






机器人开发过程中,对于直流电机来说,编码器至关重要,它不仅可以使我们对电极进行精确的速度闭环,位置闭环,还可以通过时间积分,根据运动学关系,获得速度、位置等信息
STM32的定时器有编码器模式,大大的方便我们的开发
使用STM32cubeMX配置工具,使得这个过程变得无比简单
我使用STM32cubeMX 开发一个机器人中 使用两个定时器TIM3 和TIM4编码器模式读取编码器的值,做闭环控制
STM32定时器编码器模式(Encoder Mode)
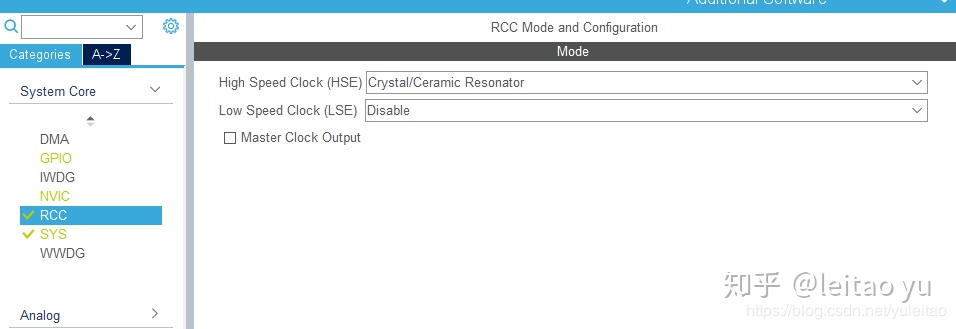
CubeMX配置过程
选择芯片过程不再赘述
RCC: HSE高速总线始终改为外部晶振
SYS: DEBUG选择 SW模式

TIM3 TIM4 配置成定时器模式 Combined Channels: Encoder Mode
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 756
756











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









