





本讲介绍线性控制系统的分类和对控制系统基本要求;
什么是线性控制系统?
线性系统是可以用线性微分方程或线性差分方程来描述的系统;
用线性微分方程描述的系统叫做线性连续系统,

用线性差分方程描述的系统叫做线性离散系统;

当线性微分方程的系数是常数时,称为定常、时不变系统;
当线性微分方程的系数随时间变化时,称为时变系统;
线性系统的线性具有什么物理意义?或者说线性系统与非线性系统的区别是什么?
假设一个A系统的方程为y=x2,输入信号为x1和x2,输出信号为y;
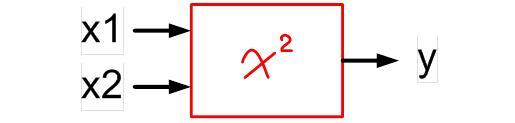
那么,当给系统同时输入两个信号x1和x2,系统的输出值为,

而当输入信号单独作用于系统的时候,系统的输出值分别为y1= x12, y2= x22,那么,两个信号同时输入系统时,系统的输出值y不等于信号单独输入系统时输出值y1+y2;那么,称这个系统是非线性系统;
再看一下b系统:y=x/+x;
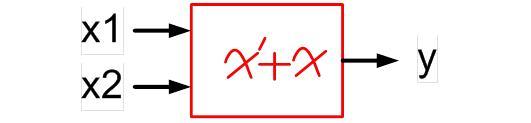
而对于这个系统,当输入信号x1和x2同时作用于系统的输入时,系统的输出
Y=( x1/+x1)+( x2/+x2),当输入信号x1和x2单独作用于系统时,系统的输出值分别为
y1= x1/+x1和y2= x2/+x2;
因此,两个信号作用于系统的输出等于两个信号单独作用于系统时所对应的输出值相加之和;这种系统在数学上满足加减运算和数乘运算,具有线性代数特点,因此称这个系统是线性系统;线性系统与非线性系统的本质区别是线性系统满足叠加原理,非线性系统不满足叠加原理; 在线性系统方程中不含有变量及其导数之间的任何乘积选项,即不含有变量或导数的大于1次幂的成分,或变量与导数的乘积成分;

这个微分方程公式中,含有变量与导数的乘积项,也有变量的2次幂项,因此它不是线性系统;
线性微分方程,线性离散方程,定常系统,时变系统,这些基本的术语要记住
线性定常系统按输入量的变化规律可分为恒值控制系统,随动控制系统,程序控制系统;
1)什么是恒值控制系统?
先来看一下锅炉液位控制系统图;
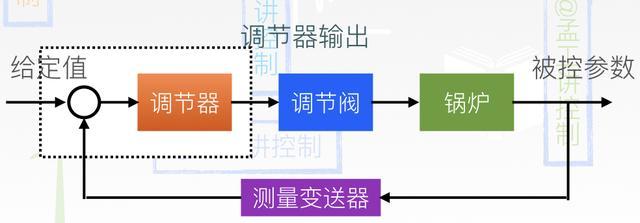
参据量,就是给定值,给定值在自动控制原理中的专业术语是参据量。输出为被控参数液位,测量变送器为差压变送器,用来测量液位并转换为电压信号输出给调节器,调节器将测量液位与给定液位进行比较,得到偏差值,然后根据偏差反向调节阀门,达到被控量与参据量相等的目的;
当给定液位值是常数时,这类控制系统叫做恒值控制系统;
而且,被控量最终也等于给定液位常数值,这类系统给定多少就输出多少,类似一个可以调节输出大小的元器件,因此,也称恒值控制系统为调节器;
一般,涉及到温度,压力,流量,液位等方面的控制系统都是恒值控制系统;
在工业控制中,也把这些生产过程参量的控制系统称为过程控制系统;
恒值控制系统中,被控量与参据量相等,因此对恒值控制系统的设计重点是研究扰动对被控对象的影响及抗扰动的措施;当扰动引起被控量偏离了参据量,使得参据量与被控量之间产生了偏差,控制系统便根据偏差产生控制作用,让被控量恢复到给定的常值;
2)随动控制系统;
随动控制系统的特点是参据量是预先未知的随时间任意变化的函数,要求被控量以尽可能小的误差跟随参据量的变化,因此又称为跟随系统;典型的随动控制系统有军用雷达,导弹,它们跟踪的目标一直在变化,还有电力设备有源滤波器APF,它是用来补偿电网电流中谐波电流的设备,电网中负荷种类繁多,负荷工况变化具有随机性,使得APF的跟踪目标具有随动特点;
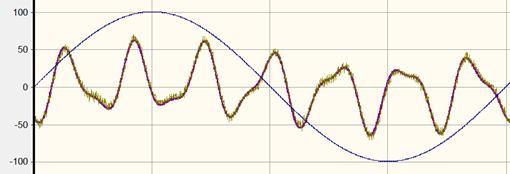
这个图说明了APF补偿电网电流中所包含的7次谐波和13次谐波情况,蓝色曲线为补偿后的纯正弦的基波电网电流,黄色比较嘈杂的波形是APF发出的补偿谐波波形,该波形是7次和13次谐波的叠加合成波形;补偿波形中,夹杂的紫色波形是给定的负载中包含的谐波电流波形;从补偿效果看,APF能够完全的跟踪给定谐波电流波形;
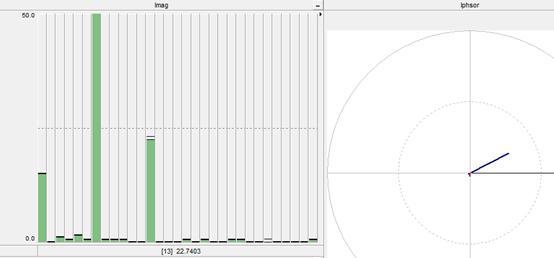
这个图说明了APF发出的电流波形中所包含的各次谐波振幅和向量关系图:反应了APF输出补偿谐波和干扰谐波的成分;从图上看,发出的干扰谐波还是比较小的;
如果被控量是电动机的角度和角速度,这类系统称为伺服系统;比如纯电动汽车电机控制系统,雷达跟踪转向系统等;
随动系统研究的重点是被控量跟随的快速性和准确性,扰动影响的研究是次要的;
3)程序控制系统
这类控制系统的参据量是按预定规律随时间变化的函数;要求被控量迅速准确的加以复现;
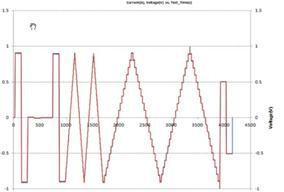
程序控制系统在工业上应用范围非常广泛,比较典型的应用场景是工业加热炉,设置好一套时间-温度曲线,调节器就按照预定的设定程序控制炉内温度;现在非常火热的新能源动力电池测试设备也是典型的程序控制系统,它通过程序设定电池充放电倍率和时间,调节器按预定的程序控制直流DCDC对电池进行充放电控制;
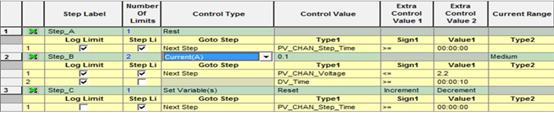
程序控制系统与恒值控制系统的区别是恒值控制系统的参据量是人为预先设定的,设备运行中基本不变,而程序控制系统的参据量是计算机给定,系统按照预先设置好的参据量进行控制;因此恒值控制系统可以认为是程序控制系统的特例,程序步长只有一步;
程序控制系统与随动控制系统的区别是程序控制系统的参据量是已知时间函数,而随动控制系统的参据量是未知的任意时间函数
控制系统基本要求:
1. 稳定性:
对于一个控制系统,稳定性是根本根本要求,如果系统不稳定就称不上控制系统;
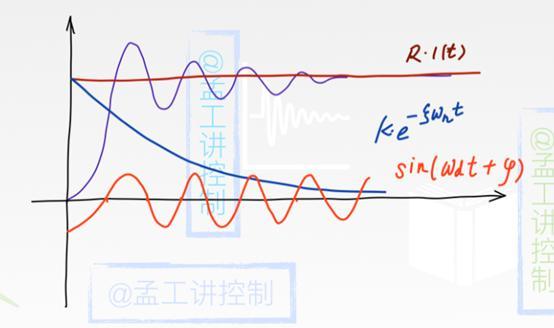
控制系统稳定性是由系统内部结构决定的,不受外界因素影响;稳定的系统输出值中震荡分量的系数一定是按指数形式衰减震荡,即要求系统特征根具有实部小于零的特性,也就是特征根必须位于s平面的左半平面;在经典控制理论所研究的分析方法中,基本上可以归结为找s左半平面极点的问题;
2. 快速性:
快速性要求控制系统的动态响应时间短,震荡幅度小;比如著名的战斗机眼镜蛇动作,对飞机的快速爬升控制要求极高;
3. 准确性:
准确性要求控制系统输出值误差范围小;比如,防空导弹拦截系统,对目标跟中精度误差要求高;低精度的制导控制系统无法实现准确拦截导弹;

实际工业控制中,对控制精度和速度要求不高的场合,可考虑成本因素适当降低动态性能;














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









