





上一期为大家介绍了数控机床加工工件安装与拆除Smart组件的添加与配置方法,本期再来为大家介绍一下机器人自动给料装置自动给料Smart组件的添加与配置。
一、Smart组件修改
在原有的机器人自动给料装置Smart组件feeder unit A中再添加1个Source、Queue、CollisionSensor、LineSensor、PlaneSensor、LinearMover、SimulationEvents、Attacher、Detacher、LogicSRLatch子对象组件,并对其分别重命名。

二、子对象组件属性配置
- Source子对象属性配置
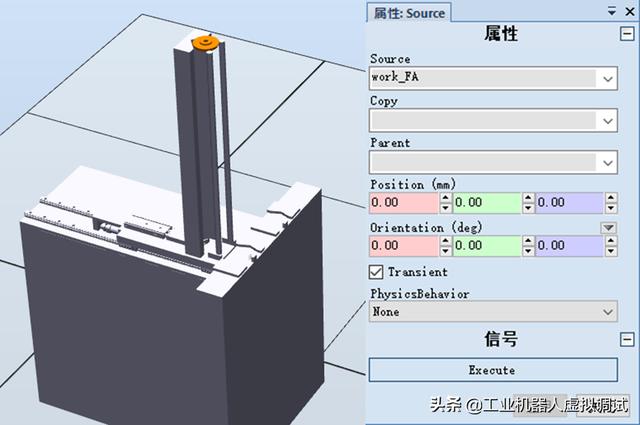
1.在配置Source子对象属性之前,首先将机器人自动给料装置feeder unit A移动到给料位置,然后添加一个工件Work_FA,将其放置到料框的最上部,并将此位置设置为工件的本地原点位置。
2.在给料装置feeder unit A上创建一个表面矩形,创建完成后将其安装到给料装置feeder unit A的L2上。

3.在Source子对象属性对话框的Source下点选添加的工件Work_FA,然后勾选Transient。
- LinearMover子对象属性配置
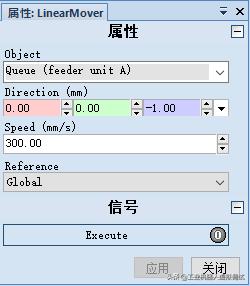
配置LinearMover子对象属性,Object下点选feeder unit A中的Queue,Direction下的Z坐标位置处输入-1,Speed下设置移动速度为300mm/s。
- Attacher子对象组件配置
配置Attacher子对象组件,在Parent下点选feeder unit A中的推进机构L3。选择推进机构L3时,可以在软件工作区中直接点选数模L3。

- PlaneSensor子对象组件配置
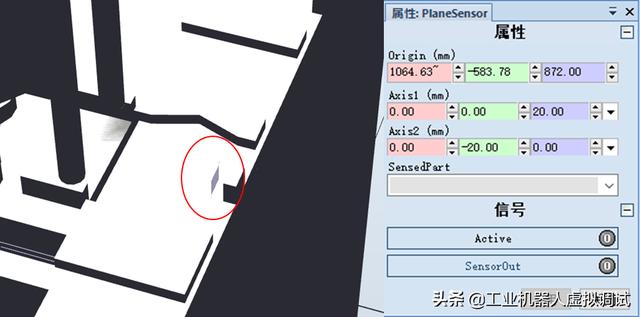
在自动给料装置的工件待抓取区域放置PlaneSensor子对象组件,组件位置能检测到工件即可。
- LineSensor子对象组件配置
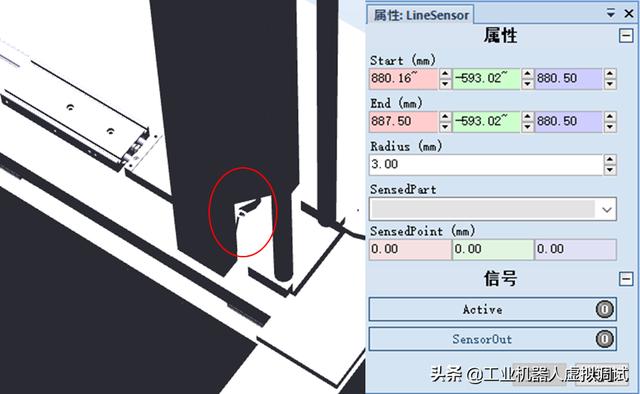
在机器人自动给料装置feeder unit A中的工件推进机构L3上放置LineSensor子对象组件,然后设置Radius为3mm,配置完成后将其安装到L3上。同时取消feeder unit A机械结构的“可由传感器检测”选项。
- PoseMover子对象组件配置
参考之前的文章,配置PoseMover子对象组件属性,这里不再赘述。

- LogicGate子对象组件属性配置
参考之前的文章,配置LogicGate子对象组件属性,这里也不再赘述。

其他子对象组件的属性保持默认配置。
三、Smart组件属性与连结配置
为机器人自动给料装置feeder unit A配置Smart组件的属性与连接关系,详细配置如下图所示。

四、Smart组件信号和连接配置
1.为Smart组件添加控制生成工件信号SM_FAW_C与控制给料机构进给的信号SM_FYA_C,以及各自的到位反馈信号SM_FWA_R、SM_FYA_R。

2.配置Smart组件的信号连接,配置完成后如下图所示,感兴趣的小伙伴可以理一理详细控制逻辑关系。

五、仿真运行
1.参考上述步骤,修改机器人自动给料装置的feeder unit B侧的Smart组件。
2.软件“仿真”菜单下的“仿真设定”对话框中,勾选仿真对象下的自动给料装置Smart组件“feeder unit A”、“feeder unit B”。
2.点击“I/O仿真器”按钮,I/O信号监控面板中选择Smart组件“feeder unit A”, 然后点击“播放”按钮。
3.I/O信号监控面板中置位机器人自动给料装置feeder unit A的控制信号SM_FYA_C,此时给料装置A机构开始运行,运行到位后反馈信号SM_FYA_R置位。然后点击给料装置工件生成控制信号SM_FAW_C,可以看到给料装置自动完成给料任务,并且完成后工件到位反馈信号SM_FAW_R被置位。同理,运行自动给料装置feeder unit B,观察运行效果。
4.点击“停止”按钮停止仿真运行,然后点击“重置”按钮,恢复机器人自动给料装置原始位置,以便重新仿真运行。
The End
上一篇:Robotstudio软件:机床上下料工作站机床安装工件Smart组件添加















 3万+
3万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









