






写在最前面的话
为什么做该博客?该博客的特点是什么?
随着DeepSeek、ChatGPT等AI技术的崛起,促使机器人技术发展到了新的高度,诞生了宇树科技、特斯拉为代表的人形机器人,四足机器人等等,越来越多的科技巨头涌入机器人赛道,行业对于相关人才的需求也随之达到了顶峰。本博客的内容是替你阅读所有关于机器人的经典书籍,采用书籍瘦身计划,帮你提炼出核心内容,采用最通俗易懂的语言来解释原理,将书读薄。大大缩短学习时间,助你快速成为机器人时代的佼佼者。


文章目录
一、书籍介绍
《机器人学导论(原书第4版)》是约翰·J·克雷格的经典教材,系统讲解机器人运动学、动力学与控制理论,结合MATLAB实践,适合本科高年级与研究生学习。新增深度学习应用等内容,兼顾基础与前沿。

二、第2章 空间描述和变换(提炼总结)
2.1节 引言(提炼总结)
- 世界坐标系:定义的位置和姿态都参照这个坐标系定义
- 笛卡尔坐标系:也叫直角坐标系,它通过一组互相垂直的坐标轴和数值来精确定位点的位置
举例:
二维坐标系(平面)
由两条垂直的数轴(x轴横轴、y轴纵轴)相交于原点(0,0)。
任意点位置用有序数对 (x, y) 表示,例如 (3, 2) 表示向右3单位、向上2单位。
三维坐标系(空间)
增加第三条垂直的z轴(通常表示高度或深度)。
点位置用三元组 (x, y, z) 表示,如 (1, -2, 4)。
2.2节 描述:位置、姿态与位姿(提炼总结)
- 位置:表示物体在空间中的坐标点,通常用三维向量描述,(x,y,z),表示物体在参考坐标系中的线性位移
- 姿态:有三种描述方式
1、旋转矩阵:3×3正交矩阵,列向量为物体坐标系主轴在参考系中的投影。

2、欧拉角:(rx,ry,rz),分别绕X/Y/Z轴的旋转角度(如偏航、俯仰、滚转)
万向节死锁:当俯仰角为 ±90° 时,偏航和滚转会失去一个自由度,导致旋转异常(如航天器失控),可看上一篇文章的射击飞行员的例子
3、四元数:可以看作复数的高维扩展,由一个实部和三个虚部组成,其中w表示旋转的角度,(x,y,z)表示旋转轴,通常表示为:

三种表示方法优缺点总结:

- 位姿:结合位置和姿态,完整描述物体的空间状态,有两种描述方式
1、齐次变换矩阵:4×4矩阵,整合平移和旋转:

2、位姿向量:(x,y,z,rx,ry,rz),直接组合位置和欧拉角 - 位置、姿态、位姿关键区别:位置仅需3个自由度(坐标值),姿态需3个旋转参数,而位姿共需6个自由度(3平移+3旋转)
2.3节 映射:从一个坐标系到另一个坐标系的变换(提炼总结)
- 映射:不同坐标系之间的变换数学方法
- 坐标平移:{A}与{B}的姿态相同,不同的只是平移

- 坐标旋转:两个坐标系的原点重合

- 一般变换:即坐标旋转+坐标平移

2.4节 算子:平移、旋转和变换(提炼总结)
- 算子:用于坐标系间点的映射的通用数学表达式,包括平移算子、矢量旋转算子和平移加旋转算子
2.5节 算子:总结和说明(提炼总结)
- 齐次变换矩阵:用于描述刚体运动(旋转+平移)的核心数学工具。它将三维空间中的位姿(位置和姿态)统一表示为4×4矩阵形式,便于进行连续的变换计算。
一个标准的齐次变换矩阵 T 包含以下部分:

为什么叫“齐次”?
引入齐次坐标(增加一个维度,通常为1),使得非线性变换(如透视投影)也能用线性矩阵表示。
齐次坐标下,点 (x,y,z)(x,y,z) 表示为 (x,y,z,1)(x,y,z,1),向量为 (x,y,z,0)(x,y,z,0)。
2.6节 变换的计算(提炼总结)
- 逆变换:已知坐标系{B}相对于坐标系{A},求坐标系{A}相对于坐标系{B}

2.7节 变换方程(提炼总结)
2.8节 其他姿态描述(提炼总结)
- X-Y-Z固定角:将坐标系{B}和一个已知参考坐标系{A}重合,将坐标系{B}绕坐标系{A}的X轴旋转r角(回转角),再绕坐标系{A}的Y轴旋转β角(俯仰角),最后绕坐标系{A}的Z轴旋转α角(偏转角),因为旋转是在固定的参考坐标系{A}确定的,所以叫固定角

- Z-Y-X欧拉角:将坐标系{B}和一个已知参考坐标系{A}重合,将坐标系{B}绕坐标系{B}的Z轴旋转α角,再绕坐标系{B}的Y轴旋转β角,最后绕坐标系{B}的X轴旋转r角,每次都是绕运动坐标系{B}的各轴旋转而不是绕固定坐标系{A}的各轴旋转,这样三个一组的旋转称为欧拉角。

- Z-Y-Z欧拉角:将坐标系{B}和一个已知参考坐标系{A}重合,将坐标系{B}绕坐标系{B}的Z轴旋转α角,再绕坐标系{B}的Y轴旋转β角,最后绕坐标系{B}的Z轴旋转r角,每次都是绕运动坐标系{B}的各轴旋转而不是绕固定坐标系{A}的各轴旋转,这样三个一组的旋转称为欧拉角。
- 欧拉参数:用于表示三维旋转,避免欧拉角的万向节死锁问题。通常由四个参数组成。欧拉参数本质上是单位四元数
2.9节 自由矢量的变换(提炼总结)
- 线矢量:被约束在一条固定方向与位置的直线上,仅允许沿该直线移动
- 自由矢量:可在空间中自由平移,仅需保持大小和方向不变即视为等价
2.10节 计算问题(提炼总结)
三、实战
问题:用Z-Y-X(α-β-γ)欧拉角约定表示法,写出MATLAB程序,当用户输入欧拉角α-β-γ时,计算旋转矩阵。
解答:
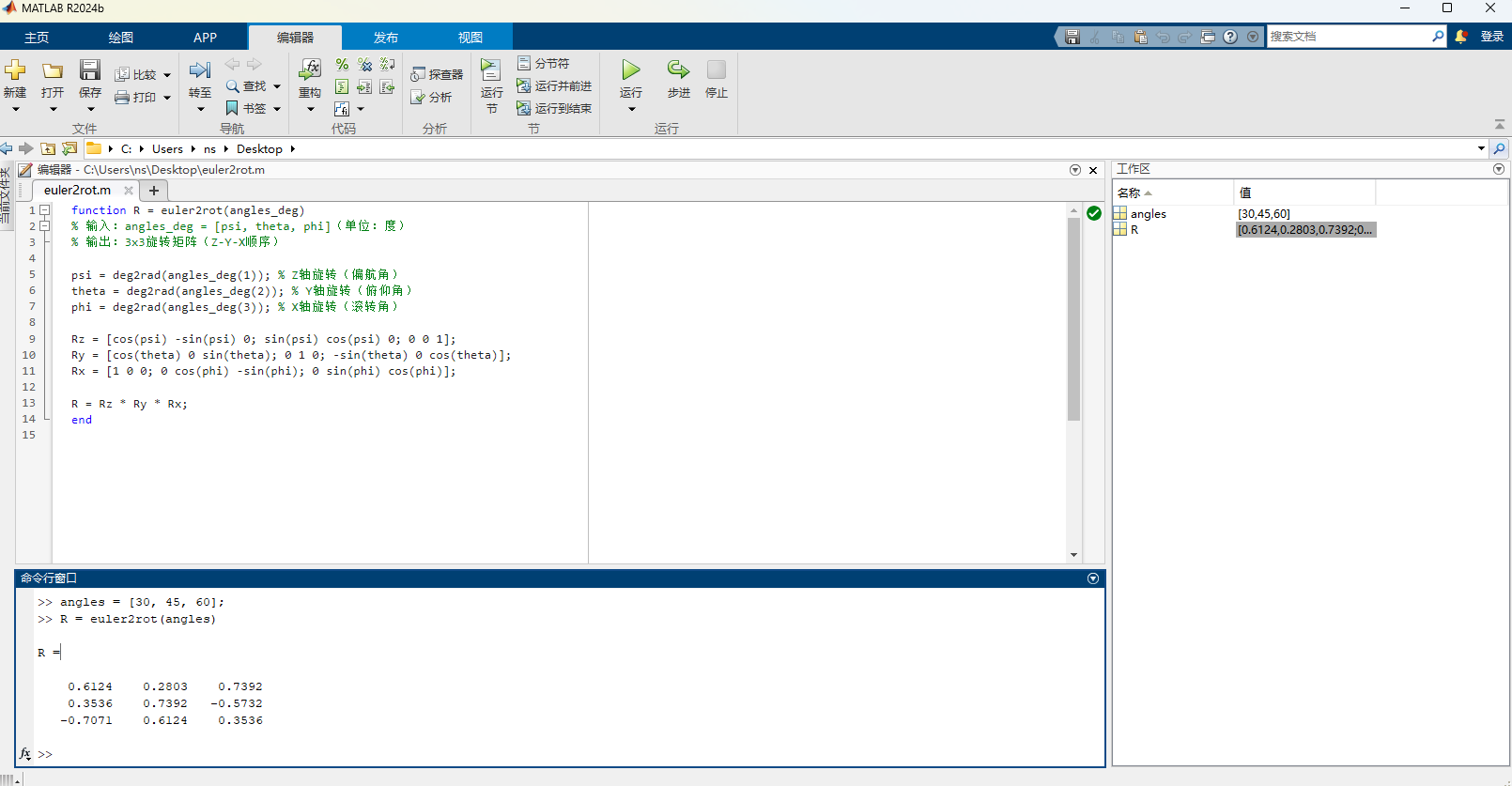
1、在matlab中编写如下代码:
function R = euler2rot(angles_deg)
% 输入:angles_deg = [psi, theta, phi](单位:度)
% 输出:3x3旋转矩阵(Z-Y-X顺序)
psi = deg2rad(angles_deg(1)); % Z轴旋转(偏航角)
theta = deg2rad(angles_deg(2)); % Y轴旋转(俯仰角)
phi = deg2rad(angles_deg(3)); % X轴旋转(滚转角)
Rz = [cos(psi) -sin(psi) 0; sin(psi) cos(psi) 0; 0 0 1];
Ry = [cos(theta) 0 sin(theta); 0 1 0; -sin(theta) 0 cos(theta)];
Rx = [1 0 0; 0 cos(phi) -sin(phi); 0 sin(phi) cos(phi)];
R = Rz * Ry * Rx;
end
2、在命令行窗口输入如下代码:
angles = [30, 45, 60];
R = euler2rot(angles)
3、观察显示结果:对于输入的欧拉角(偏航、俯仰、滚转),得到的旋转矩阵
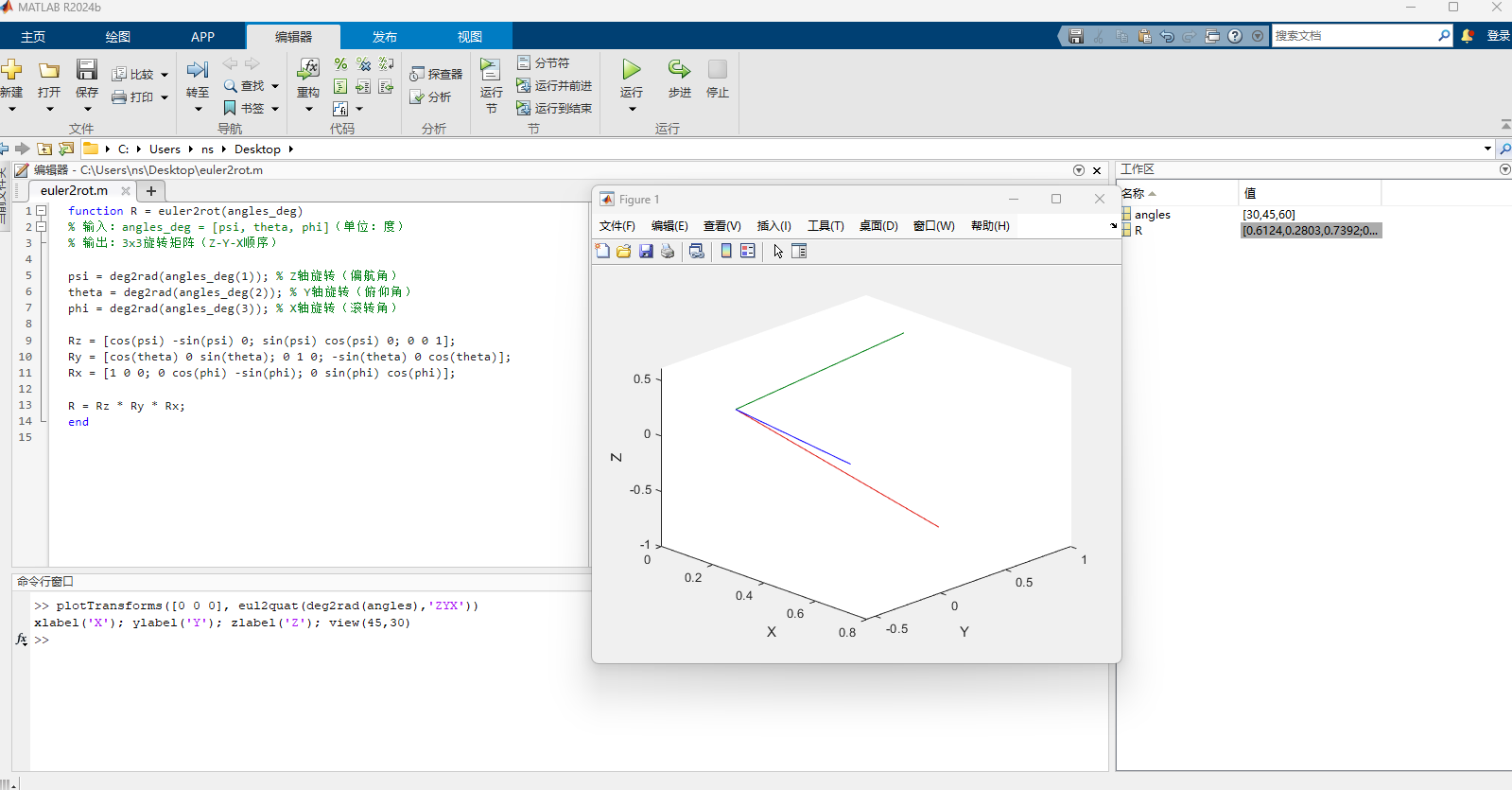
4、可视化显示,在命令行窗口输入:
将显示一个3D坐标系,红色/绿色/蓝色箭头分别对应旋转后的X/Y/Z轴
plotTransforms([0 0 0], eul2quat(deg2rad(angles),'ZYX'))
xlabel('X'); ylabel('Y'); zlabel('Z'); view(45,30)

















 7222
7222

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









