





一、步进电机分类
1.按构造分类
①反应式;由定子和转子构成,定子上有绕组,转子由软磁材料制成。②永磁式;转子由永磁体制成,转子极数与定子极数相等。③混合式 定子有多相绕组,转子由永磁体构成,转子与定子间齿轮接触,提高精度与稳定性,输出大力矩。
2.按定子上相数来分
单相、二相、三相、四相、五相。两相四线需选择双极性驱动;两相六线可选择双极性驱动和单极性驱动。
单极性驱动▼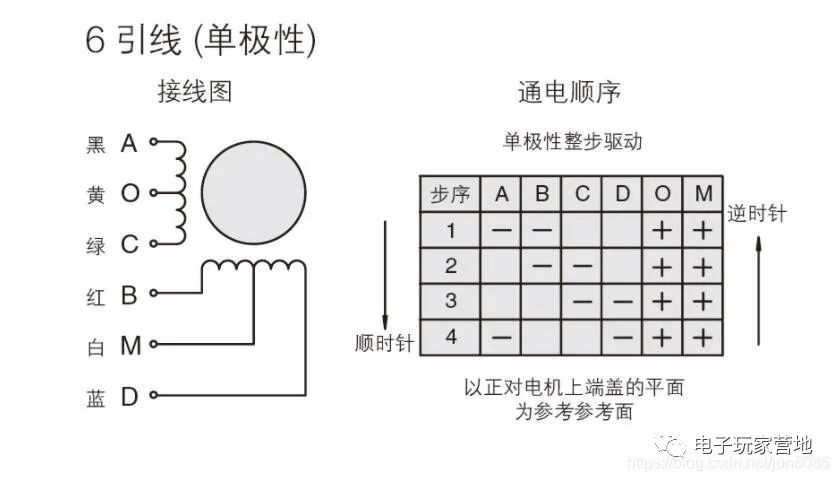 双极性驱动▼
双极性驱动▼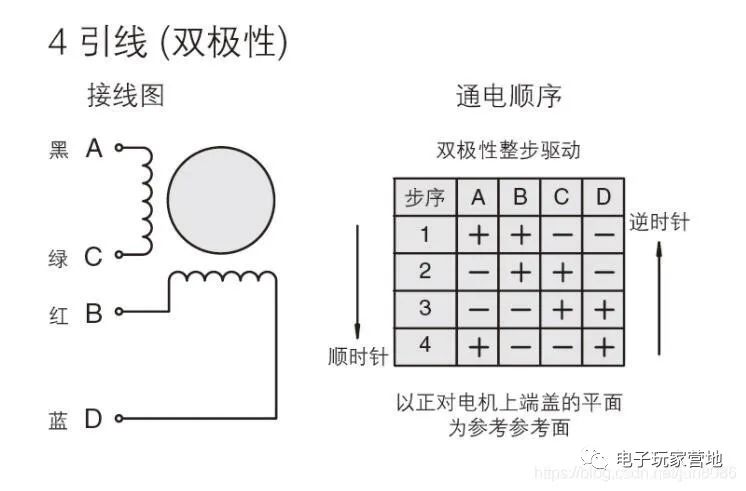 写驱动程序时,直接按照以上图片左侧表格,写相关状态码,前往第三大点。
写驱动程序时,直接按照以上图片左侧表格,写相关状态码,前往第三大点。
二、步进电机相关参数
1.步距角
步进电机在一个脉冲下的角位移(转了多少角度)。就四线单极性驱动来说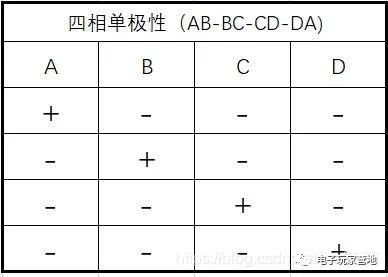
unsigned char code Zhenzhuan[4]={0x02,0x04,0x08,0x10}; //由表格可得转一圈的状态 正转0000 0010,0000 0100,0000 1000,0001 0000数组中一个元素就是一个脉冲。
2.分辨率
含义步进电机转一圈需要的脉冲数。
市面上常见的步进电机,有28步(如28byj-48)、42步进电机(3D打印机、写字机器人常用)。分辨率=360/步距角。
三、四相单极性驱动及例程
#include unsigned char code Zhenzhuan[4]={0x02,0x04,0x08,0x10}; //由表格可得转一圈的状态 正转0000 0010,0000 0100,0000 1000,0001 0000unsigned char code Fanzhuan[4]={0x01,0x08,0x04,0x02}; //反转 0001 0000,0000 1000,0000 0100,0000 0010/******************************************************************//* 延时函数 *//******************************************************************/void Delay(unsigned int i)//延时{ while(--i);}/******************************************************************//* 主函数 *//******************************************************************/main(){ unsigned char i; while(1) { for(i=0;i<4;i++) //4相 { P1=Zhenzhuan[i]; // Delay(500); //该参数可以调整电机转速 ,数字越小,转速越大,输出脉冲的频率 } }}四、技巧及疑问
1.有类似下面图片的步进电机如何写驱动。(图片中是28byj-48)
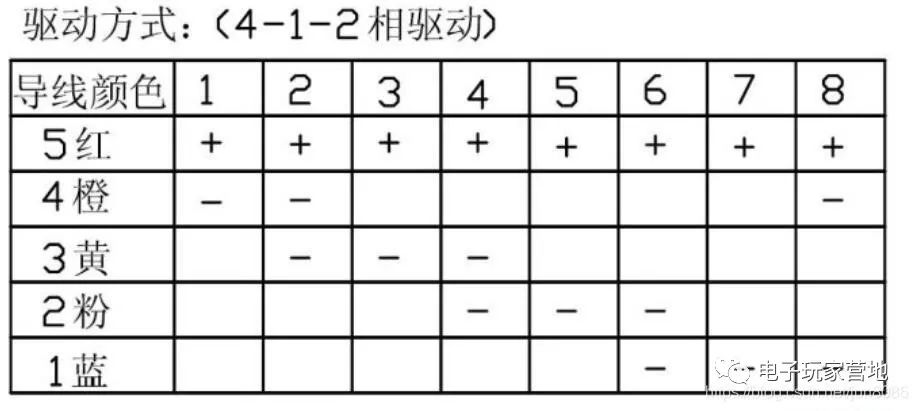 ①看图,5根线,一个循环(不是转一圈)需要8个脉冲。则脉冲代码如下:
①看图,5根线,一个循环(不是转一圈)需要8个脉冲。则脉冲代码如下:
uchar code zheng_zhuan[8]={0x08,0x0c,0x04,0x06,0x02,0x03,0x01,0x09}; //逆时钟旋转相序表 uchar code fan_zhuan[8]={0x09,0x01,0x03,0x02,0x06,0x04,0x0c,0x08}; //顺时针旋转相序表②28BYJ-48步进电机,分辨率28,则转一圈需要28个脉冲。当要控制该步进电机转动一圈时,两种办法,一、在数组中按照顺序从前到后复制28个代码(最容易实现)。二、在循环中实现。
for(j=1;j<5;j++){ for(i=0;i<8;i++) { P1= zheng_zhuan[i]; delay(300); if(j==4&&i=3)i=7; }}2.确定脉冲发送频率
① 舵机基本算是 10ms; ② 查看步进电机参数;③ 通过在延时函数中改变延时时间来试出来。














 2727
2727











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









