





角点:最直接的定义为在水平、垂直两个方向上变化均较大的点
最常用的角点检测算法为Harris角点检测方法,原理如下:
1.计算图像I(x,y)在X和Y两个方向的梯度Ix、Iy
2.计算图像两个方向梯度的乘积
3.使用高斯函数对Ix^2、Iy^2和Ixy进行高斯加权(取σ=1),生成矩阵M的元素A、B和C
4.计算每个像素的Harris响应值R,并对小于某一阈值t的R置为零
5.在3×3或5×5的邻域内进行非最大值抑制,局部最大值点即为图像中的角点
在matlab中对该方法进行了实验,代码如下:
function [posr,posc]=Harris1(in_image,a)clc; clear all; close all;in_image = checkerboard(50,3,3);a=0.04;% 功能:检测图像harris角点% in_image-待检测的rgb图像数组% a--角点参数响应,取值范围:0.04~0.06% [posr,posc]-角点坐标% in_image=rgb2gray(in_image);I=double(in_image);%%%%计算xy方向梯度%%%%%fx=[-1,0,1];%x方向梯度模板Ix=filter2(fx,I);%x方向滤波fy=[-1;0;1];%y方向梯度模板(注意是分号)Iy=filter2(fy,I);%%%%计算两个方向梯度的乘积%%%%%Ix2=Ix.^2;Iy2=Iy.^2;Ixy=Ix.*Iy;%%%%使用高斯加权函数对梯度乘积进行加权%%%%%产生一个7*7的高斯窗函数,sigma值为2h=fspecial('gaussian',[3,3],2);IX2=filter2(h,Ix2);IY2=filter2(h,Iy2);IXY=filter2(h,Ixy);%%%%%计算每个像元的Harris响应值%%%%%[height,width]=size(I);R=zeros(height,width);%像素(i,j)处的Harris响应值for i=1:height for j=1:width M=[IX2(i,j) IXY(i,j);IXY(i,j) IY2(i,j)]; R(i,j)=det(M)-a*(trace(M))^2; endend%%%%%去掉小阈值的Harris值%%%%%Rmax=max(max(R));%阈值t=0.005*Rmax;for i=1:height for j=1:width if R(i,j) R(i,j)=0; end endend%%%%%进行3*3领域非极大值抑制%%%%%%%%%corner_peaks=imregionalmax(R);%imregionalmax对二维图片,采用8领域(默认,也可指定)查找极值,三维图片采用26领域%极值置为1,其余置为0num=sum(sum(corner_peaks));%%%%%%显示所提取的Harris角点%%%%[posr,posc]=find(corner_peaks==1);figure;imshow(in_image);hold onfor i=1:length(posr) plot(posc(i),posr(i),'r+');endend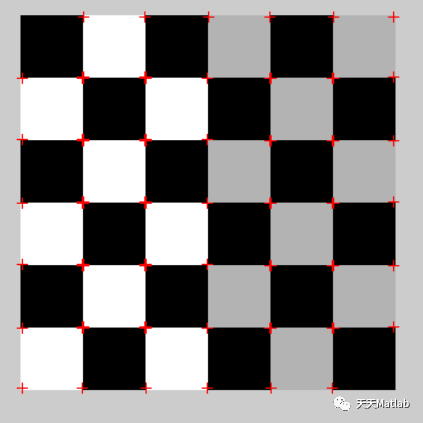
往期回顾>>>>>>
【模式识别】Matlab指纹识别【优化求解】A*算法解决三维路径规划问题 matlab自动识别银行卡号【优化求解】模拟退火遗传实现带时间窗的车辆路径规划问题【数学建模】Matlab实现SEIR模型【优化求解】基于NSGA-2的求解多目标柔性车间调度算法【优化求解】蚁群算法求最优值 输入"源代码"获取完整代码















 1191
1191











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









