






上一节我们介绍了目标跟踪中最常用的方法——光流法。
Encoder:【计算机视觉】3. 目标跟踪:光流法zhuanlan.zhihu.com
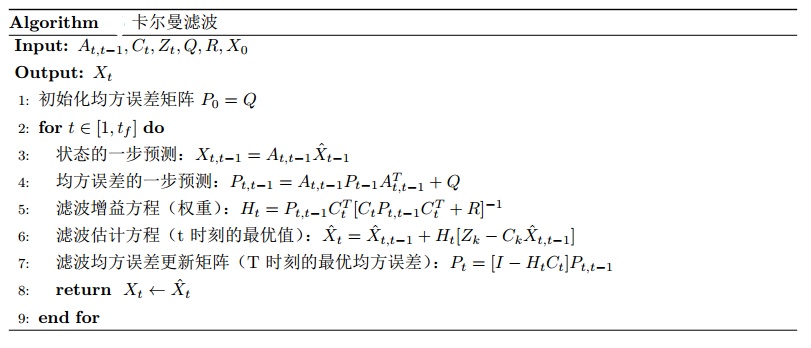
目标跟踪需要在包含噪声的观测序列中估计时变系统的状态,这种估计称为滤波估计。滤波估计中最经典的算法就是卡尔曼滤波,本文对其原理进行介绍。
最小二乘意义下的卡尔曼滤波
希望知道变量X在t时刻的值
对零输入线性系统

上一节我们介绍了目标跟踪中最常用的方法——光流法。
Encoder:【计算机视觉】3. 目标跟踪:光流法zhuanlan.zhihu.com
目标跟踪需要在包含噪声的观测序列中估计时变系统的状态,这种估计称为滤波估计。滤波估计中最经典的算法就是卡尔曼滤波,本文对其原理进行介绍。
希望知道变量X在t时刻的值
 960
1万+
960
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章





















