






介绍
多目标跟踪问题描述
在单目标无杂波环境下,目标的相关波门内只有一个点迹,此时只涉及跟踪问题。在多目标情况下,有可能出现单个点迹落入多个波门的相交区域内,或者多个点迹落入单个目标的相关波门内(如Fig 1所示),此时就会涉及数据关联问题。
数据关联其实就是一个沿着时间轴,将来自同一个物体的不同时刻的信号串联起来的过程。
数据关联的准确性直接影响目标跟踪的整体效果。目前的数据关联算法有许多种,比如最近邻法(NN), 概率数据关联(PDA),联合概率数据关联(JPDA),多假设跟踪(MHT),神经网络等等
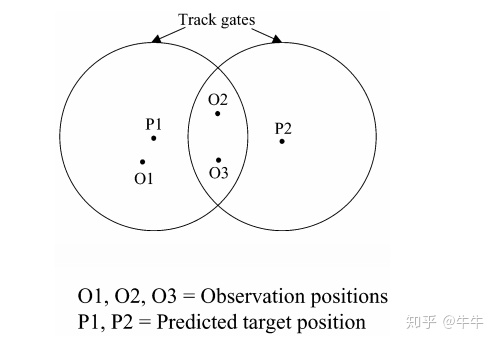
Fig 1. Example of typical data association conflict situation
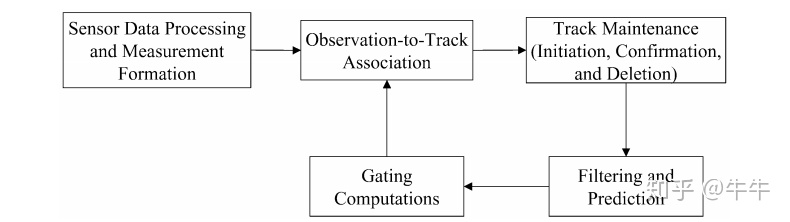
跟踪流程
最近邻法(Nearest Neighbor Algorithm, NN)
- 最近邻数据关联
将落在关联门内并且与被跟踪目标的预测位置“最邻近”的观测点作为与航迹相关联的观测。
如有三批目标和三个测量,所形成的关联矩阵为:
m1,m2,m3表示关联矩阵每列,m1表示第一列,m2表示第二列,m3表示第三列,分别代表三个测量值。T1,T2,T3表示矩阵每行,T1表示第一行,T2表示第二行,T3表示第三行,分别代表三批目标值。
按最近邻
注:测量与目标的分配是按最小值来分配的,分配完之后,则出掉那一行和那一列,剩下再按最小分配。
如:在关联矩阵中,第一行数字1最小,则配对,然后划掉矩阵第一行第二列,再看剩下的第二行中数字4最小,则,再划掉第二行第一列,接着操作,得到。
特点:一个目标最多只与跟踪门中一个测量相关,取跟踪门中距目标最近的测量与目标相关。
- 全局最邻近
使总的距离或关联代价达到最小,最优分配的问题
其中
表示测量i与目标j之间距离。用矩阵表示时,矩阵的每行每列只能有一个元素为1.
例如
m1,m2表示关联矩阵第一列和第二列,代表2个测量数据,T1和T2表示关联数据第一行和第二行,代表2个目标。
关联结果:
例:关联矩阵
关联结果:
注:全局最近邻的关联结果即是在所有配对的结果中选取其总数最小的那一个。比如说第一个例子,有两种关联结果,第一种
关联矩阵较大时,二维分配问题可Munkre算法或Burgeois算法求解,求解具多项式复杂度,非NP问题( 二分图匹配(Bipartite Matching)问题与匈牙利算法(Hungary Algorithm))
特点:一个目标最多只与跟踪门中一个测量相关,以总关联代价(或总距离)作为关联评价标准,取总关联代价或总距离最小的关联对为正确关联对。
联合概率数据关联(Joint Probabilistic Data Association, JPDA)
联合概率数据关联是Bar-shalom在单目标跟踪的概率数据关联算法(PDA)的基础上,提出的适合于多目标跟踪情形的一种数据关联算法。
确认矩阵
为了表示有效回波和各目标跟踪门的复杂关系,引入了确认矩阵的概念,定义为
,其中
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 4866
4866











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









