






 视觉检测(FANUC)与OFFSET补偿方式分类 现在视觉软件根据现场应用需求机器人公司一般开发了很多版本,不同版本的功能有所区别,一般分为三类检测方式可以满足实际应用,主要有三个类别2D视觉检测,2.5D视觉检测以及和D视觉检测。在应用选型时需要自己选择合适的功能版本。(1)2D 只用于检测平面移动的目标 (XY 轴位移、Z 轴旋转角度 R)。如图(左一)(2)2.5D...
视觉检测(FANUC)与OFFSET补偿方式分类 现在视觉软件根据现场应用需求机器人公司一般开发了很多版本,不同版本的功能有所区别,一般分为三类检测方式可以满足实际应用,主要有三个类别2D视觉检测,2.5D视觉检测以及和D视觉检测。在应用选型时需要自己选择合适的功能版本。(1)2D 只用于检测平面移动的目标 (XY 轴位移、Z 轴旋转角度 R)。如图(左一)(2)2.5D...
视觉检测(FANUC)与OFFSET补偿方式分类
现在视觉软件根据现场应用需求机器人公司一般开发了很多版本,不同版本的功能有所区别,一般分为三类检测方式可以满足实际应用,主要有三个类别2D视觉检测,2.5D视觉检测以及和D视觉检测。在应用选型时需要自己选择合适的功能版本。
(1) 2D 只用于检测平面移动的目标 (XY 轴位移、Z 轴旋转角度 R)。如图(左一)
(2) 2.5D 除检测目标平面位移与旋转外,还可以检测 Z 轴方向上的目标高度变化。如下图(中间)
(3) 3D 用于检测目标 3 维内的位移与旋转角度变化。如下图(右一)
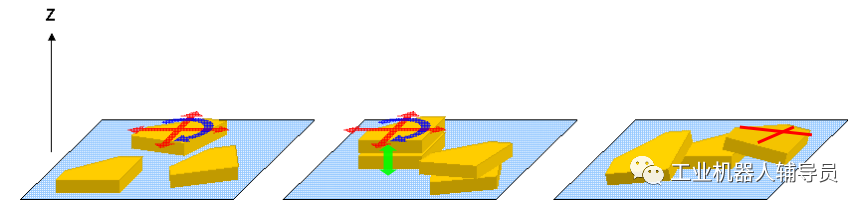
备注:除3D外,其他2D和2.5D在 目标XY 轴方向上的旋转角度不会被计算在内。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1818
1818











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









