





/****************************
* 题目:已知旋转矩阵定义是沿着Z轴旋转45°。
* 按照该定义初始化旋转向量、旋转矩阵、四元数、欧拉角。请编程实现:
* 1、以上四种表达方式的相互转换关系并输出,看看是否正确
* 2、假设平移向量为(1,2,3),请输出旋转矩阵和该平移矩阵构成的欧式变换矩阵,并根据欧式变换矩阵提取旋转向量及平移向量
*
* 本程序学习目标:
* 学习eigen中刚体旋转的四种表达方式,熟悉他们之间的相互转换关系
* 熟悉旋转平移和欧式变换矩阵的相互转换关系
*
* 作者:公众号:计算机视觉life。发布于公众号旗下知识星球:从零开始学习SLAM
* 时间:2018.09
****************************/
#include <iostream>
#include <cmath>
#include <Eigen/Core>
#include <Eigen/Geometry>
#include <Eigen/Dense>
using namespace std;
int main ( int argc, char** argv )
{
// ---------- 初始化 -----------//
// 旋转向量(轴角):沿Z轴旋转45°
Eigen::AngleAxisd rotation_vector ( M_PI/4, Eigen::Vector3d ( 0,0,1 ) );
cout<<"rotation_vector axis = n" << rotation_vector.axis() <<"n rotation_vector angle = "<< rotation_vector.angle()<<endl;
//旋转矩阵:沿Z轴旋转45°
Eigen::Matrix3d rotation_matrix = Eigen::Matrix3d::Identity();
rotation_matrix << 0.707, -0.707, 0,
0.707, 0.707, 0,
0, 0, 1;
cout<<"rotation matrix =n"<<rotation_matrix <<endl;
// 四元数:沿Z轴旋转45°
Eigen::Quaterniond quat = Eigen::Quaterniond(0, 0, 0.383, 0.924);
cout<<"四元数输出方法1:quaternion = n"<<quat.coeffs() <<endl; // 请注意coeffs的顺序是(x,y,z,w),w为实部,前三者为虚部
cout<<"四元数输出方法2:n x = " << quat.x() << "n y = " << quat.y() << "n z = " << quat.z() << "n w = " << quat.w() << endl;
// 欧拉角: :沿Z轴旋转45°
Eigen::Vector3d euler_angles = Eigen::Vector3d(M_PI/4, 0, 0);// ZYX顺序,即roll pitch yaw顺序
cout<<"Euler: yaw pitch roll = "<<euler_angles.transpose()<<endl;
// 相互转化关系
// ---------- 请在下面补充对应的代码 ----------
rotation_matrix=rotation_vector.toRotationMatrix();//旋转向量转化为旋转矩阵
rotation_matrix=rotation_vector.matrix();
// 旋转向量转化为其他形式
cout<<"旋转向量转化为旋转矩阵方法1:rotation matrix =n"<< rotation_matrix<<endl;
cout<<"旋转向量转化为旋转矩阵方法2:rotation matrix =n"<<rotation_matrix <<endl;
quat = Eigen::Quaterniond(rotation_vector);
cout<<"旋转向量转化为四元数:quaternion =n"<<quat.coeffs()<<endl; //coeffs的顺序是(x,y,z,w),w为实部,前三者为虚部
// 旋转矩阵转化为其他形式
rotation_vector.fromRotationMatrix(rotation_matrix);//旋转矩阵转化为旋转向量
cout<<"旋转矩阵转化为旋转向量:rotation_vector axis = n" << rotation_vector.axis() <<"n rotation_vector angle = "<<rotation_vector.angle() <<endl;
//注意:fromRotationMatrix 参数只适用于旋转向量,不适用于四元数
rotation_vector =rotation_matrix.matrix();//之前出错
cout<<"旋转矩阵直接给旋转向量赋值初始化:rotation_vector axis = n" <<rotation_vector.axis() <<"n rotation_vector angle = "<<rotation_vector.angle() <<endl;
euler_angles = rotation_matrix.eulerAngles(2,1,0);
cout<<"旋转矩阵转化为欧拉角:yaw pitch roll = "<< euler_angles.transpose()<<endl;
quat = Eigen::Quaterniond (rotation_matrix);
cout<<"旋转矩阵转化为四元数:quaternion =n"<< quat.coeffs() <<endl;
// 四元数转化为其他形式
rotation_vector =quat.matrix();/之前出错
cout<<"四元数转化为旋转向量:rotation_vector axis = n" <<rotation_vector.axis() <<"n rotation_vector angle = "<<rotation_vector.angle()<<endl;
rotation_matrix = quat.matrix();
cout<<"四元数转化为旋转矩阵方法1:rotation matrix =n"<<rotation_matrix<<endl;
rotation_matrix = quat.toRotationMatrix();
cout<<"四元数转化为旋转矩阵方法2:rotation matrix =n"<<rotation_matrix<<endl;
// 欧氏变换矩阵
// 欧氏变换矩阵使用 Eigen::Isometry,仿射变换用 Eigen::Affine3d,射影变换用 Eigen::Projective3d
Eigen::Isometry3d T = Eigen::Isometry3d::Identity(); // 名称为3d,实质上是4 x 4的矩阵
T.rotate(rotation_vector);
T.pretranslate(Eigen::Vector3d(1,3,4));
cout << "Transform matrix = n" << T.matrix() <<endl; // 变换矩阵需要用成员函数转一下输出
Eigen::Quaterniond q=Eigen::Quaterniond(rotation_vector);
//写的有问题
//rotation_matrix=T.matrix();
// Eigen::Vector3d translation=T.translation();
//
// rotation_matrix=T.block<3,3>(1,1);
// Eigen::Vector3d translation=T.block<3,1>(1,1);
//Eigen::Vector3d translation=(T*v2d1.transpose()).transpose()*v2d.transpose();
///
/*
//我他妈是智障吗。明明一个函数写出来了,写了一大堆
Eigen::Matrix<double,4,4> matrix_44;//里面只能是double
matrix_44<<1,0,0,0,0,1,0,0,0,0,1,0,0,0,0,0;
Eigen::Matrix<double,4,3> matrix_43;
matrix_43<<1,0,0,0,1,0,0,0,1,0,0,0;
rotation_matrix=(T*matrix_44*matrix_43).transpose()*matrix_43;
Eigen::Matrix<double,4,4> matrix_44_1;
matrix_44_1<<0,0,0,0,0,0,0,0,0,0,0,0,1,0,0,0;
Eigen::Matrix<double,4,3> matrix_43_1;
matrix_43<<1,0,0,0,0,0,0,0,0,0,0,0;
Eigen::Vector3d vector_31(1,0,0);
Eigen::VectorXd translation=T*matrix_44_1*matrix_43*vector_31;//此处4×1 哆啦一个1
cout << "欧氏变化矩阵提取旋转矩阵:rotation_matrix = n" <<rotation_matrix << endl;
cout << "欧氏变化矩阵提取平移向量:translation = n" << translation.topLeftCorner(3,1)<< endl;*/
cout << "欧氏变化矩阵提取旋转矩阵:rotation_matrix = n" <<T.rotation()<< endl;
cout << "欧氏变化矩阵提取平移向量:translation = n" <<T.translation()<< endl;
Eigen::Vector3d P(1,1,1);
Eigen::Vector3d p=T*P;
Eigen::Vector3d p1=q*P;
cout<<"旋转矩阵变换后的P"<<p.transpose()<<endl;
cout<<"四元数变换后的P"<<p1.transpose()<<endl;
// ---------- 结束 ----------*/
return 0;
}
Eigen参考:
Eigen中四元数、欧拉角、旋转矩阵、旋转向量之间的转换
https://blog.csdn.net/yang__jing/article/details/82316093
Eigen矩阵块操作
https://blog.csdn.net/hanss2/article/details/78822955
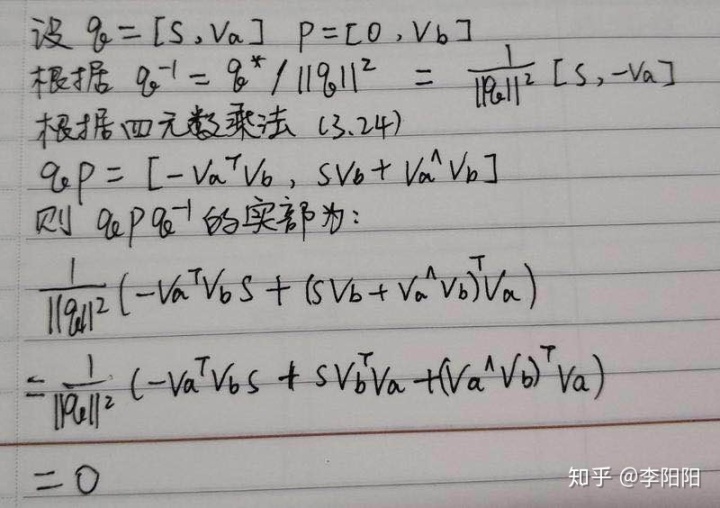
我们知道单位四元数q可以表达旋转。一个三维空间点可以用虚四元数p表示,用四元数 q 旋转点 p 的结果p'为: p'=qpq^-1
证明:此时 p′ 必定为虚四元数(实部为零)。
参考《视觉SLAM十四讲》P55页及四元数的运算















 1406
1406











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









