







树莓派是当今最流行的Linux开发板之一,也是性价比之最。因为价格实惠,所以几乎所有学习Linux的同学都会备一套。但是,和其他开发板一样,如果没有好玩的项目可以做,基本上到手没多久就会压箱底啦。所以为了让大家压在箱底吃灰的树莓派能重见天日,我们特地做了一期教程,介绍如何在树莓派环境下,对接上我们的XECU控制器。
一、在树莓派上安装ROS
因为XECU控制器是基于ROS接口的,所以第一步我们需要在树莓派上安装ROS。我们使用的树莓派是Raspberry Pi 3b+,其他版本的树莓派同样可以参考。
系统及ROS安装方法主要有3种,我们推荐使用方法1的方式安装。
1.下载ROS网站提供自带ROS的镜像文件。
该镜像文件是基于Ubuntu 16.04 (LXDE) 和 ROS Kinetic,安装完成后启动系统,ros core已经在后台运行。
(下载地址为:https://downloads.ubiquityrobotics.com/pi.html)
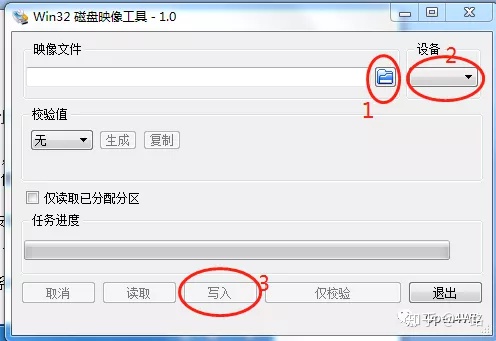
Windows下Raspberry Pi 3b+ 安装系统推荐使用Win32DiskImager,选择镜像和设备,按提示完成安装,如图:
完成安装后系统启动界面:

Ubuntu下给Raspberry Pi 3b+ 安装系统推荐使用gnome-disk-utility 工具,Ubuntu系统默认自带该工具,如果没有可以通过sudo apt installgnome-disk-utility来安装,先将启动卡格式化,然后再写入镜像。
2.分开安装Ubuntu mate系统和ROS。
下载Ubuntu mate 系统镜像,首先安装Ubuntu mate,安装完成后启动系统,连接网络后,在线安装ROS(可参考ROS网站用户指导);
Ubuntu mate 下载地址为:
https://ubuntu-mate.org/download/;
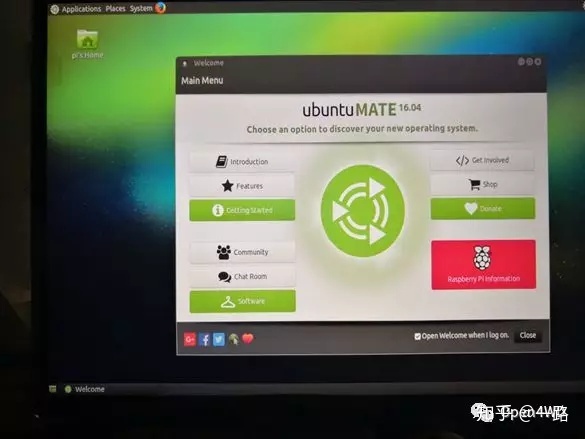
(注意:安装Ubuntu mate时不能用Raspberry网站提供的连接去下载镜像,由于boot的差异,该连接的镜像只能在Raspberry 2上使用)。完成安装后系统界面如图:
3.安装Raspbian系统和ROS。
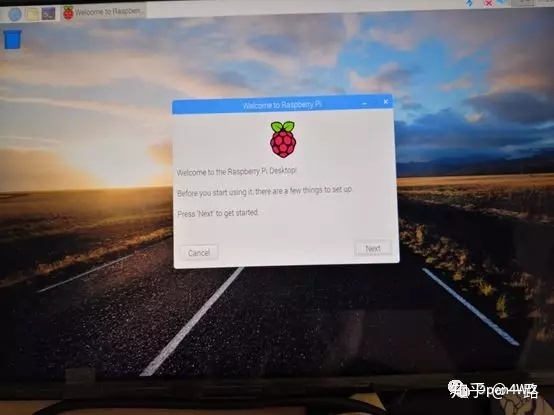
下载Raspbian安装包NOOBS,该安装包已经包含完整的Raspbian系统,直接解压到启动卡的根目录,解压完成后启动Raspberry ,按照提示完成安装,Raspbian系统下不能直接在线安装ROS,只能下载源码编译安装.源码下载过程可能会出现下载失败的情况,所以不建议使用该方法来安装。完成安装系统启动界面如下:
二、XECU ROS驱动包编译
1.创建ROS编译目录
mkdir –p ~/catkin_ws/src/2.初始化ROS编译空间
cd ~/catkin_ws
catkin_make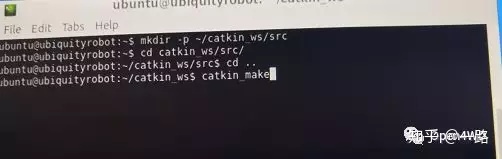
3.下载XECU ROS驱动包
cd ~/catkin_ws/src
git clone https://git.coding.net/open4wd/xecu.git
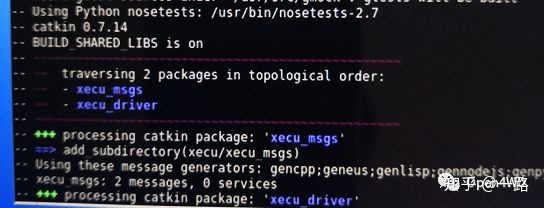
4.编译XECU ROS驱动包
cd ~/catkin_ws/执行:
catkin_make会看到xecu_msgs和xecu_drive两个包会被编译
5.编译完成后,就可以运行XECU的ROS驱动,在catkin_ws目录下执行(运行前请确认usb串口已经接入)
source /devel/setup.bash
roslaunch xecu_driver xecu_driver node.launch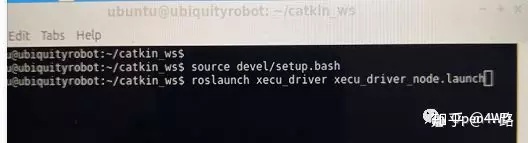
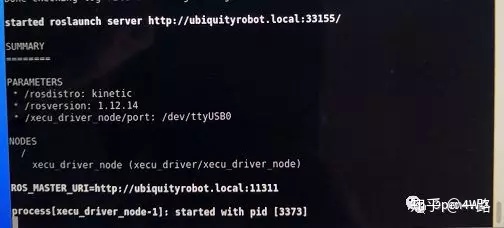
6.执行上述5后,成功启动XECU ROS驱动后,会看到如下信息
三、XECU ROS测试代码运行
.在下载的驱动包中有一个test目录,里面含有2个测试文件,分别测试速度和角度。
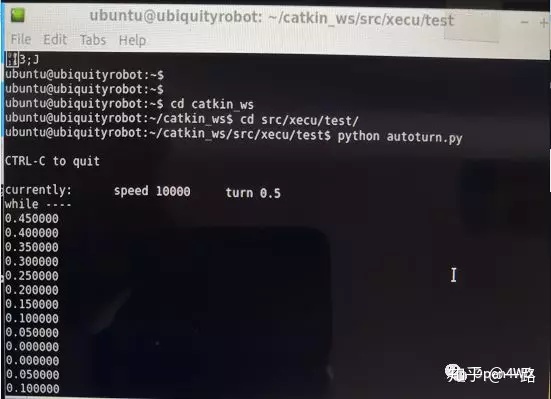
2.舵机测试:
cd ~/catkin_ws/src/xecu/test
python autoturn.py运行测试程序后会看到如下输出,此时舵机会左右转向。
3.电机测试(方法和舵机类似):
cd ~/catkin_ws/src/xecu/test
python autospeed.py如果大家能顺利跑到这里,那就恭喜大家已经入门XECU控制器啦!
后面请尽情Enjoy。。。

















 820
820

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









