







 本文介绍了在使用倍福AX5000驱动器时遇到的两个常见问题:一是双驱龙门轴一上使能即出现大量跟随误差并报警1744;二是轴使能后耦合点动报警。解决方案包括避免同时使能两个轴,确保单轴成功后再进行另一个轴的使能,以及检查NC轴配置,确保编码器数值一致,防止位置跟随误差过大导致报警。
本文介绍了在使用倍福AX5000驱动器时遇到的两个常见问题:一是双驱龙门轴一上使能即出现大量跟随误差并报警1744;二是轴使能后耦合点动报警。解决方案包括避免同时使能两个轴,确保单轴成功后再进行另一个轴的使能,以及检查NC轴配置,确保编码器数值一致,防止位置跟随误差过大导致报警。
- 操作流程
1.1. 问题描述
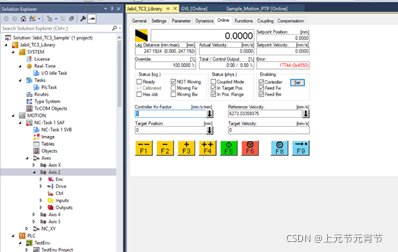
双驱龙门的轴一上使能就有两百多跟随误差的,然后就报警1744,用的AL2600直线电机,AX5000驱动器。还有一种情况是,两个能使能,但做耦合,是前面是能够使能的,然后耦合完成,点动之后就报警了。现在两个轴使能也断了,但是再次使能就报错了
1.2. 解决方案
(1)使能就报警的原因
这种情况应该是找的磁偏角不是最佳角度,上使能报跟随误差过大。主从轴同时上使能,同时找磁偏角,主从同时左右摆动,造成找磁偏角失败报错。因此在龙门轴使能过程中,需要确保其中一个轴使能成功后,再进行另一个轴的使能,并且两个轴不能同时使能,否则会有两边有憋住的风险。
(2)使能之后点动一下就报警的原因
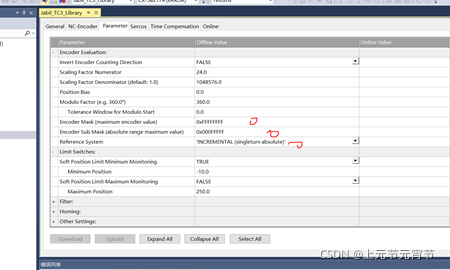
再客户现场众,是移植了一个框架程序过去,虽然IO的配置硬件参数是复制过去的,但是NC轴的配置没有复制,导致编码器的数值不一致,导致NC指令走的脉冲换算不合理,就会使得两个轴的位置跟随误差太大导致报警。就是配置的时候,除了硬件IO复制,也要确保NC这边的参数。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











