





私信“干货”二字,即可领取138G伺服与机器人专属及电控资料!
由于前面已经对异步电机和同步电机有了初步的感性认知,因此下面我们将从控制策略层面来逐层观察电机如何控制的。主要分为两部分,第一部分为电机的开环控制,没有任何反馈,没有电流环反馈,也没有速度环反馈。第二部分为电机的闭环控制,有电流环反馈,也有速度环反馈,特别是给电机一个指定的速度时,看看电机是如何反应以及建立速度的过程。
需要具备以下工具和感知:
1、 Matlab软件,最好是R2013a版本+
2、 Simulink仿真单元,需要熟悉里面的各个功能块
3、 SVPWM的机制和原理的了解,尤其是各个扇区以及伏秒平衡等
4、 三相逆变的初步认知
5、 各种变换,包含Park和Clark变换和逆变换。
6、 PI调节电流内环开环传递函数,普遍采用空间状态进行小信号建模。
7、 环路稳定机制,幅频特性以及相频特性等。
8、 各种零极点的特性。左半平面极点、右半平面零点和初始极点的特性等。
第一部分:开环控制
1、 建立SVPWM模型,如下图1。其中主要有四个子模型组成:
a、扇区判断子模型
b、 向量作用时间子模型
c、开关作用时间子模型
d、PWM波形产生子模型。
由图1可以看出,此SVPWM模型的输入为左上边的接口:abo静止坐标系的向量,而最右边的是输出接口,为6路互补的PWM信号。
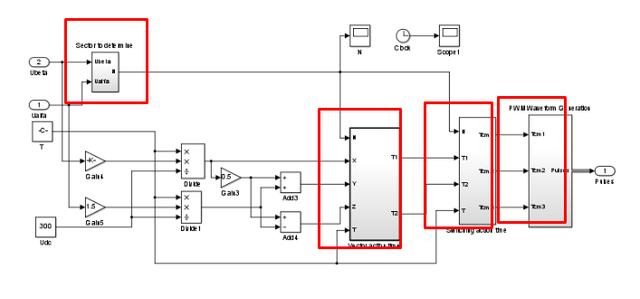
图1 SVPWM模型
下图2是扇区判断子模型,为什么需要用到扇区判断?因为SVPWM具备六个扇区,对于任何给定的值,需要判断这个值位于哪个扇区,每个扇区控制三相逆变电路中的6个开关管的次序都不一样。从图中可以看出,扇区判断子模型无非就是做一下简单的逻辑运算。

图2 扇区判断子模型
下图3是向量作用时间子模型。在判断出扇区后,需要利用伏秒平衡进行给定值的合成,合成机制有许多种,包括零向量的选择等。
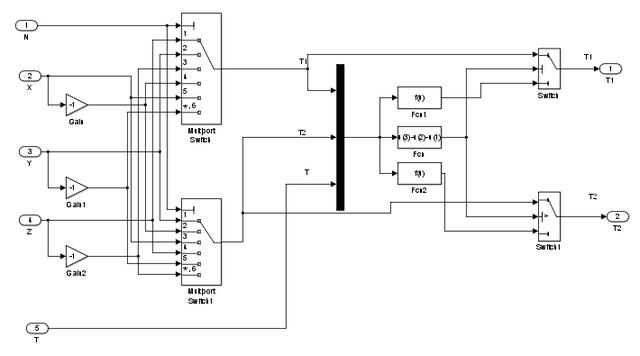
图3向量作用时间子模型
图4是开关作用时间子模型。如前所述,伏秒平衡的运用。
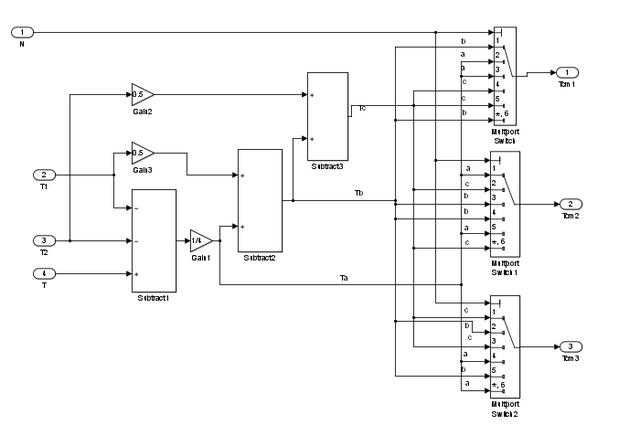
图4 开关作用时间子模型
图5是PWM波形产生子模型。可以看到图5的左上方的三角波型,这个就是载波,相对于给定值的频率,它的频率要高好多。图5的右侧就是PWM脉冲波的输出接口,可以直接对接三相逆变电路。
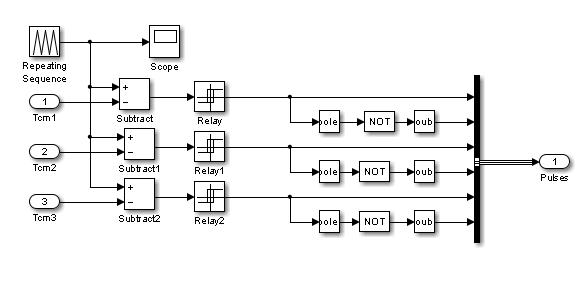
图5 PWM波形产生子模型
OK,把SVPWM模型建好之后,我们需要验证其功能是否正确。对SVPWM模型的输入接口abo静止坐标系的向量给其进行激励,如下图6。此处的激励信号是ab两个矢量信号,a和b矢量相差90°,幅值相等,如图7所示。而SVPWM模型的输出信号如下图8所示。从图8可以看出,在外部激励信号存在的情况下,SVPMW模型的功能是正确的。
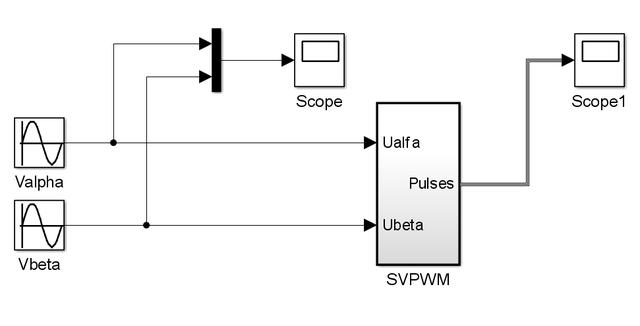
图6 对SVPWM输入激励源
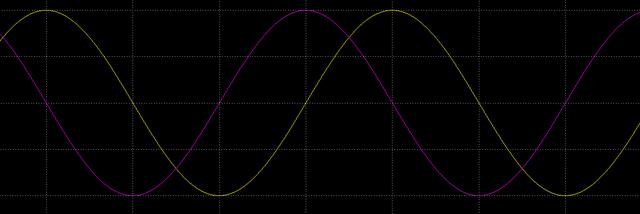
图7 abo电压矢量激励信号
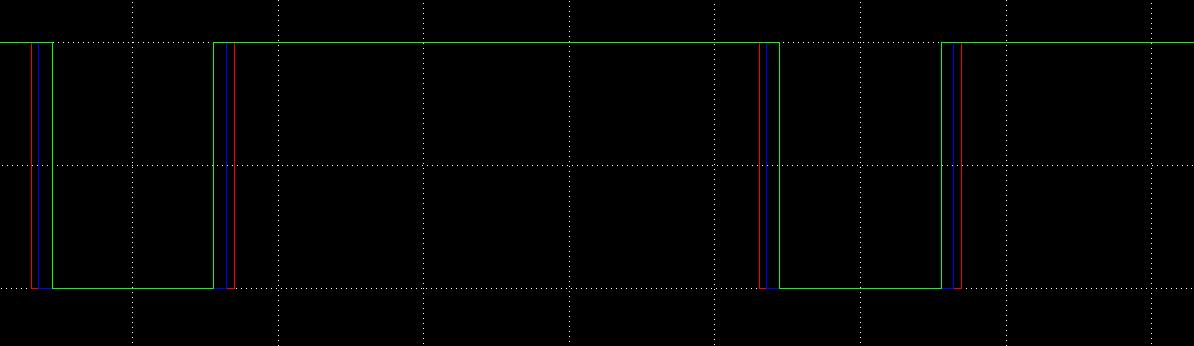
图8 PWM上桥臂输出信号
OK,Let’s go。下面要搭建整个开环工作电路。其中需要到SimpowerSystems里面的各个功能,如图9所示。其中主要由SVPWM模型、母线电压源、通用三相逆变桥以及模拟负载组成。
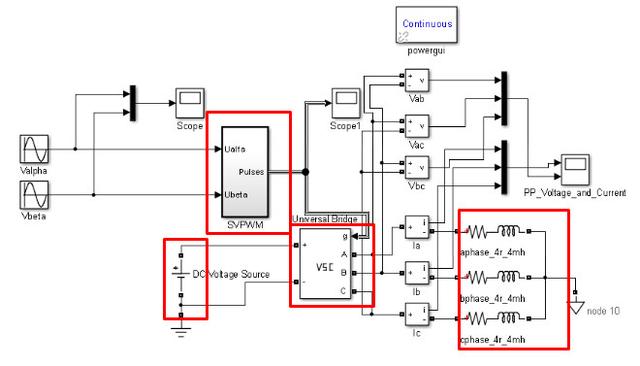
图9 开环工作电路
A、设置RL模拟负载的参数为4欧姆和4mH,运行仿真,结果如下图:
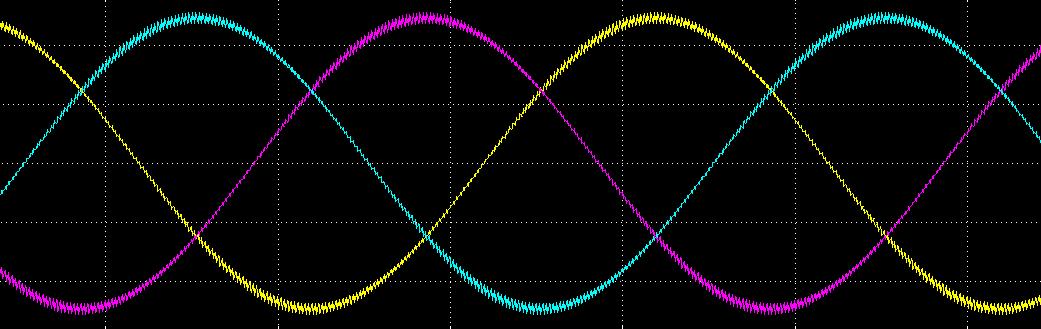
图10 abc三相输出电流(4欧姆,4mH)
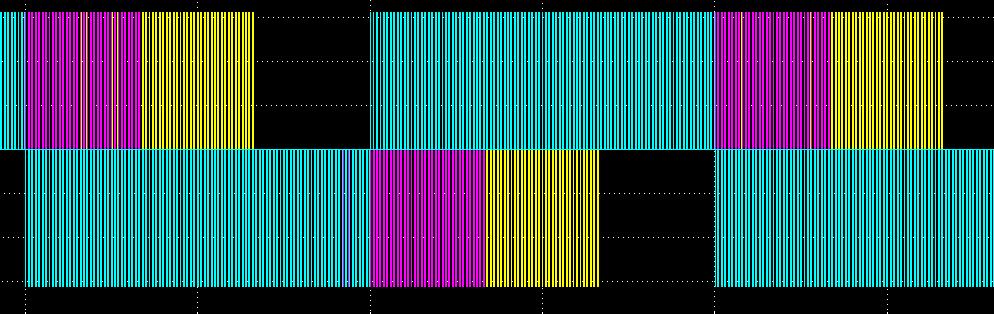
图11 Vab,Vbc,Vac输出相电压波形(4欧姆,4mH)
B、把RL参数改为4欧姆和0.4mH,那么仿真得到的波形如下图:
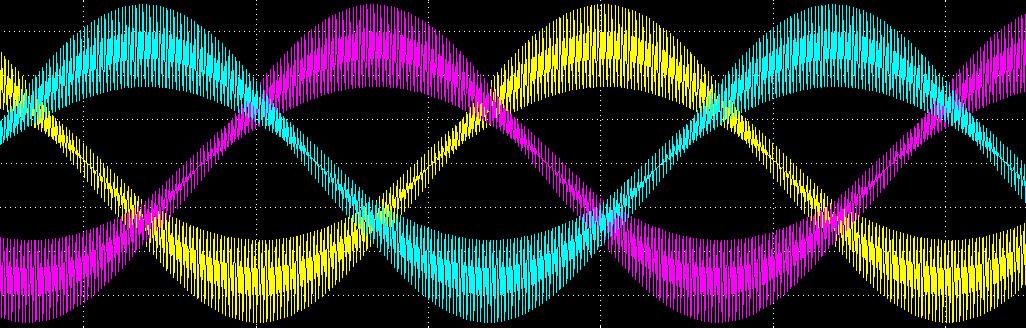
图12 abc三相输出电流(4欧姆,0.4mH)
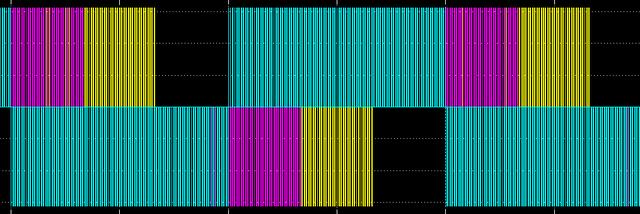
图13 Vab,Vbc,Vac输出相电压波形(4欧姆,0.4mH)
C、进一步减小电感参数到0.1mH,电阻参数保持不变,那么仿真得到的波形如下图:
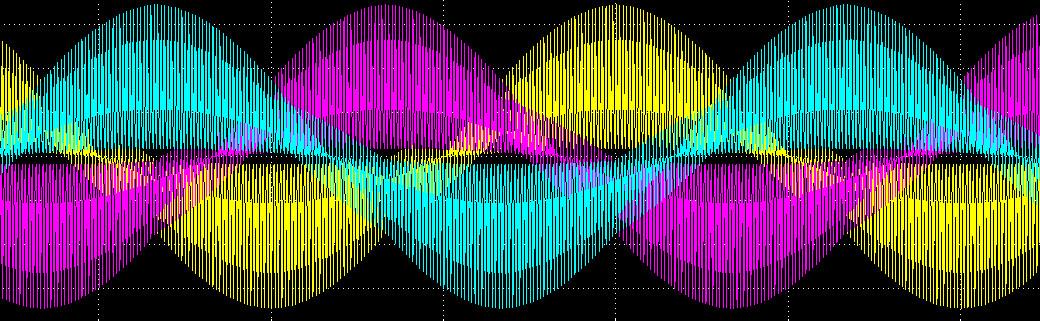
图14 abc三相输出电流(4欧姆,0.1mH)

图15 Vab,Vbc,Vac输出相电压波形(4欧姆,0.1mH)
D、某品牌驱动器实际测得的电流波形如下图16,可以看到图14跟图16非常相似。
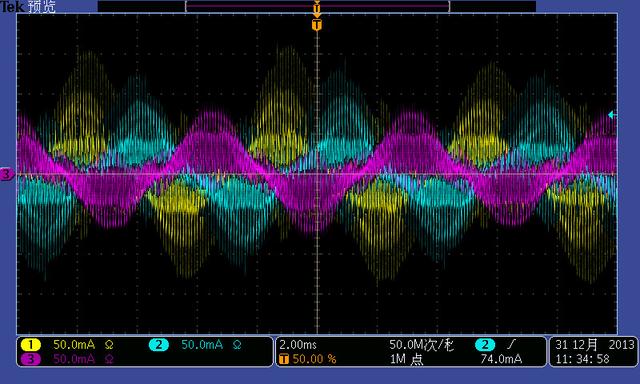
图16 某品牌UVW三相输出电流波形
第二部分:闭环控制
闭环控制电路如下图17,这是一个最基本的矢量控制算法。
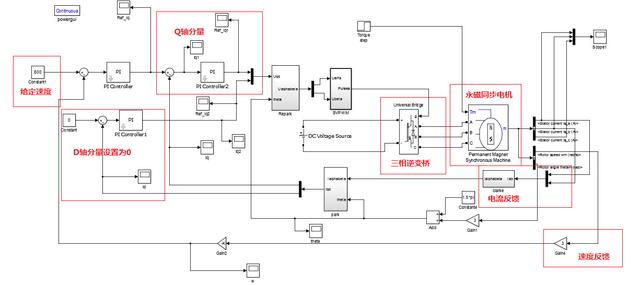
图17 闭环控制电路
点击电机的启动按键,得到电机的速度反应图,如图18:
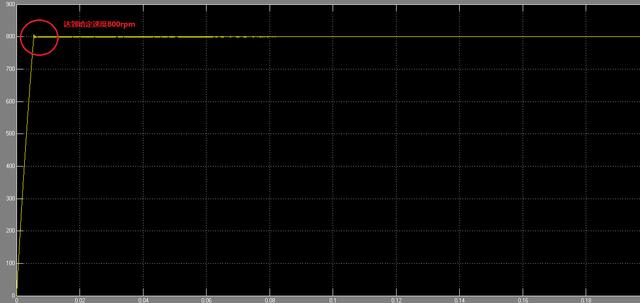
图18 电机速度到达
接下来把图18进一步放大看看,尤其是三个指标:
1、 建立时间,即速度环的相应时间
2、 速度过冲
3、 稳态速度的波动
分别如下图19和图20
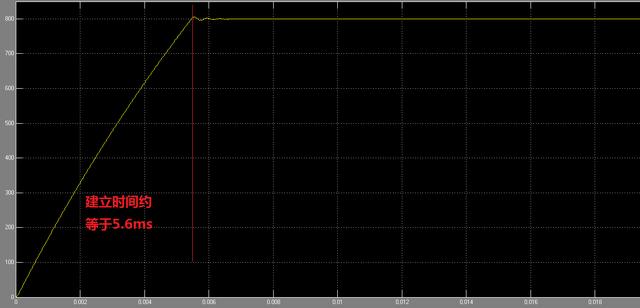
图19 速度建立时间
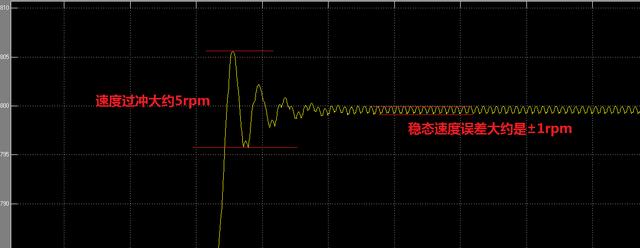
图20















 8541
8541











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









