






 本文详细介绍了KUKA LBR iiwa机器人的发展历史,从DLR研究所的研发背景到KUKA的商业化过程。iiwa机器人以其7自由度、高自重负载比和安全的协作特性著称。关键技术创新包括全状态反馈关节控制器和关节力矩传感器。此外,文章还提及DLR的其他相关研究项目,如collision detection和SARA robot,展示了DLR在机器人领域的领先地位。
本文详细介绍了KUKA LBR iiwa机器人的发展历史,从DLR研究所的研发背景到KUKA的商业化过程。iiwa机器人以其7自由度、高自重负载比和安全的协作特性著称。关键技术创新包括全状态反馈关节控制器和关节力矩传感器。此外,文章还提及DLR的其他相关研究项目,如collision detection和SARA robot,展示了DLR在机器人领域的领先地位。

1.iiwa机器人的发展历史
研发这款机械臂的DLR下属研究所是机器人和机电一体化研究所(DLR Institute of Robotics and Mechatronics),总体研发时间约为15年,而且作为核心研究课题超过20年,其他很多扩展课题都是依据这一系列的机械臂的核心技术展开的,第三部分也会提到一些。
要记住一个名字,这款机械臂研发的领军人物Alin Albu-Schaffer。

官方说法是DLR LBR I 于1995年设计完成,DLR LBR II 于2000年完成设计,前两代的设计用于DLR LBR III 并于2003年完成。2004年DLR LBR III就被license 给了KUKA公司,之后在KUKA 继续研发出了KUKA LBR 4 (2008年)和KUKA LBR 4+ (2010年) ,以及最终版的 KUKA LBR iiwa (2013年),分别有7公斤和14公斤两个版本。
2.产品简介及特点
- 产品组成

产品主要有4大件组成:
1-机械臂本体;
2-机器人控制柜(KUKA Sunrise Cabinet);
3-示教器(KUKA smartPAD);
4-安装KUKA Sunrise.Workbench 的开发计算机(这个是用户自己采购);
机械臂不同的使用和操作任务根据复杂度区分,由上面的3和4分别承担。
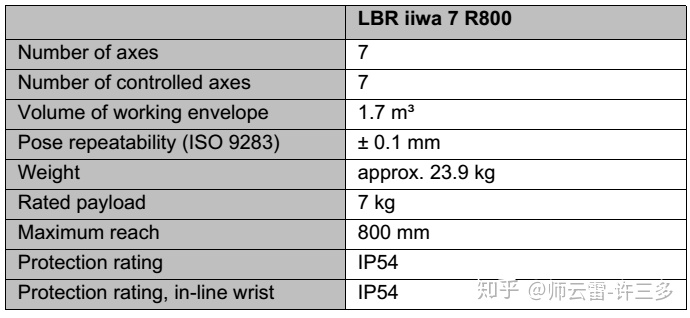
- 产品基本参数
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 696
696

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









