







由于传感器种类众多,RT-Thread官方设计了传感器框架,为上层提供统一的操作接口,提高上层代码的可重用性;简化底层驱动开发的难度,只要实现简单的 ops(operations: 操作命令) 就可以将传感器注册到系统上。
本博客中
2、使用步骤处源码均出自RT-Thread官网开源项目:分布式温度监控系统
1、整体框架
Sensor 驱动框架
①为上层用户提供了标准 device 接口open/close/read/write/control;
②为驱动层提供了简单的 ops 接口:fetch_data/control
⭐使用sensor框架只需要实现ops接口,即可调用device接口对传感器进行操作。
Sensor设备其实是对标准设备rt_device的一个丰富,是在原有标准设备的基础上增加了Sensor自己独有的一部分属性和控制命令 (Type、info…)
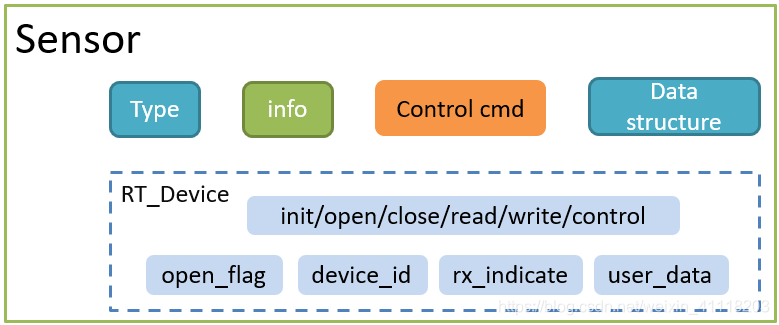
Sensor设备结构体
struct rt_sensor_device
{
struct rt_device parent; /* The standard device */
struct rt_sensor_info info; /* The sensor info data */
struct rt_sensor_config config; /* The sensor config data */
void *data_buf; /* The buf of the data received */
rt_size_t data_len; /* The size of the data received */
const struct rt_sensor_ops *ops; /* The sensor ops */
struct rt_sensor_module *module; /* The sensor module */
rt_err_t (*irq_handle)(rt_sensor_t sensor); /* Called when an interrupt is generated, registered by the driver */
};
typedef struct rt_sensor_device *rt_sensor_t;
结构体struct rt_sensor_device主要成员的意义👇

Sensor驱动框架的使用主要围绕着Sensor设备结构体struct rt_sensor_device进行配置。
2、使用步骤
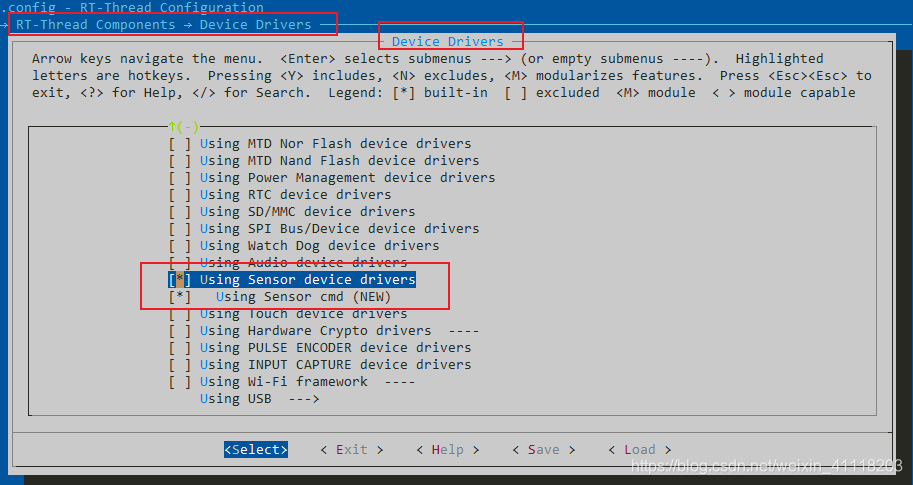
①ENV工具配置
开启Sensor驱动框架
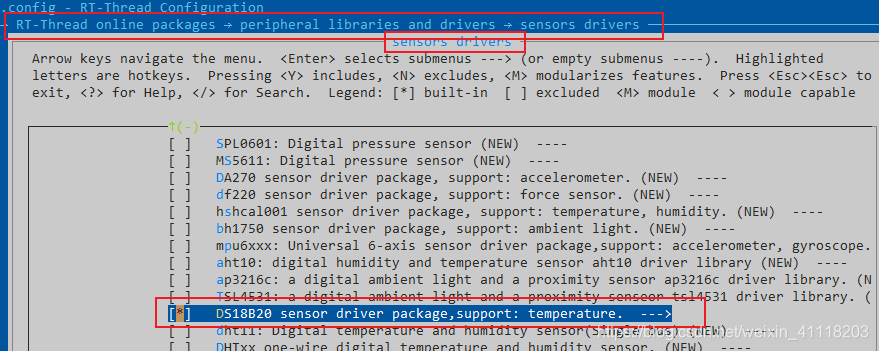
下载DS18B20驱动组件
②Sensor框架初始化
以传感器ds18b20温度传感器为例
初始化函数
static int rt_hw_ds18b20_port(void)
{
struct rt_sensor_config cfg;
cfg.intf.user_data = (void *)DS18B20_DATA_PIN;
rt_hw_ds18b20_init("ds18b20", &cfg);
return RT_EOK;
}
在rt_hw_ds18b20_init中对rt_sensor_t的成员进行初始化
int rt_hw_ds18b20_init(const char *name, struct rt_sensor_config *cfg)
{
rt_int8_t result;
rt_sensor_t sensor_temp = RT_NULL;
if (!ds18b20_init((rt_base_t)cfg->intf.user_data))
{
/* temperature sensor register */
sensor_temp = rt_calloc(1, sizeof(struct rt_sensor_device));
if (sensor_temp == RT_NULL)
return -1;
sensor_temp->info.type = RT_SENSOR_CLASS_TEMP;
sensor_temp->info.vendor = RT_SENSOR_VENDOR_DALLAS;
sensor_temp->info.model = "ds18b20";
sensor_temp->info.unit = RT_SENSOR_UNIT_DCELSIUS;
sensor_temp->info.intf_type = RT_SENSOR_INTF_ONEWIRE;
sensor_temp->info.range_max = SENSOR_TEMP_RANGE_MAX;
sensor_temp->info.range_min = SENSOR_TEMP_RANGE_MIN;
sensor_temp->info.period_min = 5;
rt_memcpy(&sensor_temp->config, cfg, sizeof(struct rt_sensor_config));
sensor_temp->ops = &sensor_ops;
result = rt_hw_sensor_register(sensor_temp, name, RT_DEVICE_FLAG_RDONLY, RT_NULL);
if (result != RT_EOK)
{
LOG_E("device register err code: %d", result);
goto __exit;
}
}
return RT_EOK;
__exit:
if (sensor_temp)
rt_free(sensor_temp);
return -RT_ERROR;
}
认真查看上面代码,发现函数先给rt_sensor_t 分配内存空间,随后初始化成员info和ops
其中的重点:要对ops中的两个函数👇进行定义与实现
static struct rt_sensor_ops sensor_ops =
{
ds18b20_fetch_data, //读取传感器数据
ds18b20_control //修改传感器配置
};
最后调用rt_hw_sensor_register函数对rt_sensor_device.parent成员进行初始化,主要包括了设备id、类型、device层接口函数
就是在这里使rt_device中接口的函数指针指向了rt_sensor中定义的函数
③创建线程
在Sensor初始化完成之后就可以创建一个读取传感器数据的线程了
ds18b20_thread = rt_thread_create("18b20tem", read_temp_entry, "temp_ds18b20",
640, RT_THREAD_PRIORITY_MAX / 2, 20);
static void read_temp_entry(void *parameter)
{
rt_device_t dev = RT_NULL;
struct rt_sensor_data sensor_data;
rt_size_t res;
dev = rt_device_find(parameter);
if (dev == RT_NULL)
{
rt_kprintf("Can't find device:%s\n", parameter);
return;
}
if (rt_device_open(dev, RT_DEVICE_FLAG_RDWR) != RT_EOK)
{
rt_kprintf("open device failed!\n");
return;
}
rt_device_control(dev, RT_SENSOR_CTRL_SET_ODR, (void *)100);
while (1)
{
res = rt_device_read(dev, 0, &sensor_data, 1);
//...
//数据处理
//...
rt_thread_mdelay(1000);
}
}
先根据传进来的传感器名称变量parameter找到设备
dev = rt_device_find(parameter);
此处以读写的方式RT_DEVICE_FLAG_RDWR打开设备
rt_device_open(dev, RT_DEVICE_FLAG_RDWR);
调用control接口修改设备配置
rt_device_control(dev, RT_SENSOR_CTRL_SET_ODR, (void *)100);
调用read接口读取传感器数据
rt_device_read(dev, 0, &sensor_data, 1);
3、源码追踪
一开始理解源码的时候,十分好奇为什么调用一个
rt_device_read函数就可以读取传感器数据,它的底层到底是怎样连接上的,接下来一步步进行追踪,不喜欢的可以跳过不看~(前方高能有点绕😵)
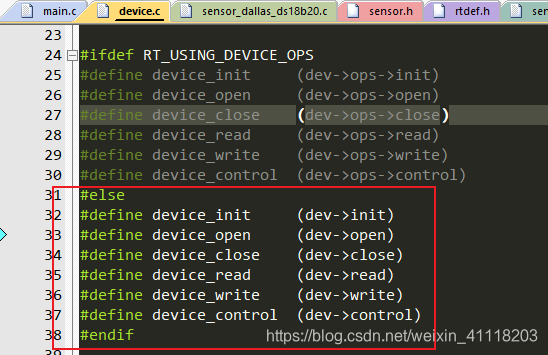
在用户定义函数read_temp_entry中,按F12去rt_device_open()的定义可以看到函数里调用了device_open(),再按F12进去就跳到了👇一处这样的宏定义,可以看出这里是调用了某处定义的函数
而我在前面提到过的rt_hw_sensor_register()函数里面,也有一处很像的赋值语句
rt_hw_sensor_register()在传感器初始化函数rt_hw_ds18b20_init()中
而rt_hw_sensor_register()函数里面正是对rt_sensor_t 里面的struct rt_device parent进行定义,而struct rt_device parent类型结构体如下👇
struct rt_device
{
struct rt_object parent; /**< inherit from rt_object */
//...
//...
//...
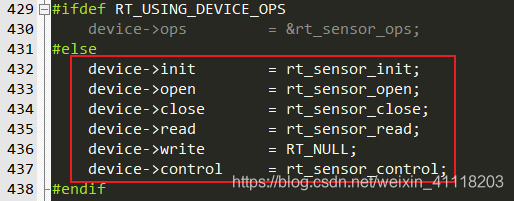
#ifdef RT_USING_DEVICE_OPS
const struct rt_device_ops *ops;
#else
/* common device interface */
rt_err_t (*init) (rt_device_t dev);
rt_err_t (*open) (rt_device_t dev, rt_uint16_t oflag);
rt_err_t (*close) (rt_device_t dev);
rt_size_t (*read) (rt_device_t dev, rt_off_t pos, void *buffer, rt_size_t size);
rt_size_t (*write) (rt_device_t dev, rt_off_t pos, const void *buffer, rt_size_t size);
rt_err_t (*control)(rt_device_t dev, int cmd, void *args);
#endif
//...
//...
//...
};
绕了一大圈之后发现
用户调用的rt_device_open()实则是调用了rt_hw_sensor_register()里面所指向的函数
此处选择rt_sensor_read()
跳转进去函数static rt_size_t rt_sensor_read(rt_device_t dev, rt_off_t pos, void *buf, rt_size_t len)
会发现里面调用了sensor->ops->fetch_data(sensor, buf, len);
这不正是我们初始化传感器时所实现的ops接口的2个函数之一吗
static struct rt_sensor_ops sensor_ops =
{
ds18b20_fetch_data, //读取传感器数据
ds18b20_control //修改传感器配置
};
结论:调用rt_device_open()几经转折之后调用的就是用户自己定义的xxx_fetch_data()函数
这兜兜转转的可把我绕懵逼了…在使用框架前一定搞清楚底层的调用逻辑,不然总感觉心底不踏实,可能是被bug折腾怕了吧~
该博客是我在学习RT-Thread官网开源项目时的总结归纳,如果觉得有用,可以点赞+收藏支持一下啊😉

















 3107
3107

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









