







 本文档介绍了如何配置Fanuc机械手臂控制器与基恩士(Keyence)视觉系统的通讯。步骤包括选择TCP/IP协议,设定IP地址、子网掩码和路由器IP,以及在客户端设置服务器IP和端口,确保两者在同一网络内通信。
本文档介绍了如何配置Fanuc机械手臂控制器与基恩士(Keyence)视觉系统的通讯。步骤包括选择TCP/IP协议,设定IP地址、子网掩码和路由器IP,以及在客户端设置服务器IP和端口,确保两者在同一网络内通信。
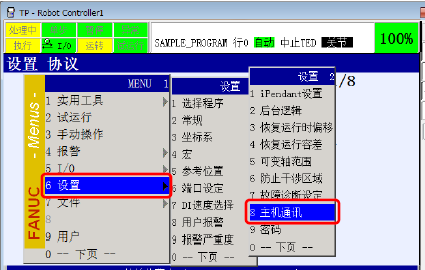
1. 按下教学模式辅助控制器(示教操作盘)的“选择画面”按钮。
2. 从显示的菜单中,选择“MENU1”-“设置”>“设置2”-“主机通讯”。
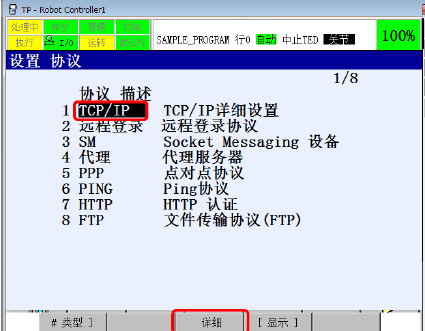
3. 在显示的“设置协议”画面中,选择“TCP/IP”后按下“详细”。
4. 分别选择“端口#1 IP地址”“子网掩码”“路由器IP地址”并按下“输入”按钮,输入机械手臂控制器的通讯设定。
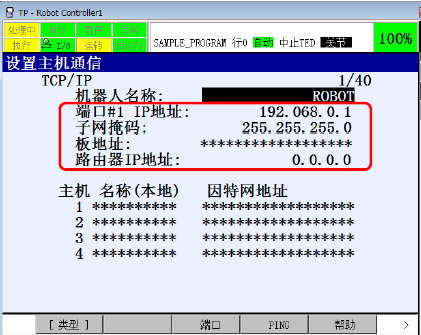
设定示例:端口#1 IP地址:192.168.0.1
子网掩码:255.255.255.0
路由器IP地址&#
1. 按下教学模式辅助控制器(示教操作盘)的“选择画面”按钮。
2. 从显示的菜单中,选择“MENU1”-“设置”>“设置2”-“主机通讯”。
3. 在显示的“设置协议”画面中,选择“TCP/IP”后按下“详细”。
4. 分别选择“端口#1 IP地址”“子网掩码”“路由器IP地址”并按下“输入”按钮,输入机械手臂控制器的通讯设定。
设定示例:端口#1 IP地址:192.168.0.1
子网掩码:255.255.255.0
路由器IP地址&#

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





 订阅专栏 解锁全文
订阅专栏 解锁全文


















 4868
4868







