




UART: Universal Asynchronous Receiver Transmitter
即通用异步收发器
是一种通用的串行、异步通信总线,该总线有两条数据线,可实现全双工的发送和接收。
在此之前,介绍一下什么是串行,什么是异步,什么是全双工。常用于主机和辅助设备之间的通信。
通信方式分类:-------硬件间的通信
1、按每个时刻传输的位数
串行通信:每个时刻传输一位
并行通信:每个时刻传输多位
2、按通信过程是否需要时钟信号同步
同步通信:通信双方需要同一个时钟信号进行时序上的同步
异步通信:通信双方不需要同一时钟信号进行时序上的同步
3、按同一时刻可支持的传输方向分为
全双工:A向B传输同时B可以向A传输
半双工:一个时间段A只能向B传输,但另一个时段B也可以向A传输
单工:任何时刻只能A向B传输
通信基础 ----波特率
波特率用于描述UART通信时的通信速度,单位是bps(bit per second)即每秒传输bit的数量

从起始位到停止位为一帧
UART一般发送数据位是5--8位,而且以低位优先发送(LSB)。什么是低位优先,举个栗子:10101010,这8位数据通过UART发送时,顺序是01010101。
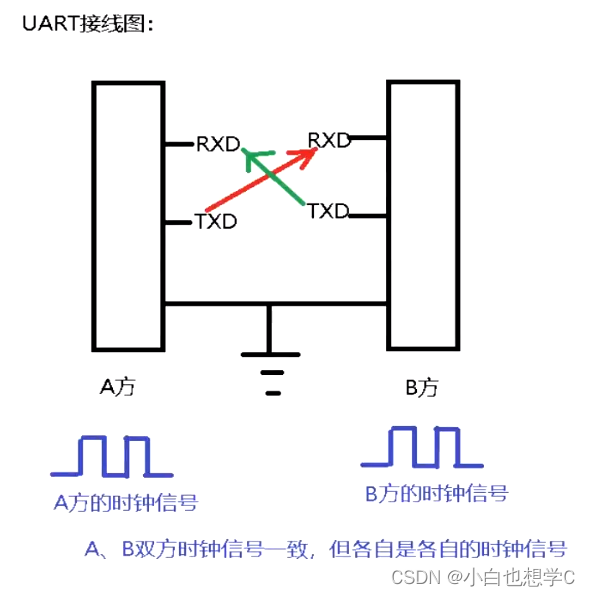
TXD:发送端引脚
RXD:接收端引脚
A-TXD、B-RXD空闲时:都为高电平
A-TXD变为低电平:起始信号A通知B准备开始接收数据
后面紧跟发送的数据:数据的位数双方需要协商好
再紧跟奇偶校验位:可有可无,用来检查传输数据的正确性
再紧跟停止位:通知接收方本帧数据发送完毕,停止位始终是高电平,停止位占用的周期数双方也需要协商好。
此外,通信双方还需协商好统一的时钟信号频率 ------波特率,传输速度 bps

















 549
549

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









