







前言
本文旨在记录旋转的问题,旋转存在两种情况:
1.点绕点旋转;
2.平面绕轴旋转;
区别:
点绕轴旋转:坐标系不动,点动;
平面绕轴旋转:点不动,坐标系动;
两者一般是变换矩阵中内部符号的变化,极易混淆。
可参考:
1.https://www.cnblogs.com/kljfdsa/p/9084598.html
2.全篇可参考:
https://blog.csdn.net/hbsyaaa/article/details/107853412
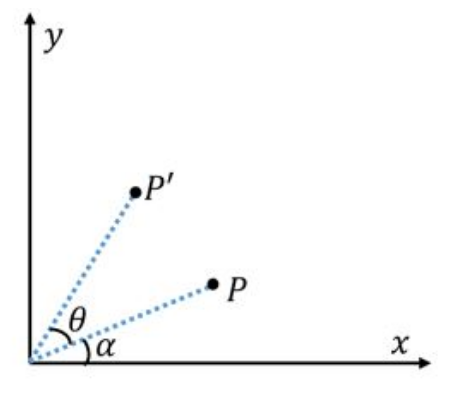
一、点绕点旋转
可参考:
https://blog.csdn.net/Tangyongkang/article/details/5484636
https://www.cnblogs.com/kljfdsa/p/9084598.html
1.二维平面

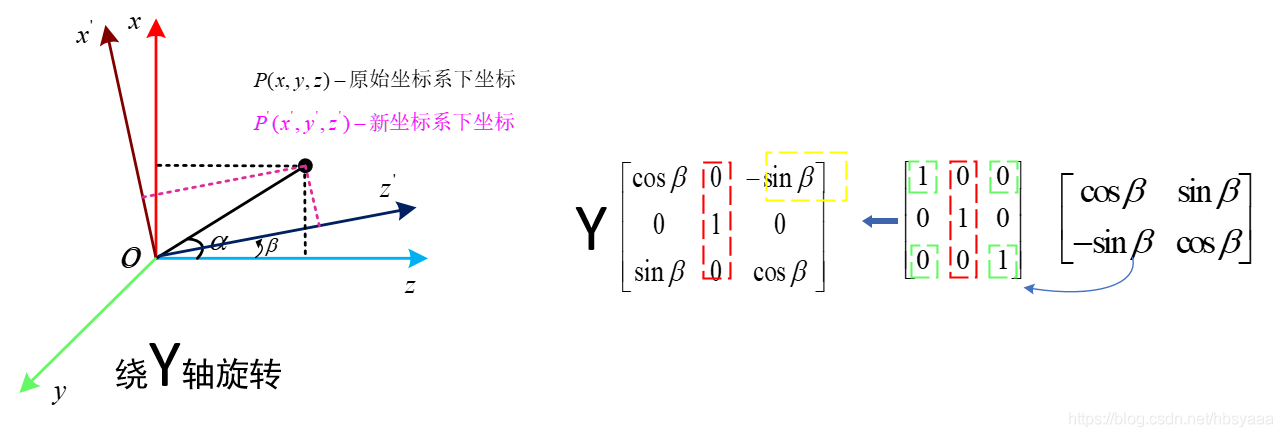
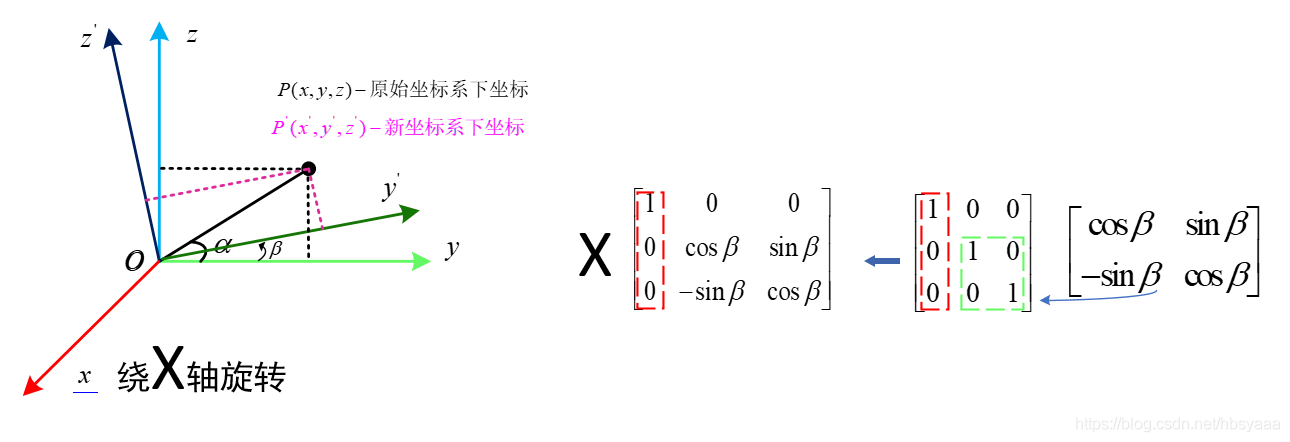
2.三维平面(点绕轴旋转)

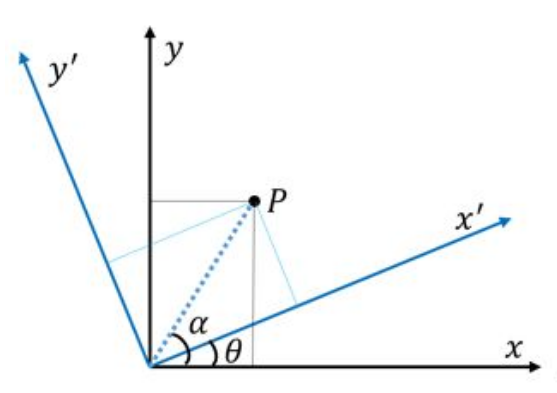
# 二、平面绕轴旋转 可参考:
https://blog.csdn.net/tercel_zhang/article/details/79713644
https://blog.csdn.net/hbsyaaa/article/details/107853412
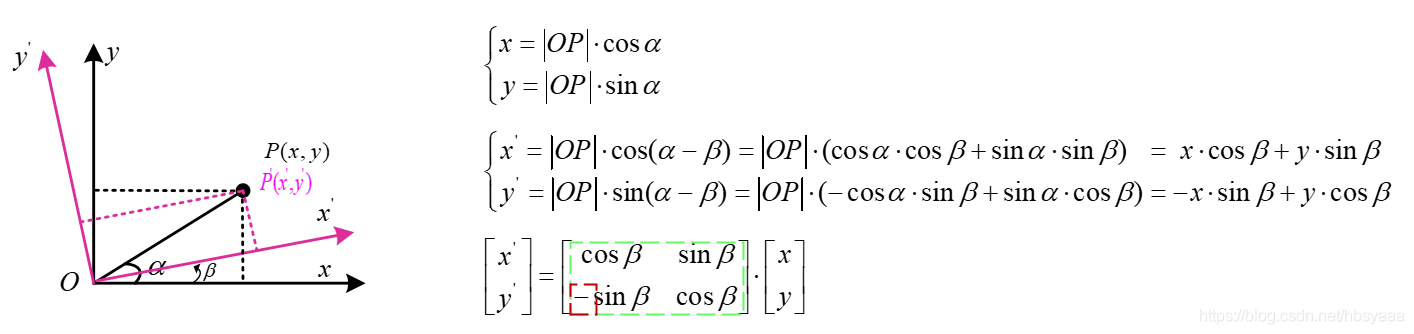
1.二维平面
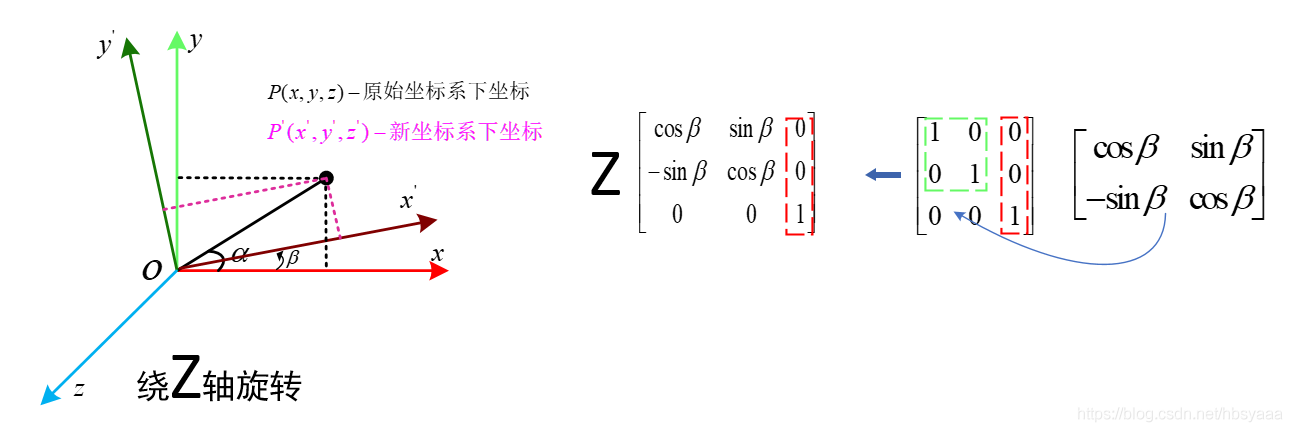
2.三维平面
1.无论是二维坐标系,还是三维坐标系:
顺时针方向旋转角度取负,逆时针方向旋转角度取正;
在运算时,我们将角度作为一个标量(绝对值)计算出来,然后将方向考虑进去,替换掉贝塔即可;
2.在C++编程时,cos(贝塔) 、sin(贝塔)中的“贝塔”不是0~360这样的角度,而是弧度;其中:弧度=π*角度/180;
应用
绕z轴旋转:
















 514
514











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









