






得到了系统的数学模型后,下一个问题就是分析系统性能,经典的分析方法主要有时域分析、根轨迹、频域分析。
一、时域分析
控制学科的一个重要观点就在于对动态系统的分析,而对于上篇文章讨论的电路模型来说,要分析它的系统性能,首先要有输入信号。
典型的输入信号有:
典型输入信号_百度百科baike.baidu.com
有人会问,分析系统时到底选择哪种输入信号,一般的原则是选取最符合实际情况和最不利的信号,最符合实际情况这个没问题,什么叫最不利的信号?控制工程中最喜欢的是稳定信号,最不喜欢的则是那些突然来的变化,重点关注的也是那些变化的信号。
但对于线性系统来说,不同输入信号能表征的系统性能是一致的,因此一般使用单位阶跃信号来测试,便于比较各个系统。
拿到了输入信号,就到了评价系统这个问题,和评价一个人一样,什么都不给让你评价一群人里谁比较好,可能会有千奇百怪的答案,有的看身高,有的看长相,有的看穿什么衣服,没有统一的标准,最后也得不到自己想要的答案。
所以问题就转变为如何建立一个指标体系来判断系统。
再来看一个工程案例:
比方说我们要通过控制系统把反应釜的温度维持在400度
输入一个阶跃信号,用温度测量仪观察到的变化图像为
工程上的需求:
1、需要维持某个容器的内部温度基本不变。
2、波动不能太大,否则会损坏仪器
3、速度要跟上,不能慢慢悠悠的,花了半天才到400度
拿着需求和图对比,很容易就能建立指标来评价系统的性能如何
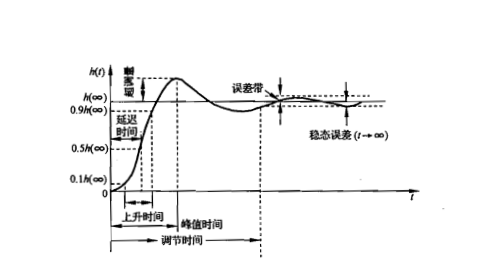
首先第一个需求“温度基本不变”,可以看波形趋于常值时在哪个数周围,比如等了一会,温度一会401,一会399.5,一会400.2,一会到了400,那么就可以认为系统性能满足了第一个需求。而如果从理论上提升一下,就得到了第一个概念
①稳态误差
系统从一个稳态过渡到新的稳态,或系统受扰动作用又重新平衡后,系统出现的偏差。稳态误差记作ess(Steady-State Errors)。
再看第二个需求,“波动不能太大”,这个也比较直观,首先看看变化过程中峰值是多少,比如峰值为430度,然后怎么衡量这个差值呢,有人说,这还不简单,430-400,30这个数就能衡量啊,做差值是一个很好的思路,但单纯的差值能不能用?我们可以考虑两个系统:一个稳态值400峰值430,一个稳态值1000峰值1060,谁的波动比较大,单纯用差值自然第二个大,看图像则是第一个,这就启示我们,除了考虑差值外,还要看所占的比例。
②超调量
也叫最大偏差(maximum deviation)或过冲量。偏差是指被调参数与给定值的差。对于稳定的定值调节系统来说,过渡过程的最大偏差就是被调参数第一个波峰值与给定值的差A。随动调节系统中常采用超调量这个指标B。在y(∞)不等于给定值时:超调量=[Y(Tm)-Y(∞)]/Y(∞)×100%,(A—最大偏差;B—超调量)。
第三个需求,“速度要跟上”,需要考虑时间指标,这块就直接给概念吧,毕竟有些是规定,比如上升时间概念中的90%,调节时间概念中的5%,这些数都来自规定。
③时间指标

这里在教材基础上补充一个指标
④指令信号响应
(发出的指令多久能响应,效果如何)

拿到了性能指标,就可以看看典型系统的指标都是怎么样的,具体每种系统的特性不作展开,见相关链接
比如一阶系统:
自动控制原理3.1 一阶系统时域分析wenku.baidu.com
二阶系统:
[图文]3-3二阶系统的时域分析 - 百度文库wenku.baidu.com既然传递函数的分子与分母都出现了表达式,一个很自然的想法就是讨论零点与极点,一个使分子为零,一个使分母为零。这种特殊点会不会影响系统的性能。
经过试验发现,零极点的确会影响一些性能指标,具体见二阶系统与高阶系统响应分析,这一点也影响了后边的分析,后续的设计方法,都是为了使系统的零极点出现在合适的位置,以满足系统的性能指标。这一点将在频域分析法里详尽展示。
高阶系统:(主导极点:传递函数分母为零的点,距虚轴最近的极点,周围又没有闭环零点,而其他闭环极点又远离虚轴,那么这样的极点就被称为主导极点,它对应的响应分量在系统响应过程中起到主导作用)
[图文]高阶系统时域分析 - 百度文库wenku.baidu.com二、稳定性
二阶系统里引入了阻尼比和自然频率的概念,是指二阶系统标准形式中的参数
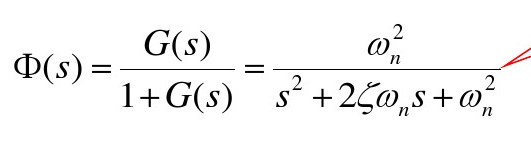
经过大量实验,我们可以发现
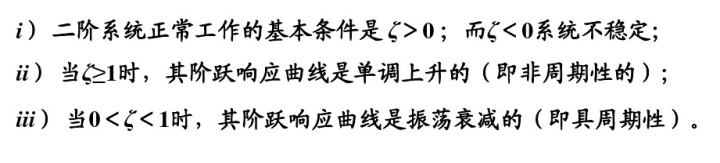
这个现象引发了相关思考,当阻尼比处于0-1之间时,符合我们上面讨论过的图像,大于1时,单调上升且有界,这两种现象虽然不同,但多数满足需求,我们需要特别注意的是,为什么阻尼比小于零,系统不稳定。有没有什么深层次原因?
要搞清楚这个问题,首先要搞定另一个问题,什么是稳定性。
因为专栏刚开始,所以采用最简单的描述,后续会深入介绍诸如BIBO稳定性的概念。
这里的稳定性说白了就是看图像最后能不能达到常值。或者换一种思路,设线性系统在初始条件为零时,作用一个理想单位脉冲,此时的系统输出增量脉冲响应为kt,这相当于系统在扰动信号作用下,输出信号偏离原平衡工作点的问题,若t趋于无穷时脉冲响应等于零,则可以说明系统是稳定的。
1868年著名物理学家麦克斯韦发表的《论调节器》最早把调速器的运动状态用微分方程来描述,他导出了调节器的微分方程,并在平衡点附近进行线性化处理,指出稳定性取决于特征方程的根是否具有负的实部。
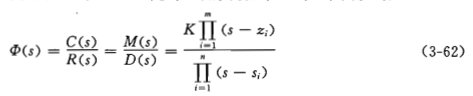
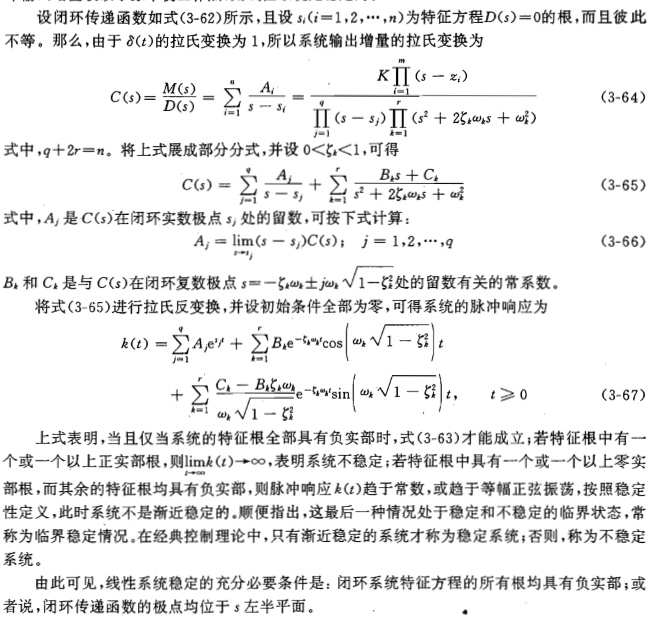
借鉴麦克斯韦的思想,结合后来提出的传递函数的概念,人们审视了传递函数的基本形式,发现了如果传递函数的极点位于左半平面时,系统往往是稳定的。证明如下
(其中式3-63为t趋于无穷时脉冲响应等于零)
注释:

后来麦克斯韦的学生劳斯( Edward John Routh,1831 - 1907 )得到了更一般性的判别方法,就是著名的劳斯稳定判据。
劳斯判据_百度百科baike.baidu.com
有了稳定性的判断依据,我们可以继续实验,还是那个反应釜的温度控制,渐渐的我们有了新发现,一些系统你说他稳定吧,他也挺稳定,但总是达不到规定要求,说指标400,他到380左右就不变了,人们原先以为是时间不够,结果等了半天,还是380,这时人们就想了,会不会是系统自身的性质呢?经过一些数学推导,发现还真的是。
[图文]§3-5稳态误差的分析与计算 - 百度文库wenku.baidu.com【其他】
这个专栏属于一个概念回顾性质的专栏,对于具体的解题和计算步骤将以链接形式给出,大体规划上将按照经典控制-现代控制(本科阶段)-线性系统-非线性系统(硕博阶段)逐步深入的顺序,中间会穿插一些工程设计技巧的内容,很多概念会以不同的视角和深度重复出现。
参考文献
1、自动控制原理、胡寿松著
2、动态系统的反馈控制、Gene F. Franklin
3、控制系统设计指南,George Eills著
System control:控制理论基础(三)PID与时域分析应用zhuanlan.zhihu.com















 3512
3512











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









