





Date:2020-6-28
整理:Tom Hardy
来源;公众号【3D视觉工坊】
欢迎加入国内最大的3D视觉交流社区,1700+的领域从业者正在共同进步~
往期干货资源:
汇总 | 国内最全的3D视觉学习资源,涉及计算机视觉、SLAM、三维重建、点云处理、姿态估计、深度估计、3D检测、自动驾驶、深度学习(3D+2D)、图像处理、立体视觉、结构光等方向!
公众号为大家整理了一系列的干货,主要包括3D重建、SLAM、点云处理、3D检测与识别、深度估计、姿态估计等,现已托管至Github,欢迎大家fork&star,关注3D视觉工坊,获取更多干货内容。
1、3D重建
主要包括基于单目图像重建、结构光、双目重建、多目重建、多视图几何、深度相机、光场、SFM等内容~
链接:Tom-Hardy-3D-Vision-Workshop/aweosme-3D-restruction
2、3D检测与识别
主要包括基于单目图像的3D检测、基于双目的3D检测、基于立体视觉的3D检测、基于融合数据的3D检测~
链接:Tom-Hardy-3D-Vision-Workshop/awesome-3D-object-detection
3、点云处理
主要包括点云的滤波、特征提取、线面拟合、面积体积计算、识别分类、点云分割与配准、点云数据集等~
链接:Tom-Hardy-3D-Vision-Workshop/awesome-pointcloud-processing
4、姿态估计
主要包括基于RGB图像的姿态估计、基于RGB-D数据的姿态估计、基于点云数据的姿态估计、基于model方式的姿态估计、基于投票方式的姿态估计、基于深度学习方式的姿态估计等~
链接:Tom-Hardy-3D-Vision-Workshop/awesome-6D-pose-estimation
5、深度估计
主要包括基于单目的深度估计、半监督和自监督方式的深度估计~
链接:Tom-Hardy-3D-Vision-Workshop/awesome-depth-estimation
6、自动驾驶领域算法汇总
主要包括仿真工具、框架、数据集、感知算法等~
链接:Tom-Hardy-3D-Vision-Workshop/awesome-Autopilot-algorithm
7、SLAM
主要汇总了一些优秀的开源仓库~
链接:Tom-Hardy-3D-Vision-Workshop/awesome-SLAM-algorithm
8、缺陷检测
主要包括缺陷检测的一些文章汇总、代码实现~
链接:Tom-Hardy-3D-Vision-Workshop/awesome-defect-detection
9、CV会议期刊汇总
链接:Tom-Hardy-3D-Vision-Workshop/awesome-cv-conference-journals

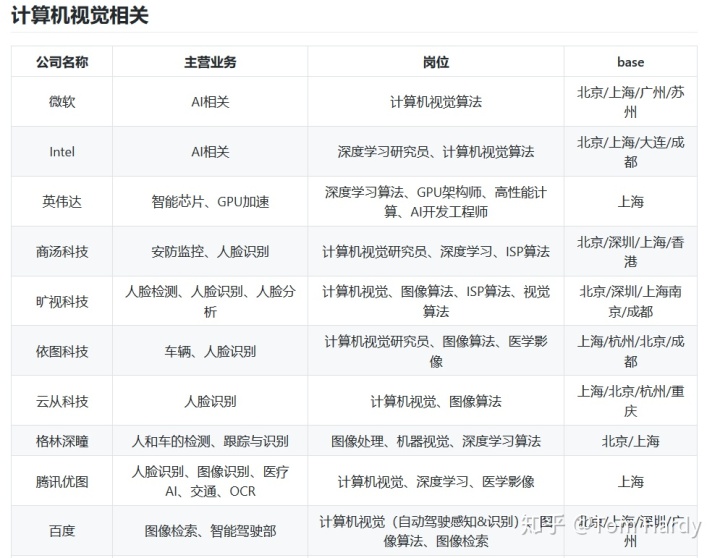
10、AI相关公司汇总
链接:Tom-Hardy-3D-Vision-Workshop/awesome-AI-company-summary
往期干货资源:
汇总 | 国内最全的3D视觉学习资源,涉及计算机视觉、SLAM、三维重建、点云处理、姿态估计、深度估计、3D检测、自动驾驶、深度学习(3D+2D)、图像处理、立体视觉、结构光等方向!
汇总 | 3D目标检测(基于点云、双目、单目)
汇总 | 6D姿态估计算法(基于点云、单目、投票方式)
汇总 | 三维重建算法实战(单目重建、立体视觉、多视图几何)
汇总 | 3D点云后处理算法(匹配、检索、滤波、识别)
汇总 | SLAM算法(视觉里程计、后端优化、回环检测)
汇总 | 深度学习&自动驾驶前沿算法研究(检测、分割、多传感器融合)
汇总 | 相机标定算法
汇总 | 事件相机原理
汇总 | 结构光经典算法
汇总 | 缺陷检测常用算法与实战技巧















 1543
1543











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









