







目录
源文件下载
可访问底部联系方式也可前往电子校园网官网搜索关键词
关键词: ADXL345
一、实物图

二、原理图
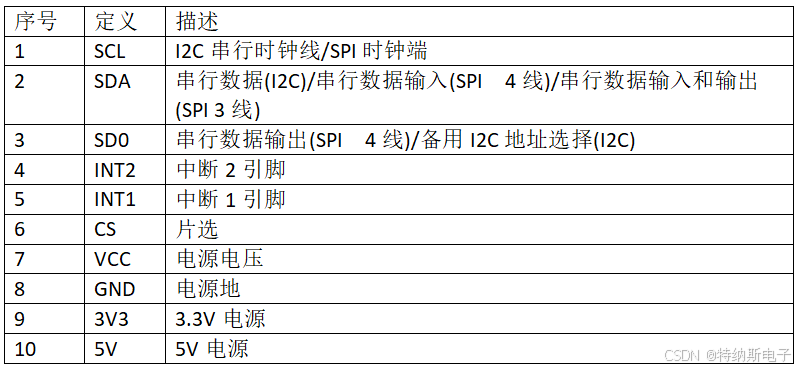
引脚定义
三、简介
ADXL345是ADI公司生产的一款数字三轴加速度计传感器。它采用了高分辨率的13位AD转换器和16位数据输出,能够测量 ±2g/±4g/±8g/±16g 四种量程范围内的加速度,具有高精度、低功耗等优点,并支持多种数字接口,可以与各种微控制器进行通讯。
ADXL345三轴加速度计传感器基于微机电系统(MEMS)技术,将微小振动转化为模拟电信号,再经过内部处理后输出数字信号。它通过检测物体在空间中的加速度及其方向,可以测量平面和立体运动状态,广泛应用于手机、游戏控制器、智能手表、健身设备、安全系统、工业自动化等领域。
基本原理
ADXL345数字三轴加速度计传感器的工作原理基于微机电系统(MEMS)技术。它采用了微小的振动结构,将物体加速度转化为机械振动,再将振动信号转化成电信号,最终通过内部处理产生数字输出。既能测量运动或冲击导致的动态加速度,也能测量静止加速度,例如重力加速度,使得器件可作为倾斜传感器使用。
具体来说,ADXL345传感器内部集成有一个微型结构,由若干个有弹性的薄膜和固定在薄膜上的质量块组成。当物体受到加速度时,质量块相应地发生位移运动并造成薄膜出现变形,在其上形成一种称为“压电效应”的局部电荷分布作用,从而产生电信号输出。这些电信号被信号调理电路进行放大、滤波和模数转换。然后输出给微控制器处理,并且以特定的格式提供给外部设备使用。
此外,ADXL345传感器还可以自由选择或切换多种测量范围,可通过I2C或SPI总线与MCU进行通讯,实现高精度和灵敏的三轴加速度测量和监测。同时对于不同的应用场合,还可以提供不同的数据输出速率、分辨率和功耗模式等选项,以满足各种应用需求。
串行通信
可采用I2 C和SPI数字通信。上述两种情况下,ADXL345作为从机运行。CS引脚上拉至VDD I/O,I2 C模式使能。CS引脚应始终上拉至VDD I/O或由外部控制器驱动,因为CS引脚无连接时,默认模式不存在。因此,如果没有采取这些措施,可能会导致该器件无法通信。SPI模式下,CS引脚由总线主机控制。SPI和I2 C两种操作模式下,ADXL345写入期间,应忽略从ADXL345传输到主器件的数据。
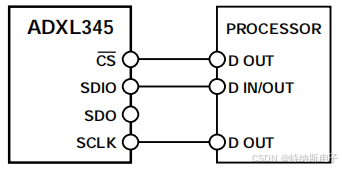
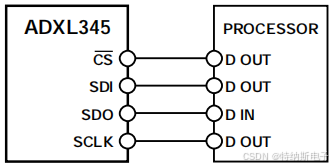
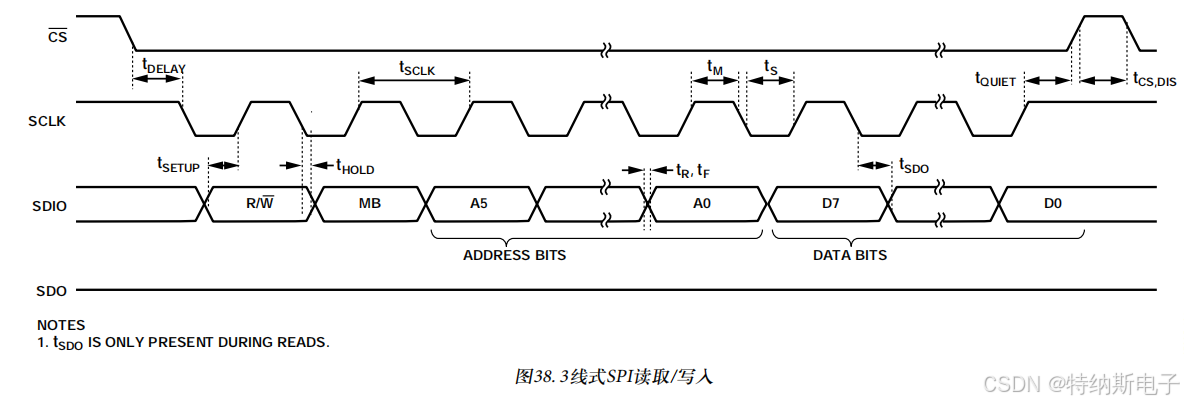
SPI
对于SPI,可3线或4线配置,如下图所示。在DATA_FORMAT寄存器(地址0x31)中,选择4线模式清除SPI位(位D6),选择3线模式则设置SPI位。最大负载为100 pF时,最大SPI时钟速度为5 MHz,时序方案按照时钟极性(CPOL)= 1、时钟相位(CPHA)= 1执行。如果主处理器的时钟极性和相位配置之前,将电源施加到ADXL345,CS引脚应在时钟极性和相位改变之前连接至高电平。使用3线SPI时,推荐将SDO引脚上拉至VDD I/O抑或通过10 kΩ电阻下拉至接地。
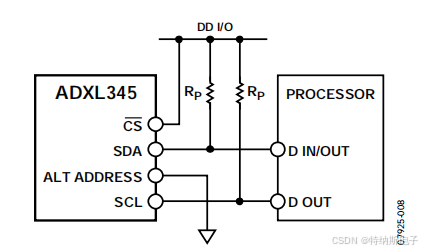
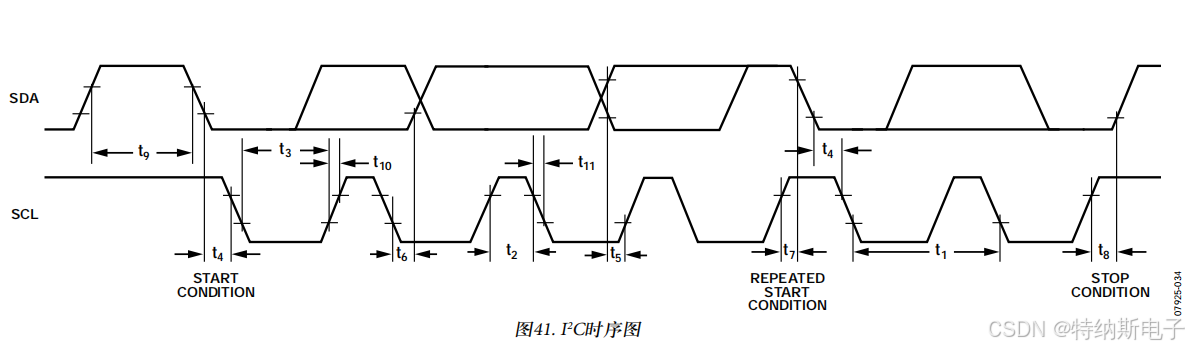
I2C
如下图所示,CS引脚拉高至VDD I/O,ADXL345处于I2 C模式,需要简单2线式连接。ADXL345符合《UM10204 I2 C总线规和用户手册》03版(2007年6月19日,NXP Semiconductors提
供)。可支持标准(100 kHz)和快速(400 kHz)数据传输模式。支持单个或多个字节的读取/写入。ALT ADDRESS引脚处于高电平,器件的7位I2C地址是0x1D,随后为R/W位。这转化为0x3A写入,0x3B读取。通过ALT ADDRESS引脚(引脚12)接地,可以选择备用I2C地址0x53(随后为R/W位)。这转化为0xA6写入,0xA7读取。对于任何不使用的引脚,没有内部上拉或下拉电阻,因此,CS引脚或ALT ADDRESS引脚悬空或不连接时,任何已知状态或默认状态不存在。使用I2 C时, CS引脚必须连接至VDD I/O,ALT ADDRESS引脚必须连接至任一VDD I/O或接地。
板载ADXL345默认I2C接口
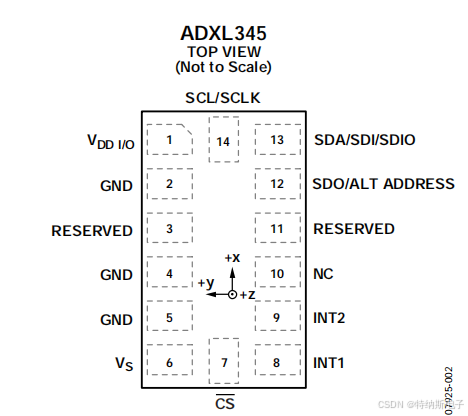
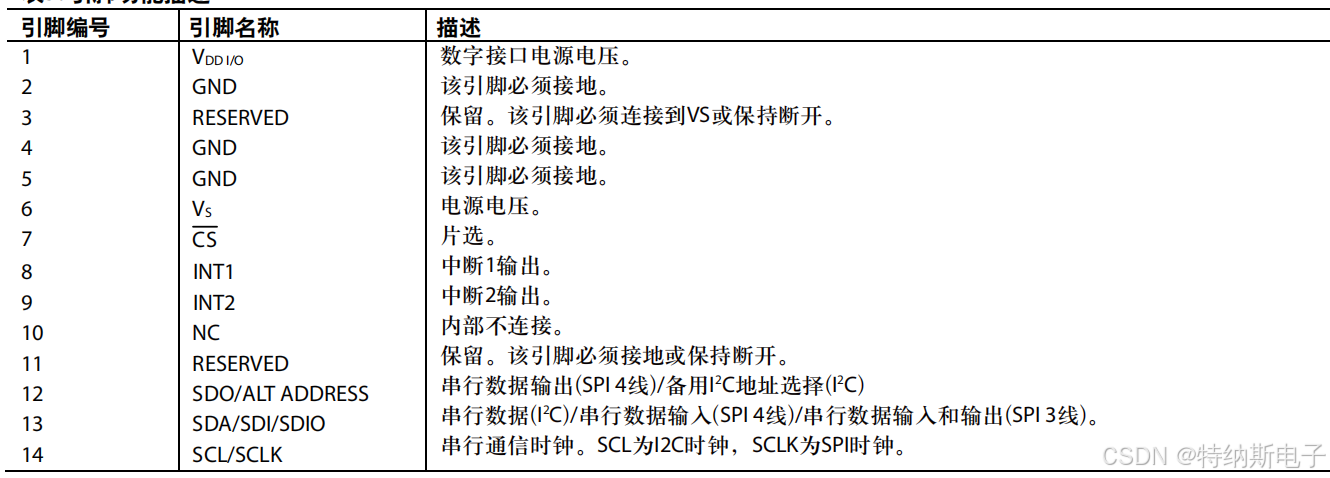
四、结构尺寸



















 9131
9131

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











