






 本文介绍了如何利用Terrasolid和Inpho软件对无人机点云数据进行滤波处理,以生成准确的DSM和DEM。在处理过程中,通过分类、平滑、三角构网等步骤,减少了地物遮挡和匹配误差导致的高程偏差,最终在EPS中实现精确的高程采集。
本文介绍了如何利用Terrasolid和Inpho软件对无人机点云数据进行滤波处理,以生成准确的DSM和DEM。在处理过程中,通过分类、平滑、三角构网等步骤,减少了地物遮挡和匹配误差导致的高程偏差,最终在EPS中实现精确的高程采集。
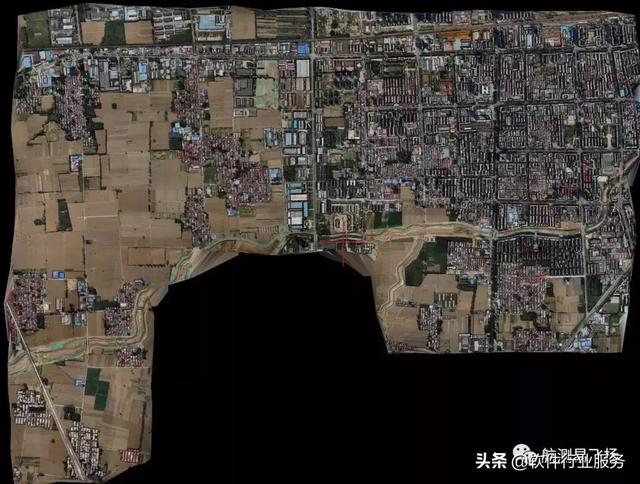
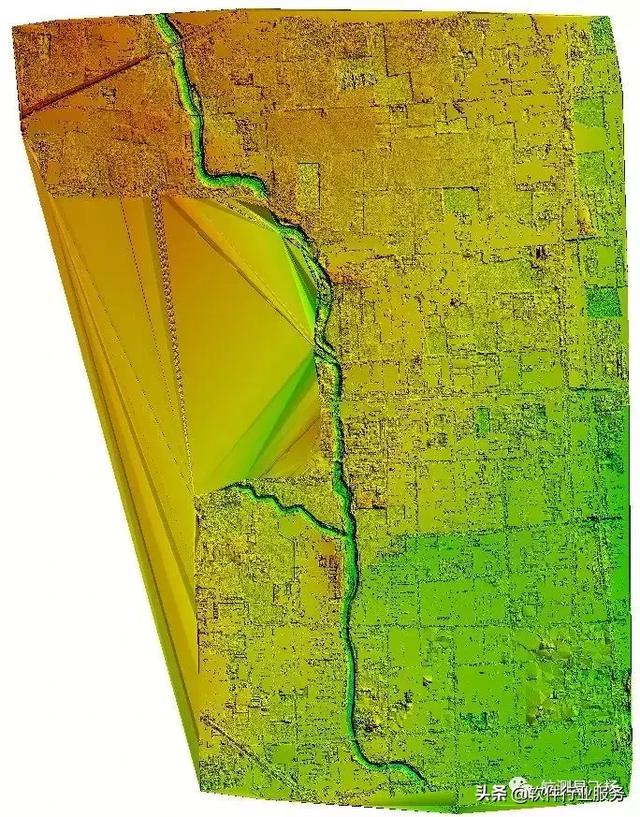
前几天,Boss接了个前期规划测绘的项目,甲方要求提交正射影像、DSM及线划图成果,老板大手一挥就将项目交给正在玩王者农药的小编,并承(wei)诺(xie)给小编加鸡腿,为了日思夜想的鸡腿,小编很(bu)愉快的接受了任务,并确定用PIX4D生成正射影像和DSM,然后在EPS里把DSM和DOM叠加采集主要地物边界线的方案,接着拉着外业兄弟火速进行无人机航飞作业,处理生成的DOM和DSM没有什么问题,如下图(是不是很漂亮):
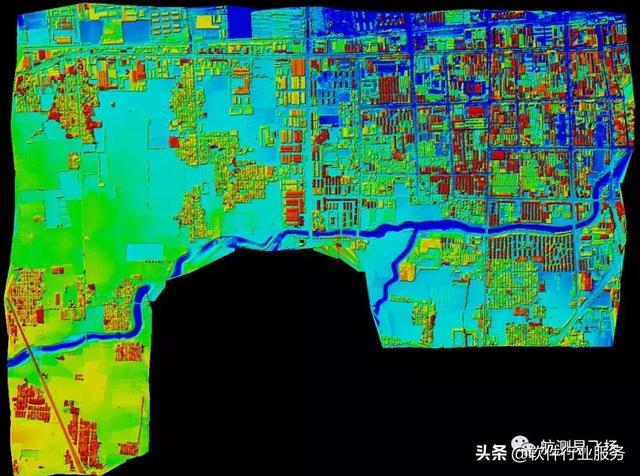
来个侧视图

But
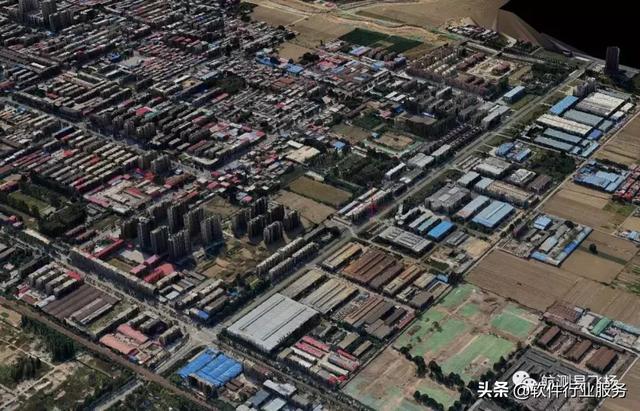
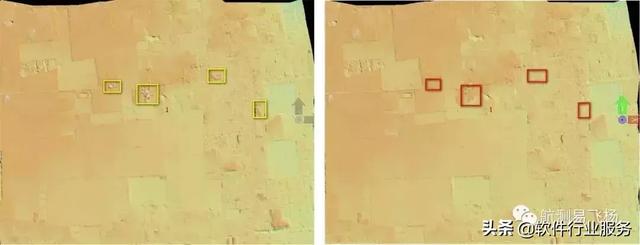
在EPS软件中进行采集线划图时,由于地物的遮挡和影像匹配误差的影响,构网后在同一区域采集高程点时,高程误差比较大,下图中的空旷公路区域,高程保持的比较好,可以直接采集高程:

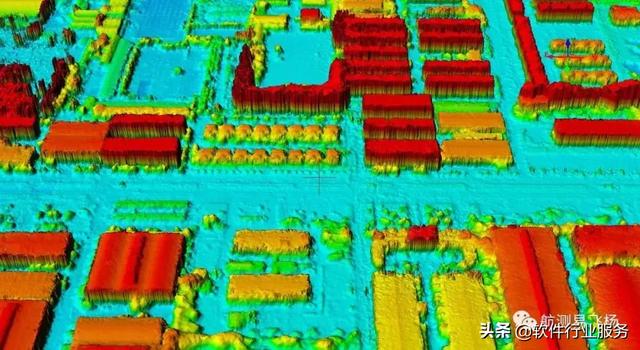
但在这个图示中,受地物遮挡及树木的影响,匹配得到的点云误差比较大,构网后可以看出道路凹凸不平,这样就给高程采集带来很大的不便:

向老板反应这个问题,老板依然语重心长的让我发扬测绘人一不怕苦,二不怕死的加班精神,对数据负责,对甲方负责,在老板的精神鼓舞下,在鸡腿的诱惑下,小编终于在一个周六的凌晨找到了解决办法,为了铭记这次难忘的加班,为了千千万万的航测兄弟的鸡腿,现将解决的思路和步骤与大家分享,同时也想通过这个案例与大家分享无人机影像匹配点云的滤波知识,期待大家都能涨工资,加鸡腿!!!
解决思路如下:
首先将PIX4D匹配得到的点云加载到Terrasolid中进行滤波得到地面点,然后构建三角格网并进行简单的DEM编辑,接着将滤波后的点云在Inpho的DTMaster模块中进行补洞和DEM编辑,然后导出滤波编辑后的点云,三角构网生成tif格式的DEM,最终在EPS软件中将DEM和DOM进行叠加,从而采集到正确的高程点。
详细操作步骤如下:
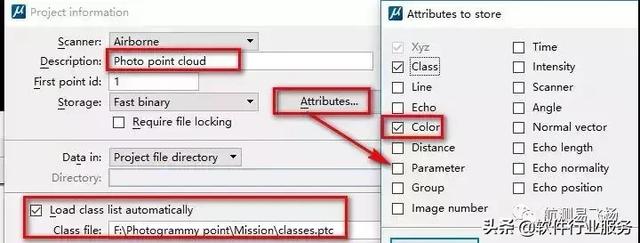
第一步,新建Terrasolid工程,添加必要的点云类别、勾选颜色属性并对工程进行分块,红色的边界线为分块边界线,如下图所示:

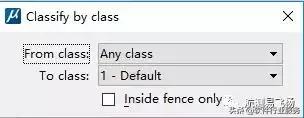
第二步,下面以分块中的一块数据为例,使用宏命令进行点云分类,主要有以下几个步骤:
a.将点云分类为默认的default类,如下图:
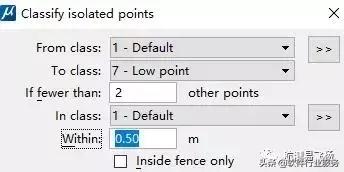
b.分离出孤立点和低点(terrasolid使用渐进三角网加密算法进行滤波分类,对低点噪声很敏感):

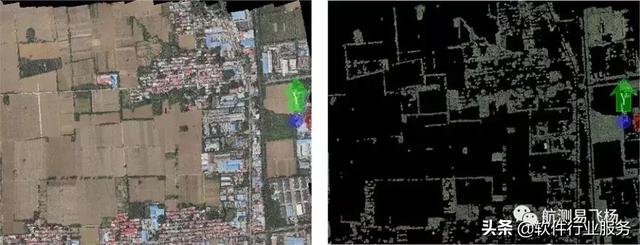
c.用植被指数分类出植被点:

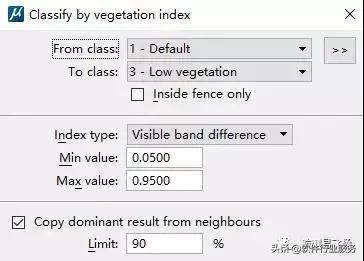
分类得到的植被点如下图所示:
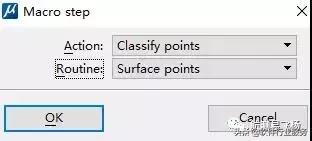
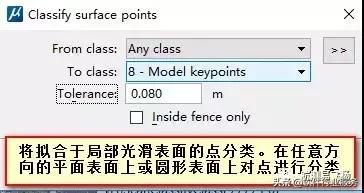
d.通过表面拟合,分离出属于表面上的点,如图:
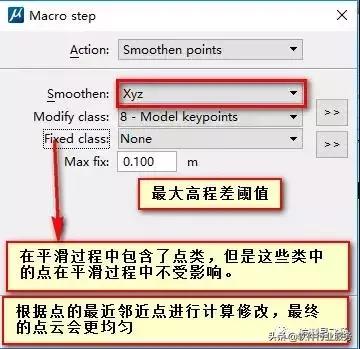
e.对分离出的表面模型点进行平滑操作,以减少噪声:
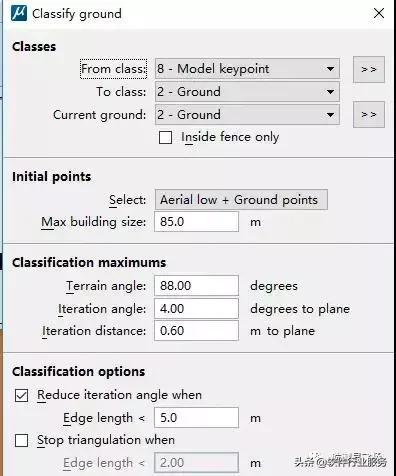
f.分离出地面点:
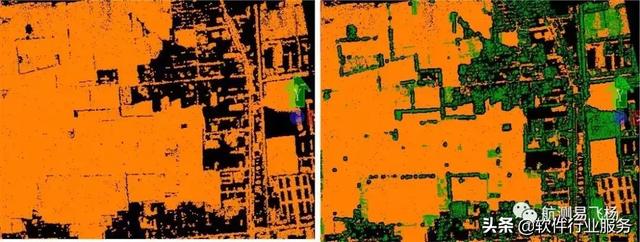
最终的分类结果(地面点以及地面点加上植被点)如图:
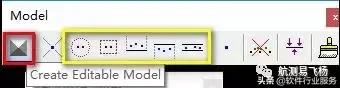
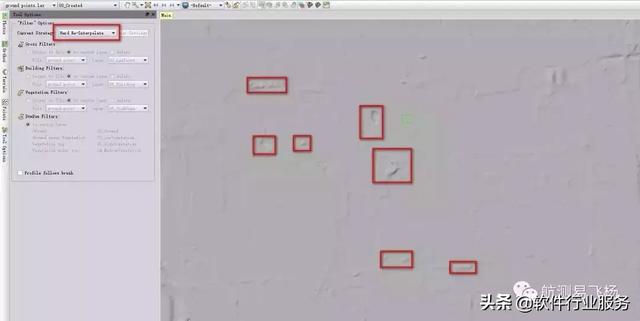
第三步,在terrasolid中对分类得到的地面点进行三角构网并手动对错分的点云类进行修改,使用下图中红框工具构网,然后使用黄框中的工具对错分类的点云进行手动分类
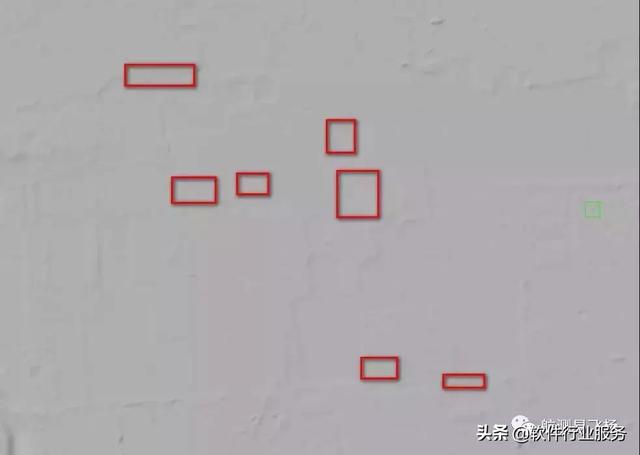
手动分类前后的对比效果如下:
在Terrasolid中经过简单手动编辑后构网得到的DEM如下:

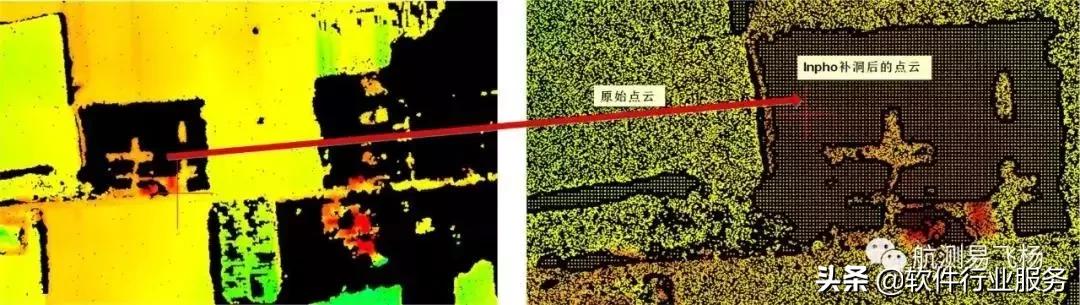
第四步,在terrasolid中对分类得到的地面点简单进行手动修改后,将编辑后点云导出并加载到Inpho软件中进行补洞及快速便捷的二次编辑,补洞前后效果如下:
在Inpho的DTMaster模块中进行快速的地形插值编辑,示意图如下:
第五步,导出补洞并在DTMaster进行手动编辑后的点云,将点云加载到globalmapper软件中,对点云构建三角格网生成tif格式的DEM数据(带tfw信息),如图:
最后在EPS中叠加融合DEM及DOM数据,然后在裸地、公路等区域采集高程点,最终小编及时的完成了老板交代的任务,get了一项影像匹配点云滤波技能,顺利的吃上了鸡腿!!!
怎么样,看完小编的这波操作,你是不是也想尝试一下。

















 705
705

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









