






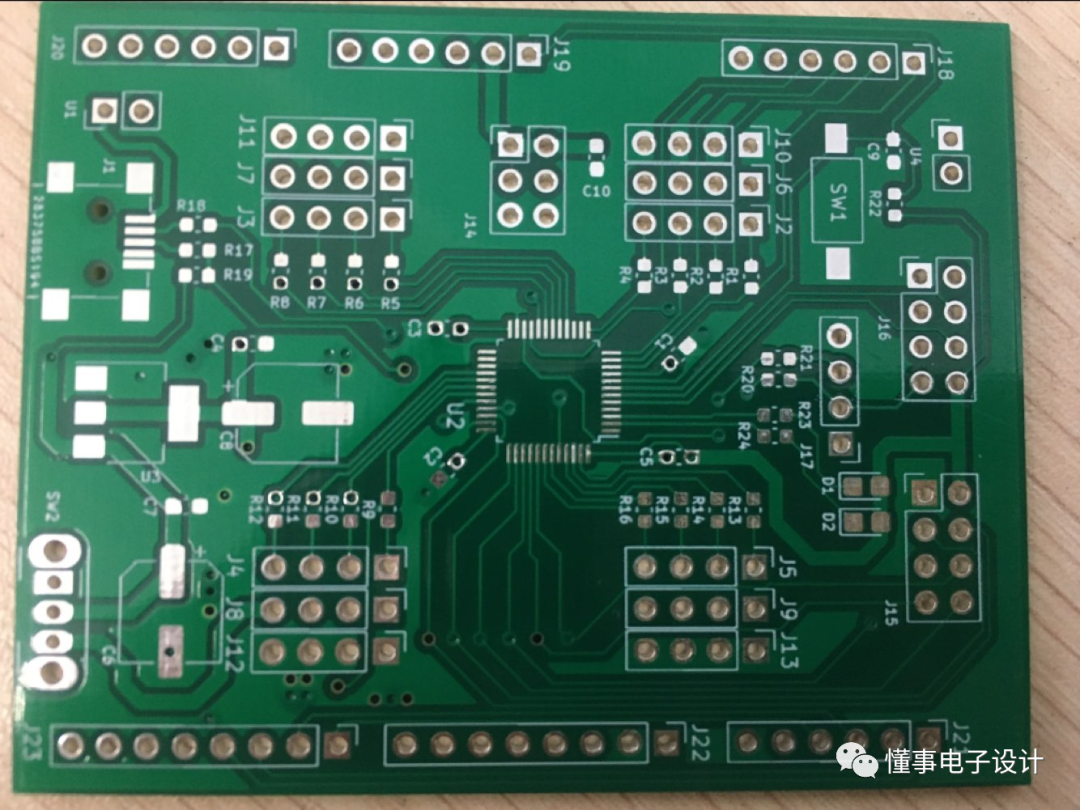
这里分享一个近期做的一个舵机控制板。简单粗暴先上个样板图。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 3万+
3万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









