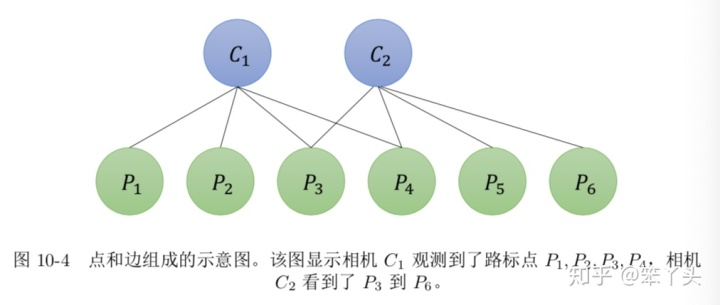
图10-4的场景,用目标函数表示应该是:
其中
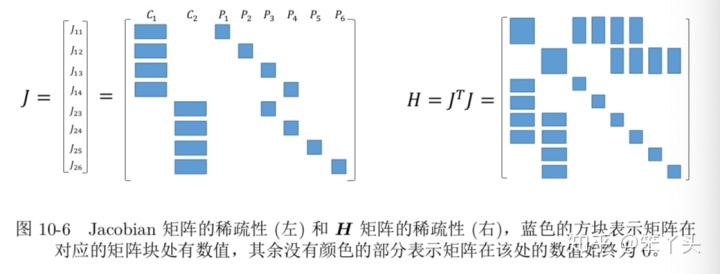
每个非零块都对应着相机和路标点的关系,拓展开来,可以把H矩阵划分成四个区域,如图10-9所示。
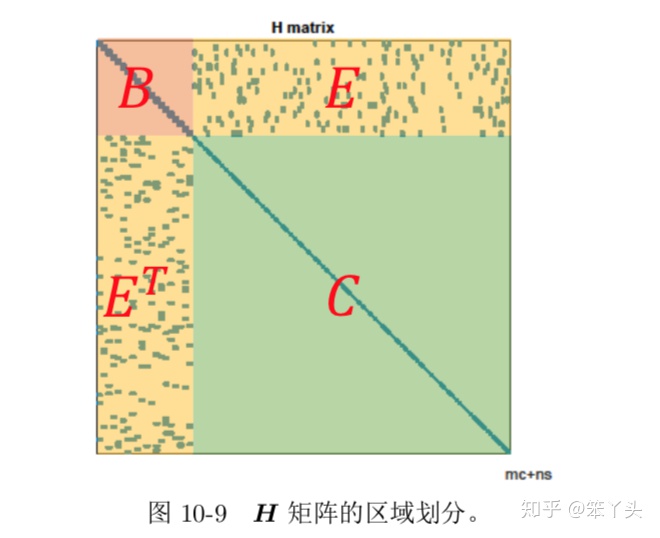
其中BC是对角块矩阵,B的对角块与相机位姿的维度相同,C的对角块与路标维度相同,E的数值和具体的观测相关。
3.3 边缘化(Marginalization)
把相机位姿变量放到一起,记为
在非线性优化中,需要根据
先消去右上角的E:
整理得到
用第一行计算出
3.4 鲁棒核函数
当输入的数据存在无匹配时,误差会很大,在二范式中产生的梯度也会很大,从而导致增量朝着错误的方向变化。选用一个具有光滑性质并且变化较小的函数可以使得系统更稳健,这种函数称为鲁棒核函数,比如Huber核:
附录A.3
高斯函数性质:
对于随机变量
参考文献
[1] 《视觉SLAM十四讲从理论到实践》 高翔,张涛















 4535
4535











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









