






提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
目录
一、深度学习平台介绍
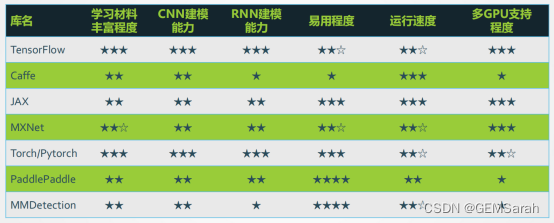
随着人工智能的蓬勃发展,诸多深度学习平台被开发和广泛应用,下图介绍以Tensorflow和Pytorch为主流的多种深度学习平台。

二、卷积神经网络基础
1. 进化史
下图呈现了卷积神经网络的进化过程,起点是神经认知机模型,此时已经出现了卷积结构,经典的LeNet诞生于1998年。然而之后CNN的锋芒开始被SVM等手工设计的特征盖过。随着ReLU和dropout的提出以及GPU和大数据带来的历史机遇,CNN在2012年迎来了历史突破--AlexNet. 更多详细分析可参考: 卷积神经网络-进化史 | 从LeNet到AlexNet - 腾讯云开发者社区-腾讯云

2. 基本概念
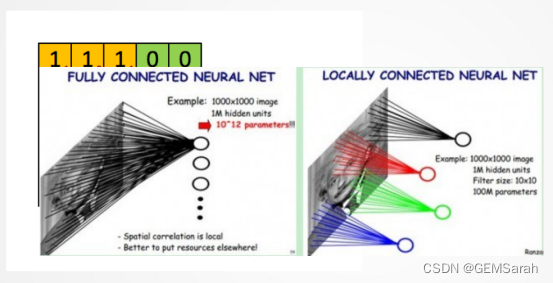
<1> 全连接网络:链接权过多,难算难收敛,同时可能进入局部极小值,也容易产生过拟合问题 (e.g. 输入为96x96图像,要学习100个特征)
<2> 局部连接网络:顾名思义,只有一部分权值连接。部分输入和权值卷积
<3> 特征提取:特征提取是计算机视觉和图像处理中的一个概念。它指的是使用计算机提取图像信息,决定每个图像的点是否属于一个图像特征。特征提取的结果是把图像上的点分为不同的子集,这些子集往往属于孤立的点、连续的曲线或者连续的区域。
<4> 填充(Padding):在矩阵的边界上填充一些值,以增加矩阵的大小,通常用0或者复制边界像素来进行填充。
<5> 步长(Stride):卷积核移动的长度。
<6> 多通道卷积:输入彩色图像,一般都是RGB三个通道(channel)的,因此输入数据的维度一般有三个(长,宽,通道) 内容详细解析: http://t.csdn.cn/6kQbr
3. 卷积神经网络结构
卷积神经网络(Convolutional Neural Networks,CNN)是由纽约大学的Yann Lecun于1998年提出的,其本质是一个多层感知机,它是一类包含卷积计算且具有深度结构的前馈神经网络(Feedforward Neural Networks),是深度学习(Deep Learning)的代表算法之一。卷积神经网络是一种特殊的多层神经网络,像其它的神经网络一样,卷积神经网络也使用一种反向传播算法来进行训练,不同之处在于网络的结构。

学习算法简介如下:


4. LeNet-5网络
LeNet-5由LeCun等人提出于1998年提出,是一种用于手写体字符识别的非常高效的卷积神经网络。出自论文《Gradient-Based Learning Applied to Document Recognition》
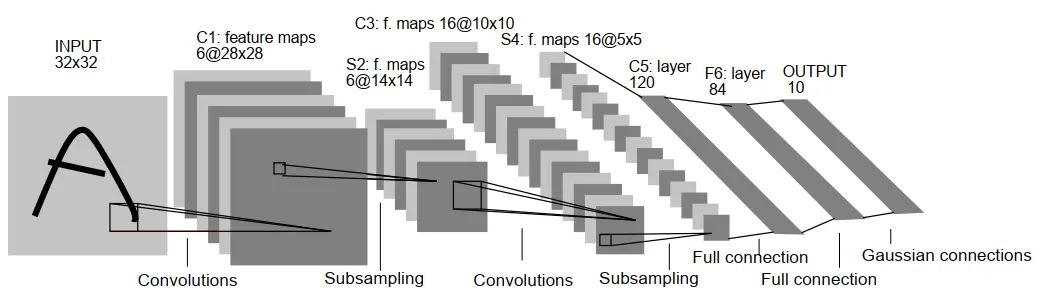
LetNet-5是一个较简单的卷积神经网络。上图显示了其结构:输入的二维图像(单通道),先经过两次卷积层到池化层,再经过全连接层,最后为输出层。整体上是:input layer->convulational layer->pooling layer->activation function->convulational layer->pooling layer->activation function->convulational layer->fully connect layer->fully connect layer->output layer.
整个 LeNet-5 网络总共包括7层(不含输入层),分别是:C1、S2、C3、S4、C5、F6、OUTPUT。具体每个层的详细介绍可参考: http://t.csdn.cn/WtwiI
LeNet5代码实现如下:
import torch
from torch import nn
from d2l import torch as d2l
class Reshape(torch.nn.Module):
def forward(self, x):
return x.view(-1, 1, 28, 28)
net = torch.nn.Sequential(
Reshape(),
nn.Conv2d(1, 6, kernel_size=5, padding=2), nn.Sigmoid(),
nn.AvgPool2d(kernel_size=2, stride=2),
nn.Conv2d(6, 16, kernel_size=5), nn.Sigmoid(),
nn.AvgPool2d(kernel_size=2, stride=2),
nn.Flatten(),
nn.Linear(16 * 5 * 5, 120), nn.Sigmoid(),
nn.Linear(120, 84), nn.Sigmoid(),
nn.Linear(84, 10))
三、基本卷积神经网络
1. AlexNet
AlexNet网络结构相对简单,使用了8层卷积神经网络,前5层是卷积层,剩下的3层是全连接层,具体如下所示:

特点: (1) 池化层均采用最大池化; (2) 选用ReLU作为非线性环节激活函数; (3) 网络规模扩大,参数数量接近6000万; (4) 出现“多个卷积层+一个池化层”的结构。
AlexNet代码复现如下:
import time
import torch
from torch import nn, optim
import torchvision
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
class AlexNet(nn.Module):
def __init__(self):
super(AlexNet, self).__init__()
self.conv = nn.Sequential(
nn.Conv2d(1, 96, 11, 4), # in_channels, out_channels, kernel_size, stride, padding
nn.ReLU(),
nn.MaxPool2d(3, 2), # kernel_size, stride
# 减小卷积窗口,使用填充为2来使得输入与输出的高和宽一致,且增大输出通道数
nn.Conv2d(96, 256, 5, 1, 2),
nn.ReLU(),
nn.MaxPool2d(3, 2),
# 连续3个卷积层,且使用更小的卷积窗口。除了最后的卷积层外,进一步增大了输出通道数。
# 前两个卷积层后不使用池化层来减小输入的高和宽
nn.Conv2d(256, 384, 3, 1, 1),
nn.ReLU(),
nn.Conv2d(384, 384, 3, 1, 1),
nn.ReLU(),
nn.Conv2d(384, 256, 3, 1, 1),
nn.ReLU(),
nn.MaxPool2d(3, 2)
)
# 这里全连接层的输出个数比LeNet中的大数倍。使用丢弃层来缓解过拟合
self.fc = nn.Sequential(
nn.Linear(256*5*5, 4096),
nn.ReLU(),
nn.Dropout(0.5),
nn.Linear(4096, 4096),
nn.ReLU(),
nn.Dropout(0.5),
# 输出层。由于这里使用Fashion-MNIST,所以用类别数为10,而非论文中的1000
nn.Linear(4096, 10),
)
def forward(self, img):
feature = self.conv(img)
output = self.fc(feature.view(img.shape[0], -1))
return output
2. VGG-16
vgg16总共有16层,13个卷积层和3个全连接层,第一次经过64个卷积核的两次卷积后,采用一次pooling,第二次经过两次128个卷积核卷积后,再采用pooling,再重复两次三个512个卷积核卷积后,再pooling,最后经过三次全连接。

特点: 网络规模进一步增大,参数数量约为1.38亿。由于各卷积层、池化层的超参数基本相同,整体结构呈现出规整的特点。随网络深入,高和宽衰减,通道数增多。代码实现如下所示:
from torch import nn
class Vgg16_net(nn.Module):
def __init__(self):
super(Vgg16_net, self).__init__()
self.layer1=nn.Sequential(
nn.Conv2d(in_channels=3,out_channels=64,kernel_size=3,stride=1,padding=1), #(32-3+2)/1+1=32 32*32*64
nn.BatchNorm2d(64),
#inplace-选择是否进行覆盖运算
#意思是是否将计算得到的值覆盖之前的值,比如
nn.ReLU(inplace=True),
#意思就是对从上层网络Conv2d中传递下来的tensor直接进行修改,
#这样能够节省运算内存,不用多存储其他变量
nn.Conv2d(in_channels=64,out_channels=64,kernel_size=3,stride=1,padding=1), #(32-3+2)/1+1=32 32*32*64
#Batch Normalization强行将数据拉回到均值为0,方差为1的正太分布上,
# 一方面使得数据分布一致,另一方面避免梯度消失。
nn.BatchNorm2d(64),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=2,stride=2) #(32-2)/2+1=16 16*16*64
)
self.layer2=nn.Sequential(
nn.Conv2d(in_channels=64,out_channels=128,kernel_size=3,stride=1,padding=1), #(16-3+2)/1+1=16 16*16*128
nn.BatchNorm2d(128),
nn.ReLU(inplace=True),
nn.Conv2d(in_channels=128,out_channels=128,kernel_size=3,stride=1,padding=1), #(16-3+2)/1+1=16 16*16*128
nn.BatchNorm2d(128),
nn.ReLU(inplace=True),
nn.MaxPool2d(2,2) #(16-2)/2+1=8 8*8*128
)
self.layer3=nn.Sequential(
nn.Conv2d(in_channels=128,out_channels=256,kernel_size=3,stride=1,padding=1), #(8-3+2)/1+1=8 8*8*256
nn.BatchNorm2d(256),
nn.ReLU(inplace=True),
nn.Conv2d(in_channels=256,out_channels=256,kernel_size=3,stride=1,padding=1), #(8-3+2)/1+1=8 8*8*256
nn.BatchNorm2d(256),
nn.ReLU(inplace=True),
nn.Conv2d(in_channels=256,out_channels=256,kernel_size=3,stride=1,padding=1), #(8-3+2)/1+1=8 8*8*256
nn.BatchNorm2d(256),
nn.ReLU(inplace=True),
nn.MaxPool2d(2,2) #(8-2)/2+1=4 4*4*256
)
self.layer4=nn.Sequential(
nn.Conv2d(in_channels=256,out_channels=512,kernel_size=3,stride=1,padding=1), #(4-3+2)/1+1=4 4*4*512
nn.BatchNorm2d(512),
nn.ReLU(inplace=True),
nn.Conv2d(in_channels=512,out_channels=512,kernel_size=3,stride=1,padding=1), #(4-3+2)/1+1=4 4*4*512
nn.BatchNorm2d(512),
nn.ReLU(inplace=True),
nn.Conv2d(in_channels=512,out_channels=512,kernel_size=3,stride=1,padding=1), #(4-3+2)/1+1=4 4*4*512
nn.BatchNorm2d(512),
nn.ReLU(inplace=True),
nn.MaxPool2d(2,2) #(4-2)/2+1=2 2*2*512
)
self.layer5=nn.Sequential(
nn.Conv2d(in_channels=512,out_channels=512,kernel_size=3,stride=1,padding=1), #(2-3+2)/1+1=2 2*2*512
nn.BatchNorm2d(512),
nn.ReLU(inplace=True),
nn.Conv2d(in_channels=512,out_channels=512,kernel_size=3,stride=1,padding=1), #(2-3+2)/1+1=2 2*2*512
nn.BatchNorm2d(512),
nn.ReLU(inplace=True),
nn.Conv2d(in_channels=512,out_channels=512,kernel_size=3,stride=1,padding=1), #(2-3+2)/1+1=2 2*2*512
nn.BatchNorm2d(512),
nn.ReLU(inplace=True),
nn.MaxPool2d(2,2) #(2-2)/2+1=1 1*1*512
)
self.conv=nn.Sequential(
self.layer1,
self.layer2,
self.layer3,
self.layer4,
self.layer5
)
self.fc=nn.Sequential(
#y=xA^T+b x是输入,A是权值,b是偏执,y是输出
#nn.Liner(in_features,out_features,bias)
#in_features:输入x的列数 输入数据:[batchsize,in_features]
#out_freatures:线性变换后输出的y的列数,输出数据的大小是:[batchsize,out_features]
#bias: bool 默认为True
#线性变换不改变输入矩阵x的行数,仅改变列数
nn.Linear(512,512),
nn.ReLU(inplace=True),
nn.Dropout(0.5),
nn.Linear(512,256),
nn.ReLU(inplace=True),
nn.Dropout(0.5),
nn.Linear(256,10)
)
def forward(self,x):
x=self.conv(x)
#这里-1表示一个不确定的数,就是你如果不确定你想要reshape成几行,但是你很肯定要reshape成512列
# 那不确定的地方就可以写成-1
#如果出现x.size(0)表示的是batchsize的值
# x=x.view(x.size(0),-1)
x = x.view(-1, 512)
x=self.fc(x)
return x
3. 残差网络
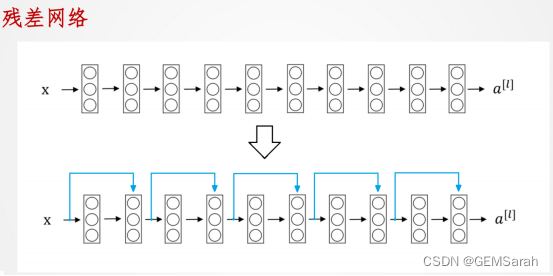
在VGG中,卷积网络达到了19层,在GoogLeNet中,网络史无前例的达到了22层。那么,网络的精度会随着网络的层数增多而增多吗?在深度学习中,网络层数增多一般会伴着下面几个问题:计算资源的消耗;模型容易过拟合;梯度消失/梯度爆炸问题的产生;因此残差网络被提出以解决此类问题。
残差网络是由一系列残差块组成。残差网络的搭建分为两步:1. 使用VGG公式搭建Plain VGG网络;2. 在Plain VGG的卷积网络之间插入Identity Mapping,注意需要升维或者降维的时候加入 1×1 卷积。详细介绍可参考:http://t.csdn.cn/sBUTh

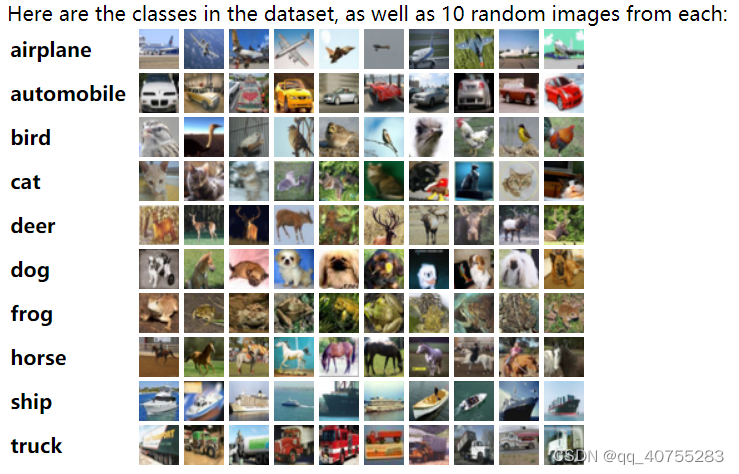
四、常用数据集
在卷积神经网络训练中,比较经典且常用的数据集包括: MNIST, Fashion-MNIST, PASCAL VOC, MS COCO, 和ImageNet等.



总结
以上就是今天要讲的内容,本文简单介绍了Tensorflow, PyTorch等深度学习平台,卷积神经网络基础,LeNet-5网络,以及AlexNet, VGG-16等基本卷积神经网络,并了解训练卷积神经网络的常用数据集。















 3446
3446











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









