






 本文详细解析了FANUC机器人的iRVision功能,包括2.5D视觉堆垛、浮动坐标系、多窗口检测和长度计测等,展示了如何借助视觉技术提升机器人在堆垛、定位和质量检测等任务中的精度和效率。
本文详细解析了FANUC机器人的iRVision功能,包括2.5D视觉堆垛、浮动坐标系、多窗口检测和长度计测等,展示了如何借助视觉技术提升机器人在堆垛、定位和质量检测等任务中的精度和效率。

点击上面“蓝字”关注我们

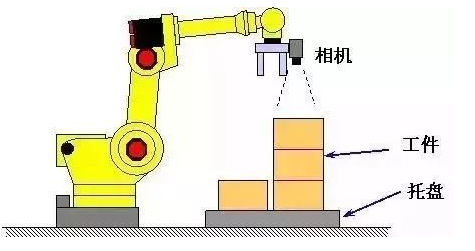
iRVision 2.5D 视觉堆垛
视觉堆垛程序通过相机视野内目标比例的变化来估算目标的高度并引导机器人的运动补偿目标的偏移,不但包括X轴,Y轴和X-Y平面旋转度R,也同时包括Z轴。
使用iRVision 2.5D允许机器人只借助一个普通2D相机来拾取码放堆集的目标。
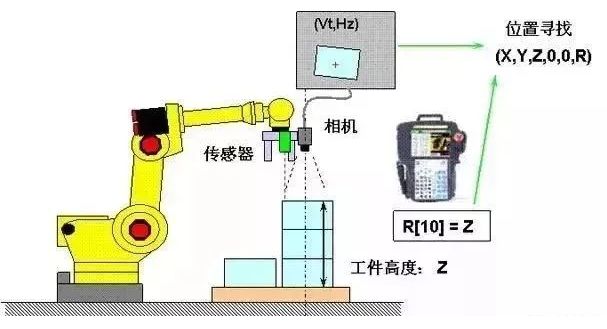
iRVision 视觉堆垛程序_1 (从寄存器R提取Z轴偏移)
此功能通过视觉计算寻找目标的2D位置和指定的寄存器数值,并引导机器人的运动补偿目标的偏移,不但包括X轴,Y轴和X-Y平面旋转度R,也同时包括Z轴。寄存器R被用作存储已知的目标Z轴高度,或者通过距离传感器检测出的Z轴高度信息。
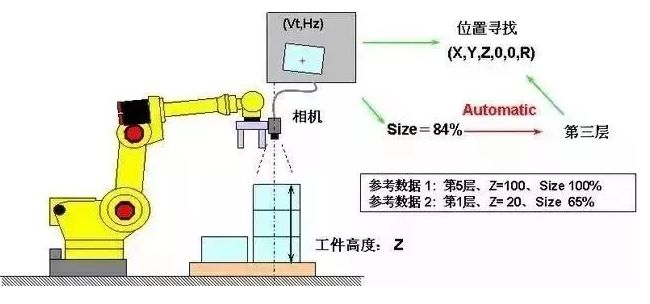
iRVision 视觉堆垛程序_2 (从堆垛层数提取Z轴偏移)
此功能通过视觉结合视觉检测结果和根据目标比例确定的目标层数(目标高度)计算目标的位置。目标层数依照参考比例和高度数据自动确定,因而,即使在视觉检测中存在细微的比例误差,也可以通过一个离散的层数(目标高度)来计算目标的具体位置。
iRVision 2DV 复数视野功能
2D复数视野程序提供通过若干固装式照相机定位大型目标的能力,对通过Robot-Mounted式照
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1180
1180











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









