





对偶四元数
单位对偶四元数,刚性3D转换,螺旋
相比于单位四元数,其能够描述3D转换,一个单位对偶四元数则是相对于描述3D刚性转换的3D位姿和3D齐次转换矩阵的另一种描述。相比于12个元素的转换矩阵,具有8个元素的对偶四元数则是一个更加紧凑的描述。类似于转换矩阵,对偶四元数可以很容易的被组合去连接多个转换。还有,它们允许在2个3D刚性转换之间有一个平滑的差值和3D线的有限转换。
对偶四元数的介绍
一个对偶四元数

由两个四元数

和

组成,其中

是实部,

是个对偶部,

是一个对偶单位数。每一个四元数

由一个标量

和向量

组成,其中

是四元数向量空间的基元素。
用HALCON来描述对偶四元数
在HALCON中,一个对偶四元数用一个8个值得元组

来描述,其中

和

是实部的标量和向量部分,

和

是对偶部的标量和向量部。
每一个3D刚性转换可以用一个螺旋来描述(见图1和图2)。
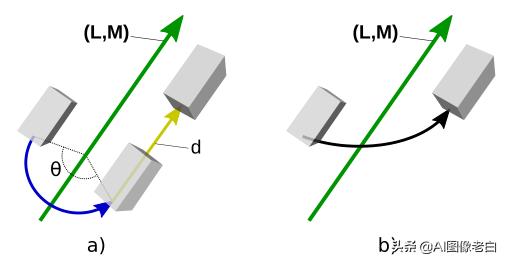
图1: a)被一个旋转和一个平移定义的3D刚性转换… b)用 一个螺旋来描述
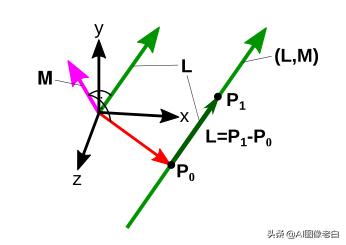
图2: 螺旋轴的动量M
完全描述螺旋的参数是:
- 螺旋角度
- 螺旋平移
- 螺旋轴的方向,其中
- 螺旋轴的动量,其中
一个螺旋是由L和M给出的螺旋轴旋转角度

和沿着此轴平移d来组成的。螺旋轴的位置用相对于坐标系统的原点的动量来定义。M是一个垂直于螺旋轴L和垂直于原点到螺旋轴上点

向量的一个向量,其可以通过向量积

来被计算。
因此,M是一个由螺旋轴和原点张成的平面的标准向量。值得注意的是

是螺旋轴

上距离坐标系统原点最短距离的点。一个单位对偶四元数的元素是有关于3D刚性转换的螺旋参数:
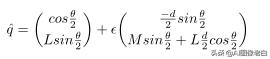
注意的是,

和-
描述的是相同的3D刚性转换,还有一个单位对偶四元数的反转是其共轭。
HALCON算子
- Pose_to_dual_quat将3D位姿转化为单位对偶四元数
- Dual_quat_to_pose将对偶四元数转化为3D位姿
- Dual_quat_compose将两个对偶四元数相乘
- Dual_quat_to_screw将单位对偶四元数转化为螺旋
- Screw_to_dual_quat将螺旋转化为对偶四元数
- Dual_quat_to_hom_mat3d将单位对偶四元数转化为齐次转换矩阵
- Dual_quat_conjugate共轭一个对偶四元数
- Serialize_dual_quat序列化一个对偶四元数
- Deserialize_dual_quat反序列化一个被序列化的对偶四元数















 1474
1474











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









