







近邻算法可以分为无监督的近邻算法和监督近邻算法。
无监督的近邻算法是很多学习方法的基础:流形学习,谱聚类算法。
监督近邻方法可以分为:分类的近邻算法(针对离散的数据集)和回归的近邻算法(连续值的数据集)
- 分类近邻算法多采用多数表决法,在训练集里和预测的样本特征最近的K个样本,预测为里面有最多类别数的类别。
- 回归近邻算法选择平均法,即最近的K个样本的样本输出的平均值作为回归预测值。
近邻算法是一种无参数的算法
近邻算法三要素:k值的选取,距离度量的方式和分类决策规则。
对于分类决策规则,一般都是使用前面提到的多数表决法。重点关注与k值的选择和距离的度量方式。
- 关于k值的选择
k值一般取较小的值,然后通过交叉验证法来选取最优的k值
- 关于距离的度量方式
1.欧式距离(常用)

2. 曼哈顿距离

3.闵可夫斯基距离(Minkowski Distance)

欧式距离是闵可夫斯基距离距离在p=2时的特例,而曼哈顿距离是p=1时的特例。
分类决策规则
多数表决
KNN算法实现
最简单的:线性扫描,计算输入实例与每一个训练实例的距离,然后取出距离最近的k个进行表决。当训练集很大的时候费时。
KD-树
kd tree是一个二叉树,表示对k维空间的一个划分。
注意:KNN中的K代表特征输出类别,KD树中的K代表样本特征的维数。
KD树算法包括三步,第一步是建树,第二部是搜索最近邻,最后一步是预测。
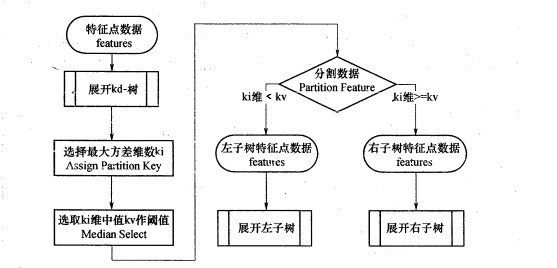
kd树构建
- 从m个样本的n维特征中,分别计算n个特征的取值的方差,用方差最大的第k维特征nk来作为排序的基准对样本进行排序
- 选择特征nk的取值的中位数对应的样本作为划分点
- 对于第k维特征的取值大于等于nk的样本,划入右子树,否则,划入左子树;对于左子树和右子树,我们采用和刚才同样的办法来找方差最大的特征来做更节点,递归的生成KD树。
流程图如下:
搜索最近邻
对于一个目标点,我们首先在KD树里面找到包含目标点的叶子节点。以目标点为圆心,以目标点到叶子节点样本实例的距离为半径,得到一个超球体,最近邻的点一定在这个超球体内部。然后返回叶子节点的父节点,检查另一个子节点包含的超矩形体是否和超球体相交,如果相交就到这个子节点寻找是否有更加近的近邻,有的话就更新最近邻。如果不相交那就简单了,我们直接返回父节点的父节点,在另一个子树继续搜索最近邻。当回溯到根节点时,算法结束,此时保存的最近邻节点就是最终的最近邻。

















 2074
2074











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











