





下载autoware主要是为了看它的架构及相应的模块源代码,最新的代码是在ubuntu18.04上的,无奈自己已经在ubuntu16.04用了好几年了,所以找个ubuntu16.04的版本.
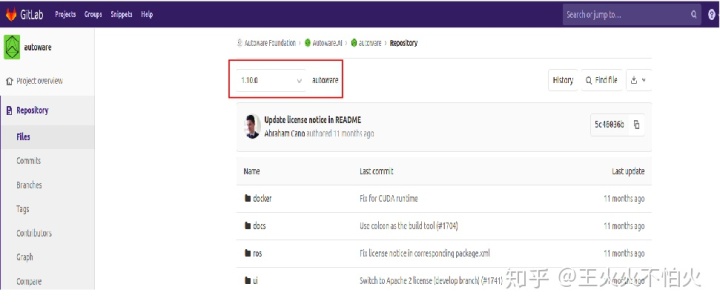
autoware现在已经迁移到了gitlab上.
1.根据autoware的1.10.0版本安装要求,ubuntu16.04需要安装ros-kinetic,qt5.2.1以上,可以选安装cuda(我没装)
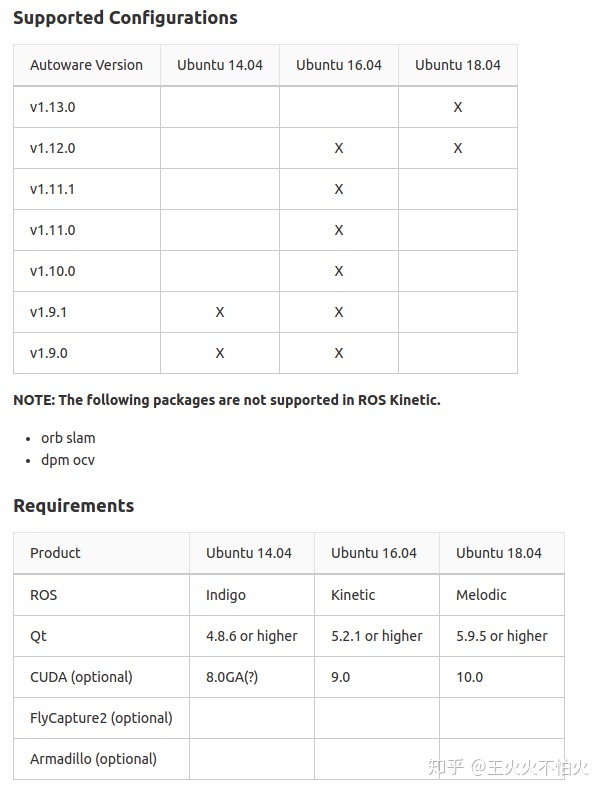
2. 1.10.0的版本安装上有写ubuntu16.04的安装依赖,由于后面是使用catkin_make编译的,所以可以不用安装colcon等依赖,直接全部略过.

3.安装要求我使用git拉下来,但是拉下来后,在git checkout的时候提示为指针分离,乱七八糟的,所以直接选择1.10.0版本的代码download下来.
4.假设你已经把1.10.0版本的代码解压缩在$HOME目录下,即~/autoware-1.10.0
$ cd ~/autoware-1.10.0/ros #进入到ros文件夹下
$ rosdep update
$ rosdep install -y --from-paths src --ignore-src --rosdistro kinetic #安装ros依赖
$ ./catkin_make_release #使用catkin_make编译5.编译成功后,根据官方教程下载map和bag,进行quick start,两个包大小一共为3G,提供了一个谷歌镜像.
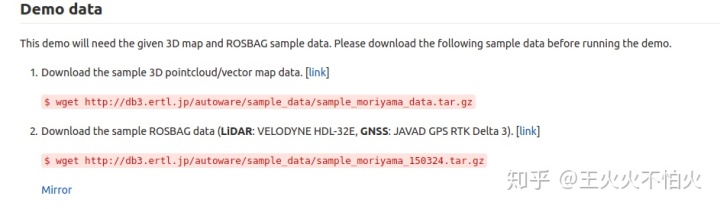
6.下载完后解压缩到.autoware文件夹(没有的自己在$HOME目录下创建)
$ cd ~
$ mkdir .autoware
$ cd .autoware
$ cp ~/Downloads/sample_moriyama_* . #把download下载的压缩包复制到.autoware文件夹下
$ tar zxfv sample_moriyama_150324.tar.gz #解压缩
$ tar zxfv sample_moriyama_data.tar.gz
$ cd autoware/ros
$ source devel/setup.bash
$ ./run7.这里是quick start的youtube视频教程,新手教程还不错,推荐看下.
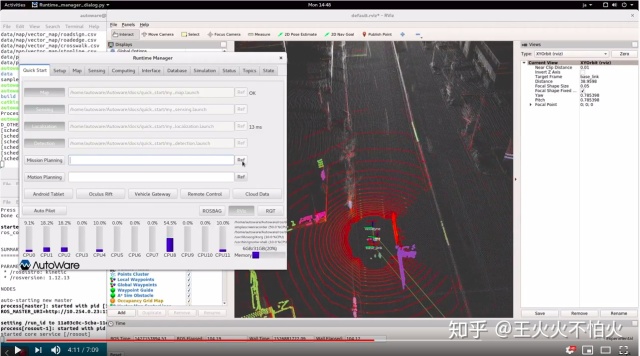
PS:1.好像quick start有bug,要严格按照视频教程的操作顺序,pause,stop等等,还要留一点系统反应时间,加载topic进去,否则加载太快可能会崩.
2.每次加载后,运行的效果都不一样,可能是后台每次算的起始状态都不同,需要一定时间进行匹配
3.目前无法实现mission_planning和motion_planning的加载,尚未解决.
4.rviz的配置每次编辑后默认是保留的,如果改乱了,可以到代码库里单独下rviz文件














 2896
2896











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









