





SURF特征点检测
SURF特征点检测是另一种比较好的特征点检测算法。相对于SIFT算法而言,SURF算法的速度要快很多。算法全称叫speed up robust feature,即快速鲁棒特征。其实,该算法是从SIFT算法改进而来。SIFT算法检测特征点速度太慢,而且特征点的描述算子太过复杂。SURF主要改进了特征点的检测方法和特征点描述算子。
在SURF算法中,采用Hessian矩阵生成所有的感兴趣点。Hessian 矩阵是一个多元函数的二阶偏导数构成的方阵,描述函数的局部曲率。通过判定当前点是比周围邻域内其他点更亮或更暗的点,由此来定位关键点的位置。在特征点描述算子方面,SURF采用的是统计特征点圆形邻域内的harr小波特征。如果有兴趣对特征点进行研究并改进,建议对SIFT算法和SURF算法进行仔细研究。在此就不具体说两种算法的详细方法了。
图像的特征点具有很多应用,比如目标跟踪,基于特征点的匹配等。比较常用的Hausdorff距离匹配,其实就是根据特征点进行的匹配。在做图像模板匹配的时候,由于基于灰度图的匹配往往不够准确,前面说过可以采用基于边界的模板匹配。但是,这种匹配方法不具有旋转性。如果要具有旋转不变性,其实还可以采用基于特征点的匹配,这就是Hausdorff距离匹配,hausdorff距离匹配的方法通常采用SURF特征点来实现。毕竟在视觉处理中,算法的速度是很关键的因素。但是,采用这种基于特征点的匹配方式也有一个缺陷,就是要保证图像足够大,才能提取到特征点。而通常我们在做视觉图像处理的时候,为了保证运行速度,只选择一小块ROI区域进行处理,这时候如何保证提取到足够多的特征点也是一个问题。所以,这是一对矛盾体,不能两者兼顾。
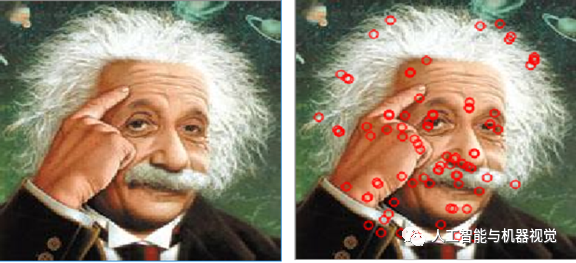
图1 SURF特征点检测
SURF算法在opencv里面也已经实现了。下面以具体的代码来看下怎么应用该算法。如果想详细了解该算法的原理,请在网上查阅相关的资料,在此就不详述了。以下代码在opencv4.0.1上调试通过,将对应的图像文件名改为自己电脑上的图像,可以直接运行。
#include
#include
#include"opencv2/core.hpp"
#include"opencv2/core/utility.hpp"
#include"opencv2/highgui.hpp"
#include"opencv2/features2d.hpp"
#include
#include"opencv2/imgproc.hpp"
#include"opencv2/flann.hpp"
#include"opencv2/xfeatures2d.hpp"
usingnamespace cv;
usingnamespace std;
usingnamespace cv::xfeatures2d;
int main(intargc, char** argv)
{
Mat src1, src2;
src1 = imread("E:\\ trees\\img1.ppm", 1);
src2 = imread("E:\\ trees\\img2.ppm", 1);
namedWindow("src1", 0);
namedWindow("src2", 0);
imshow("src1", src1);
imshow("src2", src2);
vector<KeyPoint> keyPoint1,keyPoint2;
Ptr<Feature2D> surf =xfeatures2d::SURF::create(5000, 3);
surf->detect(src1,keyPoint1);
surf->detect(src2,keyPoint2);
Mat result1, result2;
drawKeypoints(src1,keyPoint1, result1, Scalar(0, 0, 255), DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS);//画出特征点
namedWindow("src1特征点", 0);
imshow("src1特征点", result1);
drawKeypoints(src2,keyPoint2, result2, Scalar(0, 0, 255), DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS);//画出特征点
namedWindow("src2特征点", 0);
imshow("src2特征点", result2);
Mat descriptors_1,descriptors_2;
surf->compute(src1,keyPoint1, descriptors_1);
surf->compute(src2,keyPoint2, descriptors_2);
BFMatcher matcher;
vector<DMatch> matches;
matcher.match(descriptors_1,descriptors_2, matches);
Mat img_matches;
drawMatches(src1,keyPoint1, src2, keyPoint2, matches, img_matches, Scalar(0, 0, 255), Scalar(0, 0, 255));
namedWindow("match1", 0);
imshow("match1", img_matches);
//提取出前最佳匹配结果
nth_element(matches.begin(),matches.begin() + 50, matches.end());
//剔除掉其余的匹配结果
matches.erase(matches.begin()+ 50, matches.end());
Mat img_matches2;
drawMatches(src1,keyPoint1, src2, keyPoint2, matches, img_matches2, Scalar(0, 0, 255), Scalar(0, 0, 255));
namedWindow("match2", 0);
imshow("match2", img_matches2);
waitKey(0);
return 0;
}
在以上代码中,Ptr<Feature2D> surf = xfeatures2d::SURF::create(5000, 3);用于创建SURF特征检测变量。其中的create()函数具有默认值,可以通过修改前面的Hessian阈值,得到不同的特征点检测数量,如上面代码中的5000。如果不修改,可能检测出很多特征点,在实际匹配中,太多的特征点也是无用的,所以需要控制特征点的数量。
从以上代码也可以看出,SURF算法与SIFT算法在opencv中的调用方式是完全一样的。所以只要会了一种,另一种也就学会了。下面图2到图5是具体的运行结果。
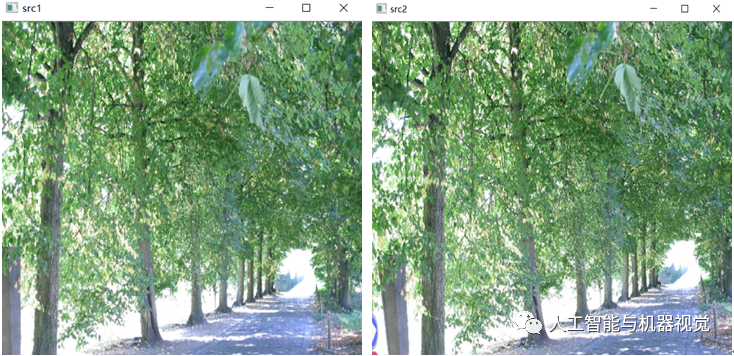
图2 原图

图3 特征点

图4 特征点匹配结果

图5提取出最佳匹配结果
SURF特征点检测算法的性能没有SIFT好。但是,该算法的运算速度足够快,可以满足实时检测的需要。因此,在实际的视觉检测中,应用该算法的反而更多一些。毕竟,生产中要追求速度的。而且,SURF算法的检测结果在很多时候已经能满足实际检测需要了。所以,如果不是特别追求检测性能,建议采用SURF算法进行特征点检测。















 2813
2813











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









