






A 基础知识
A.1 5G通信模组(包含5G芯片)
无线蜂窝通信模组(以下简称模组)是将基带芯片(5G芯片)、射频芯片(用于发射和接收5G信号)、存储芯片、电容电阻等各类元器件集成到一块电路板上,提供标准接口,各类物联网终端通过嵌入物联网通信模块快速实现通信功能,核心主要是基带芯片和射频芯片,5G模组主要厂商:高通公司、联发科、英特尔、展讯、华为等;射频芯片主要厂商:村田、太诱、EPCOS、AVAGO、RFMD、SKYWORKS等
举例:如移远通信的RG500Q模组使用骁龙X55基带芯片



A.2 5G通信芯片
即基带芯片,核心主要是基带芯片和射频芯片,基带芯片决定了终端的网络能力,是用来合成即将发射的基带信号,或对接收到的基带信号进行解码,射频芯片用于接收和发送5G信号;在硬件上,5G芯片需要同时保证TD-LTE、FDD-LTE、TD-SCDMA、WCDMA、GSM多种通信模式的兼容支持,同时还需要满足运营商SA组网(独立组网)和NSA组网(非独立组网)的需求,技术难度非常大
A.3 5G NR频段
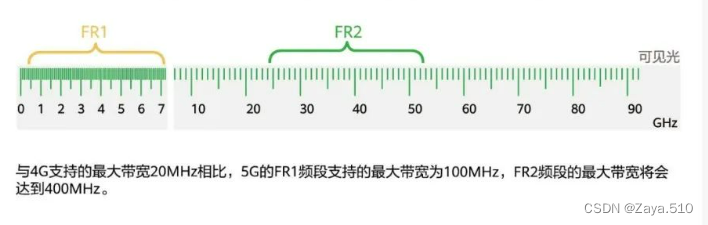
5G NR分为FR1和FR2两个频率范围

全球5G频谱分配情况:


关于亚洲的频谱分配请参看资料:史上最全无线通信频率分配表,没有之一(含最新5G NR)
A.4 天线发展

①传统“机械1.0时代”中,汽车天线是由广播AM/FM天线、GPS天线、4G通讯天线、WIFI&BT天线、ETC天线等构成。
②“智能2.0时代”汽车天线由 GPS天线升级为GNSS卫星通讯定位天线,单条4G通信天线升级为多个5G通信单元。同时,因为车联网车路协同功能需求,新增V2X多个天线模组。由于数据处理量几何倍的增加,加之车联网低延时性的需求UWB(超宽带, Ultra Wide Band)也加入到“智能2.0时代”汽车天线的构成当中。
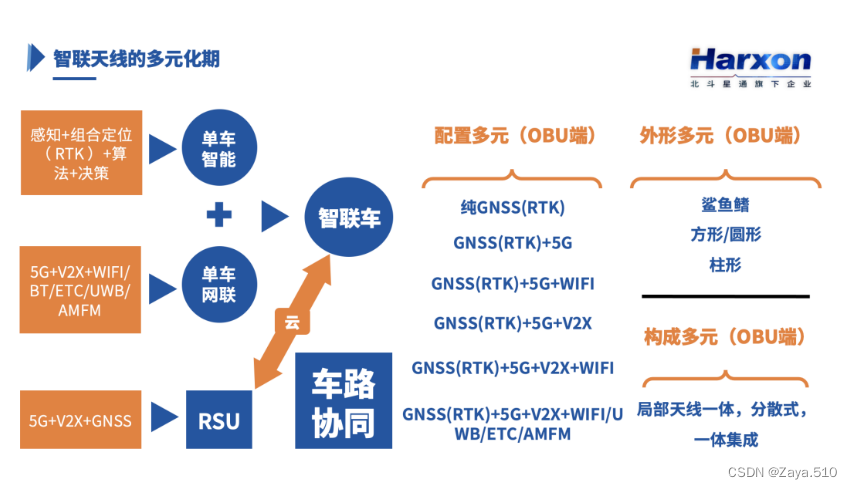
③智能天线应用难点:
要将GNSS(RTK)+5G+V2X+WIFI/UWB/ETC等多系统天线布置在车辆上,每个系统都有对应的天线,会造成各个系统间的有干扰与信号衰减问题则需要将多天线做成集成式天线,如鲨鱼鳍或玻璃天线,而不是简单的堆叠在汽车中。
A.5 无线电
1、无线电一般使用非导向传输介质电磁波,如无线电波、微波、红外线等;有线网络使用的传输介质一般为导向传输介质,如双绞线、同轴电缆(粗缆和细缆)、光纤等
1、天线对于无线通信系统来说至关重要,在日常生活中可以看到各式各样的天线,天线的主要功能可以概括为:完成无线电波的发射与接收。发射时,把高频电流转换为电磁波发射出去;接收时,将电磁波转换为高频电流,不同的电波具有不用的频谱,无线通信系统的频谱有几十兆赫兹到几千兆赫兹,包括了收音机、手机、卫星电视等使用的波段,电波都使用空气作为传输介质来传播,为了防止不同的应用之间相互干扰,就需要对无线通信系统的通信信道进行必要的管理
2、各个国家都有自己的无线电管理结构,其主要职责是负责无线电频率的划分、分配与指配、卫星轨道位置协调和管理、无线电监测、检测、干扰查处,协调处理电磁干扰事宜和维护空中电波秩序等:
①美国的联邦通信委员会(FCC);
②欧洲的典型标准委员会(ETSI);
③中国的无线电管理委员会,关于频带所使用的发射功率可在信息产业部发布的《微功率(短距离)无线电设备管理规定》中查询
3、一般情况,使用某一特定的频段霈要得到无线电管理部门的许可,各国的无线电管理部门也规定了一部分频段是对公众开放的,不需要许可即可使用,以满足不同的应用需求,这些频段包括ISM(Industrial. Scientific and Medical-工业、科学和医疗)频带。除了ISM,低于135kHz(在中国)和低于400kHz(在北美、日本等地)也是免费频段
A.6 无线电信号频谱
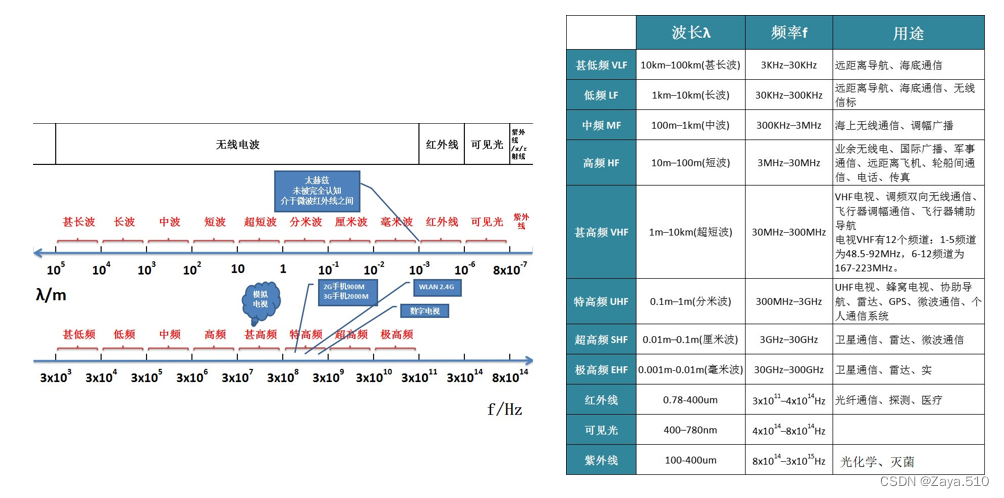
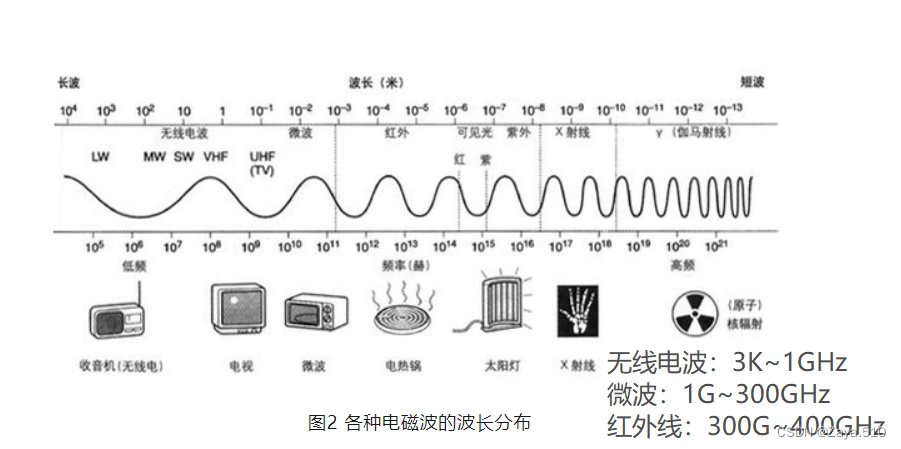
波长(一个波动的距离)=光速*无线电振荡周期时间(c*T)=光速/频率(c/f)
| 无线电波 | ●频率范围:3K~1GHz ●属于长波,易产生,全向传播,可向所有方向传播,易穿透墙壁 ●多用于AM、FM、电视、蜂窝电话、无线局域网 |
| 微波 | ●频率范围:1G~300GHz ●属于短波,在空中传播与光波类似,单向传播只能沿直线传播,遇到障碍物会被反射或阻断,无法穿透墙壁 ●常用视距(Line of Sight,LOS)通信,超过视距则需中继转发 ●多用于蜂窝电话、卫星网络、无线局域网的一对一通信 |
| 红外线 | ●频率范围:300G~400GHz ●用于短距通信,不能穿透墙壁 ●多用于电视、DVD播放等 |
A.7 评估天线性能
天线的指标参数,分为有源参数和无源参数
| 有源参数 | ●增益、效率、驻波比、回波损耗、方向图、天线隔离度 |
| 无源参数 | ●结合终端,通电情况下,获得: 发射功率、接收灵敏度、TRP、TIS、SAR等 |
各参数说明
| 增益Gain | ●定义:在同一距离及相同输入功率的条件下,某天线在最大辐射方向上的辐射功率密度Smax 和理想无方向性天线(理想点源)的辐射功率密度S0的比值,称为最大辐射方向上的增益系数,常用G表示,单位为dBi ●天线增益用来衡量天线朝一个特定方向收发信号的能力,增益的提高可以在一确定方向上增大网络的覆盖范围,或确定范围内增大增益余量,主要依靠减小垂直面向辐射的波瓣宽度,从而在水平面上保持全向的辐射能力。 ●增益是综合衡量天线能量转换效率和方向特性的参数。使用高增益天线可以在维持输入功率不变的条件下,增大有效辐射功率。 ●例如:一个增益系数为10,输入功率为1W的天线和一个增益系数为2,输入功率为5W的天线在最大辐射方向上具有同样的效果 ●关于增益单位dB,dBm,dBi,dBd,dBiC,dBV,dBmV,dB㎶ |
| 天线的效率 | 天线效率为天线辐射功率Pr与天线输入功率Pin(辐射功率与天线内所消耗的功率Ps之和)之比。还可用天线输入端的辐射电阻Ro和损耗电阻Rs表示,因此,要提高辐射效率,应设法增大辐射电阻和减小损耗电阻 |
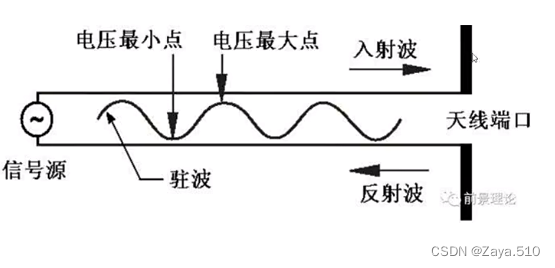
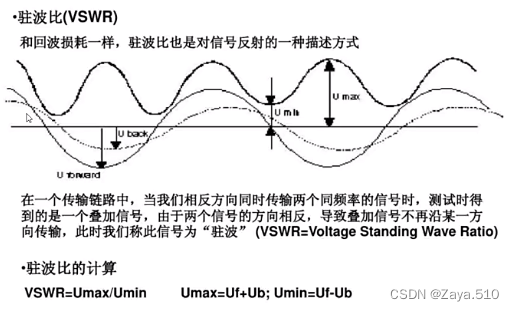
| 天线的驻波比 | ●驻波比全称为电压驻波比, 又名VSWR和SWR,为英文Voltage Standing Wave Ratio的简写。 ●在入射波和反射波相位相同的地方,电压振幅相加为最大电压振幅Vmax ,形成波腹;在入射波和反射波相位相反的地方电压振幅相减为最小电压振幅Vmin ,形成波节。其它各点的振幅值则介于波腹与波节之间。这种合成波称为行驻波。驻波比是驻波波腹处的电压幅值Vmax与波节处的电压幅值Vmin之比。在驻波管法中,测得驻波比,就可以求出吸声材料的声反射系数和吸声系数。 ●在无线电通信中,天线与馈线(电缆)的阻抗不匹配或天线与发射机的阻抗不匹配,高频能量就会产生反射折回,并与前进的部分干扰汇合发生驻波。为了表征和测量天线系统中的驻波特性,也就是天线中正向波与反射波的情况,人们建立了“驻波比”这一概念.
●SWR=R/r=(1+K)/(1-K),反射系数K=(R-r)/(R+r),(K为负值时表明相位相反)式中R和r分别是输出阻抗和输入阻抗,因此阻抗匹配的好坏会影响驻波比大小: ●驻波比:3.00:1,勉强用;1.22:1,极好的;最理想情况驻波比为1,达到阻抗完全匹配,但实际总有反射,因此驻波比越小,反射波越小,损耗越小 |
| 天线的带宽和回损 | ●天线的带宽:能满足天线特性要求的频率覆盖范围,对微带天线而言,带宽按容许的电压驻波比值确定,驻波比的典型值是2。 ●回波损耗(RL,Return Loss)指的是射频输入信号反射回来的功率与输入信号功率的比值。是以db为单位,是一个负数 ●计算公式RL=20log(|Γ|)它是反射系数绝对值的倒数。回波损耗值在0dB 到负无穷大之间,其绝对值越大表示匹配越好。0dB 表示全反射,负无穷大表示完全匹配。 ●内置天线一般要求回波损耗小于-7dB (-10dB最佳),外置天线一般小于-14dB左右,数值越低表示天线性能越好 |
| 天线的方向图 | ●天线的辐射电磁场在固定距离上随角坐标分布的图形,称为方向图。用辐射场强表示的称为场强方向图,用功率密度表示的称之功率方向图,用相位表示的称为相位方向图。 ●在方向图中,包含所需最大辐射方向的辐射波瓣叫天线主波瓣,也称天线波束。 ●决定各种天线的方向图特性的参数有:主瓣宽度,旁瓣电平,前后比,方向系数等。 ●由天线方向图可以得到方向系数,天线增益=方向系数*天线效率,因此方向系数>天线增益,天线增益主要通过方向图的测试得出,如通过暗室 ●方向图主瓣越窄,旁瓣越小,增益越高 ●通过天线方向图识别出全向天线和定向天线,全向天线即水平方向图上360°都均匀辐射,无方向性,一般情况下波瓣宽度越小,增益越大,全向天线在通讯系统中一般应用在通信距离近,覆盖范围大的场景;定向天线即在某一定角度范围辐射,即有方向性,波瓣宽度越小,增益越大,一般用于远距离通信、覆盖范围小、目标密度大、频率利用率高的环境 |
| 天线隔离度 | ●天线隔离度是指一个天线发射的信号与另一个天线所接收的信号功率的比值,决定了天线系统之间相互干扰的程度,天线隔离度越大,相互之间的干扰就越小 |
| 发射功率 | ●无线电发射机输出的射频信号,通过馈线(电缆)输送到天线,由天线以电磁波形式辐射出去,而其所发射出来给基地台的信号强度,TX是发射(Transmit)的简称,单位为dBm |
| 接收灵敏度 | ●接收机能够正确地把有用信号接收出来的最小信号接收功率,它定义了接收机可以接收到的并仍能正常工作的最低信号强度,Rx 是接收( Receive )的简称,单位为dBm |
| TRP | ●Total Radiated Power,总辐射功率 ●通过对整个辐射球面的发射功率进行面积分并取平均得到。它反映整机的发射功率情况,跟整机在传导情况下的发射功率和天线辐射性能有关 |
| TIS | ●Total Isotropic Sensitivity,总全向灵敏度 ●反映在整个辐射球面接收机接收灵敏度指标的情况。它反映了整机的接收灵敏度情况,跟整机的传导灵敏度和天线的辐射性能有关 |
| SAR | ●Specific Absorption Ratio,比吸收率 ●指单位时间内单位质量的物质吸收的电磁辐射能量。国际上通常使用SAR值来衡量终端辐射的热效应。 TRP 反映的是天线远场的辐射性能,而SAR 反映是天线的近场辐射性能。对于OTA 中的TRP指标,一般是希望其TRP比较大,这样从PA 出来进入天线的功率才被有效辐射,无线接口的连接性才比较好。在SAR 测试中,则希望TRP 数值比较小,这样被人脑吸收的功率才比较小,保证能通过SAR 测试标准。因此,TRP 指标与SAR 指标是一对相互矛盾的指标,在天线设计中如何保证两个指标都达到相关的标准,满足设计需要,在天线设计的之初就得考虑。 |
A.8 上/下行速率
DL:down link,下行速率,指基站给终端发送信息的传输速率
UL:up link,上行速率,指终端给基站发送信息的传输速率
A.9 APN
Access Point Name,是一种网络连接技术,是通讯设备上网时必须配置的一个参数,它决定了通讯设备通过哪种接入方式来访问网络,网络形式有2G/3G/4G/5G。
①电信卡名称和apn设置为:CTNET
②移动卡名称和apn设置为: ①CMNET②CMMET③CMIOT(常见的是CMIOT,如果CMIOT不能用试一下前两个)
③联通卡名称和apn设置为:①3GNET②WONET③GMTDS(如果4g信号好,选择GMTDS,如果一般选择 前两个设置完apn,一定要保存,然后返回来选中刚才新设置的apn,然后保存重启)
④任何手机不能同时用两张电信卡
⑤联通定制机不能同时用两张联通卡
⑥移动定制机不能同时用两张移动卡
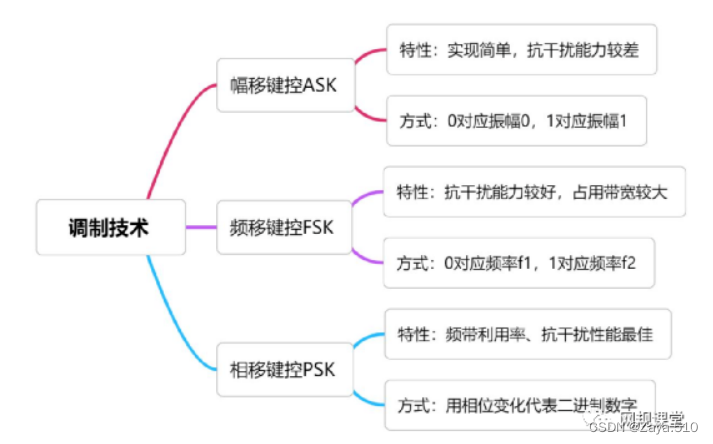
A.10 信号调制
为了保证通信效果,克服远距离信号传输中的问题,有必要将信号频谱移动到高频信道,通过调制进行传输。这种将要发送到高频信号的信号加载过程称为调制。
模拟调制:调幅(AM)、调频(FM)、调相(PM)
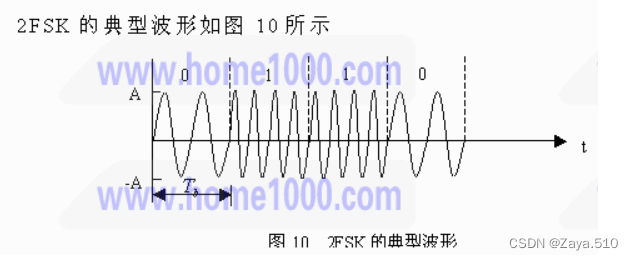
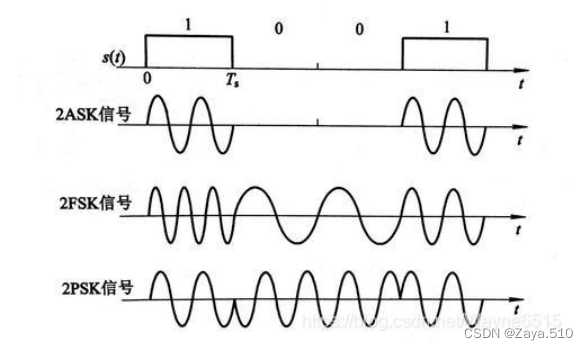
数字调制:振幅键控(ASK)、移频键控(FSK)、移相键控(PSK)、差分移相键控 (DPSK)、正交幅度调制(QAM)PSK性能最佳;QAM同时支持相位和幅度控制的
脉冲调制:脉幅调制(PAM)、脉宽调制(PWM)、脉频调制(PFM)、脉位调制(PPM)、脉码调制(PCM)、增量调制(ΔM)
| 模拟调制:调制信号和载波都是连续波的调制方式 | |
| 调幅(AM) | ●用调制信号控制载波的振幅,使载波的振幅随着调制信号变化,已调波称为调幅波。 ●调幅波的频率仍是载波频率,调幅波包络的形状反映调制信号的波形。 ●调幅系统实现简单,但抗干扰性差,传输时信号容易失真。 |
| 调频(FM) | ●用调制信号控制载波的振荡频率,使载波的频率随着调制信号变化。已调波称为调频波。 ●调频波的振幅保持不变,调频波的瞬时频率偏离载波频率的量与调制信号的瞬时值成比例。 ●调频系统实现稍复杂,占用的频带远较调幅波为宽,因此必须工作在超短波波段。抗干扰性能好,传输时信号失真小,设备利用率也较高。 |
| 调相(PM) | ●用调制信号控制载波的相位,使载波的相位随着调制信号变化。已调波称为调相波。 ●调相波的振幅保持不变,调相波的瞬时相角偏离载波相角的量与调制信号的瞬时值成比例。在调频时相角也有相应的变化,但这种相角变化并不与调制信号成比例。在调相时频率也有相应的变化,但这种频率变化并不与调制信号成比例。 ●在模拟调制过程中已调波的频谱中除了载波分量外在载波频率两旁还各有一个频带,因调制而产生的各频率分量就落在这两个频带之内。这两个频带统称为边频带或边带。位于比载波频率高的一侧的边频带,称为上边带。位于比载波频率低的一侧的边频带,称为下边带。在单边带通信中可用滤波法、相移法或相移滤波法取得调幅波中一个边带,这种调制方法称为单边带调制(SSB)。单边带调制常用于有线载波电话和短波无线电多路通信。 ●在同步通信中可用平衡调制器实现抑制载波的双边带调制(DSB-SC)。在数字通信中为了提高频带利用率而采用残留边带调制(VSB),即传输一个边带(在邻近载波的部分也受到一些衰减)和另一个边带的残留部分。在解调时可以互相补偿而得到完整的基带。 |
| 数字调制
| |
| ASK | ●Amplitude shift keying,幅移键控 ●2ASK信号在实际中虽然很少使用,但是它是研究数字调制的基础,了解2ASK就比较容易理解FSK,PSK的原理及性能 ●幅移就是把频率、相位作为常量,而把振幅作为变量,信息比特是通过载波的幅度来传递的。由于调制信号只有0或1两个电平,相乘的结果相当于将载频或者关断,或者接通,它的实际意义是当调制的数字信号"1时,传输载波;当调制的数字信号为"0"时,不传输载波。典型波形如图所示
●幅移键控的调制器可以用一个相乘器来实现。对于通断键控信号来说,相乘器则可以用一个开关电路来代替,调制信号为"1"时开关电路导通,为"0"时开关电路切断。二进制振幅键控信号由于一个信号状态始终为零,故又常称为通断键控信号(OOK信号)。 |
| FSK | ●Frequency Shift Keying,频移键控 ●频移就是把振幅、相位作为常量,而把频率作为变量,通过频率的变化来实现信号的识别。是用数字调制信号的正负控制载波的频率。当数字信号的振幅为正时载波频率为f1,当数字信号的振幅为负时载波频率为f2。有时也把代表两个以上符号的多进制频率调制称为移频键控。移频键控能区分通路,但抗干扰能力不如移相键控和差分移相键控。
|
| PSK | ●Phase Shift Keying,相移键控 ●用数字调制信号的正负控制载波的相位。如果两个频率相同的载波同时开始振荡,这两个频率同时达到正最大值,同时达到零值,同时达到负最大值,它们应处于"同相"状态;如果其中一个开始得迟了一点,就可能不相同了。如果一个达到正最大值时,另一个达到负最大值,则称为"反相"。 ●当数字信号的振幅为正时,载波起始相位取0°;当数字信号的振幅为负时,载波起始相位取180°。 ●有时也把代表两个以上符号的多相制相位调制称为移相键控。移相键控抗干扰能力强,但在解调时需要有一个正确的参考相位,即需要相干解调。
|
| QAM | ●Quadrature Amplitude Modulation,正交振幅调制 ●其幅度和相位同时变化,属于非恒包络二维调制。QAM是正交载波调制技术与多电平振幅键控的结合。 ●它同时利用了载波的幅度和相位来传递信息比特
|

A.11 比特率、波特率、带宽
比特:比特是由英文的bit音译过来的,指一个二进制数的一位就是一比特。二进制中只有两个数字,“0”和“1”,所以,“0”是一位表示1比特,“1”是一位也是1比特,所以如果一个二进制数是0101,那么这个数一共有4位,因此是4比特。比特是信息量的度量单位
比特率:单位是bps、bit/s,每秒最大可接收0、1比特(bit)的数量,比特率描述的是数据。比如千兆1000Mbit/s,即每秒可接收1000x个bit,比特率越高,每秒传送的比特数量就越多。比特数量多,意味着单位时间获取的信息就多,网速自然就越快;比特率单位可换算为Kbit/s、Mbit/s、Gbit/s分别代表1000(
)、1000000(
)、1000000000(
)(通信速率换算1Kbit/s=1000bit/s;若描述计算机存储文件大小,则1Kbit=1024bit)
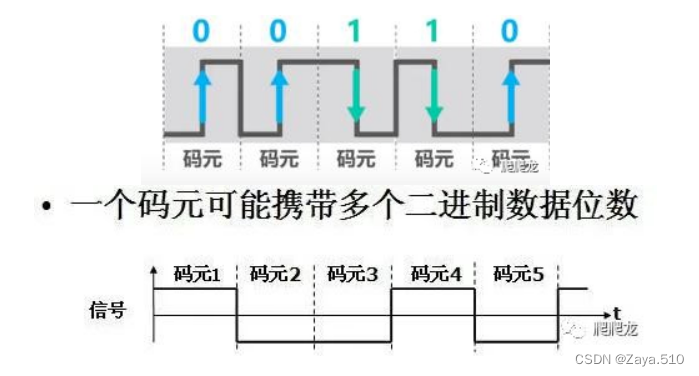
码元:在数字通信中常常用时间间隔相同的符号来表示一个二进制数字,这样的时间间隔内的信号称为(二进制)码元。通俗讲,一个码元就是一个脉冲信号,一个码元可以携带多个二进制位数。如下图所示,上升沿和下降沿都表示一个码元。
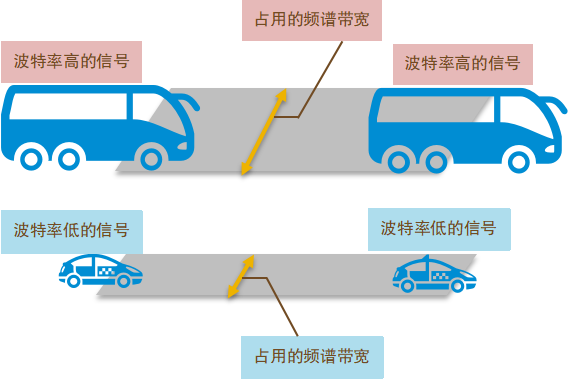
波特率:单位是Baud、B(即symbol/s),单位时间内传送的码元个数,又称为传码率。波特率描述的是信号。在通信系统中,携带数据信息的信号单元称为码元,也称为符号(symbol),设备芯片波特率≥信号波特率,通常芯片波特率有45GB、 69GB、 96GB、 128GB
类比解释:
车辆是波特,乘客是比特,一辆车可以载一名或多名乘客,车辆数决定了道路交通情况,而不是乘客数决定了道路交通情况(传输带宽)。一辆车运载的乘客越多说明运输的效率越高(传输效率)。
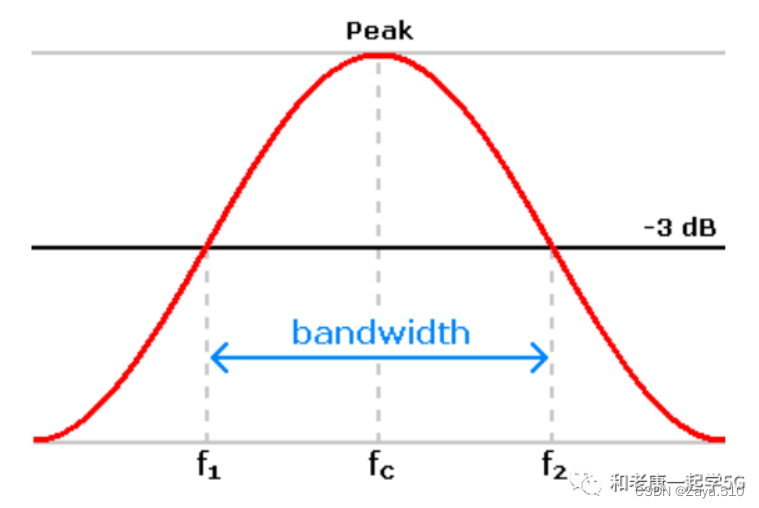
带宽:Bandwidth,带宽是传输信道占用频率的宽度,是衡量微波系统能响应多少频谱的重要指标;从低频fL到高频fH之间的频率范围来计算:Bw=fH−fL,其中fH和fL分别为最高和最低信号频率,信号所需的频谱宽度数值应大于信号波特率的1.2倍,才能保证信号可以被高质量传输。
更宽的频道在频谱中使用更多频率,并允许您听到更多说话声音的音频信号,它越宽,通话信号上下浮动空间更高,这将给它更多的偏离空间。更宽的频道通常会带来更好的音频质量。
信道间隔:每个信道彼此相距多远
一、V2X天线
1、天线介绍
1.1 法规要求
GB /T 17691,SAE/J3061,ISO 21434,HJ1239,GB/T35273
V2X标准远不止于此,还有如下:V2X相关技术标准盘点 (qq.com)
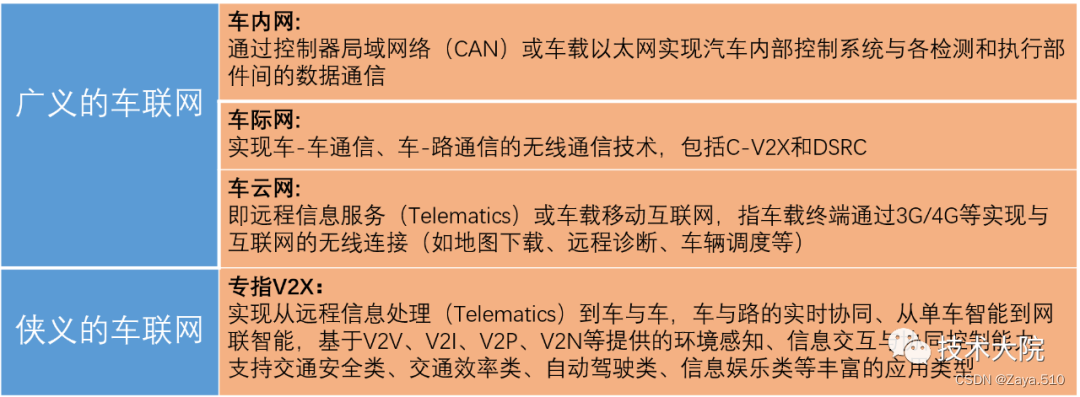
1.2 什么是车联网?
1.3 什么是V2X?
V2X,是指vehicle-to-everything,通过现代通信与网络技术,实现车与人、车、路、后台等信息交互及共享,从而实现安全、舒适、节能、高效行驶的驾驶体验。
1.4 V2X关键通信技术
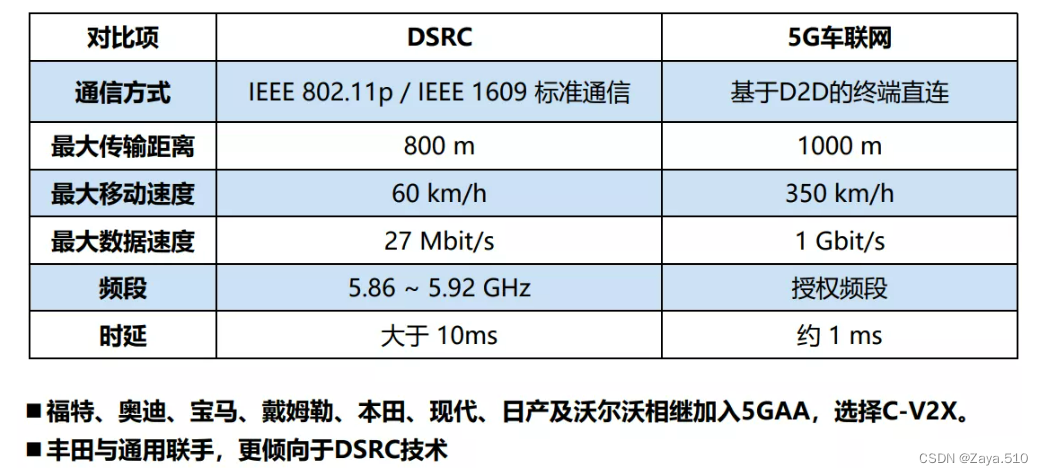
V2X技术路线分为DSRC和C-V2X,现在基本就是用C-V2X
①美国主导的DSRC(Dedicated Short Range Communications,专用短程通信),提供短距离无线传输的技术,是基于WiFi技术改进,2020年11月,美国联邦通信委员会正式投票决定将原分配给DSRC(IEEE 802.11p)的5.9GHz频段70MHz带宽划拨给Wi-Fi和C-V2X使用,标志着美国正式宣布放弃DSRC(IEEE 802.11p)并转向C-V2X。
DSRC系统包含车载单元(On Board Unit,OBU)与路侧单元(Road Site Unit,RSU)以及专用短程通讯协议,通过OBU与RSU提供车间与车路间信息的双向传输,RSU再透过光纤或行动网络将交通信息传送至后端智能运输系统平台(ITS)
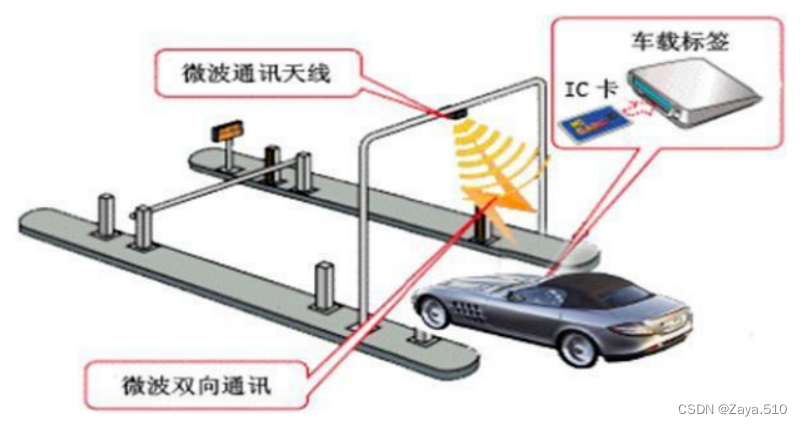
高速公路上的ETC专用通道,就是通过DSRC技术实现车辆身份识别,电子扣费,实现不停车、免取卡,实现无人值守车辆顺利通过。DSRC技术其主要承载基本交通安全业务,不能支持未来的自动驾驶。
②中国主导的C-V2X(Cellular-V2X,基于蜂窝网络的V2X),是基于蜂窝网通信技术演进形成的车用无线通信技术,通过直连通信(D2D)和蜂窝通信两种方式,支持包括车车、车路、车人以及车网等各类车联网应用。
C-V2X在通信范围、容量、车辆移动速度、抗干扰性等方面的性能,全面优于DSRC。经过对比测试的结果,LTE-V2X在通信距离(无遮拦及有遮拦两种环境)、抗干扰能力等方面的性能是DSRC的2~3倍
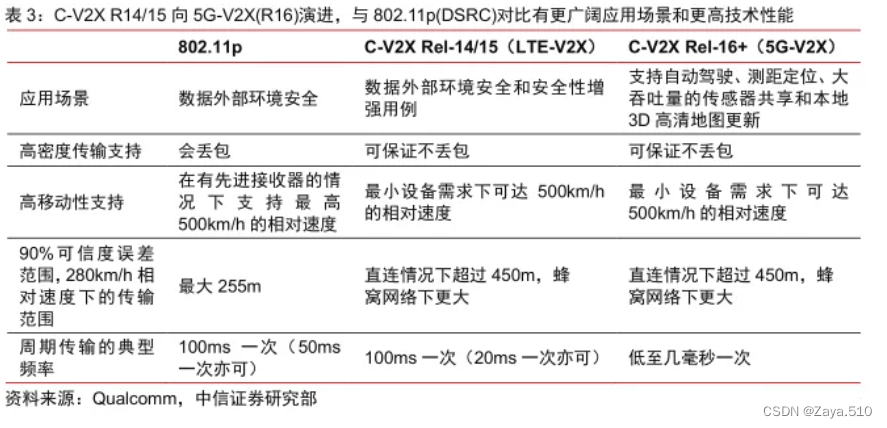
C-V2X是3GPP组织制定的全球标准,包含LTE-V2X 和5G-V2X。其中,LTE-V2X,基于4G技术,主要承载基本交通安全业务;5G-V2X,基于 5G NR 技术,主要面向承载自动驾驶业务。
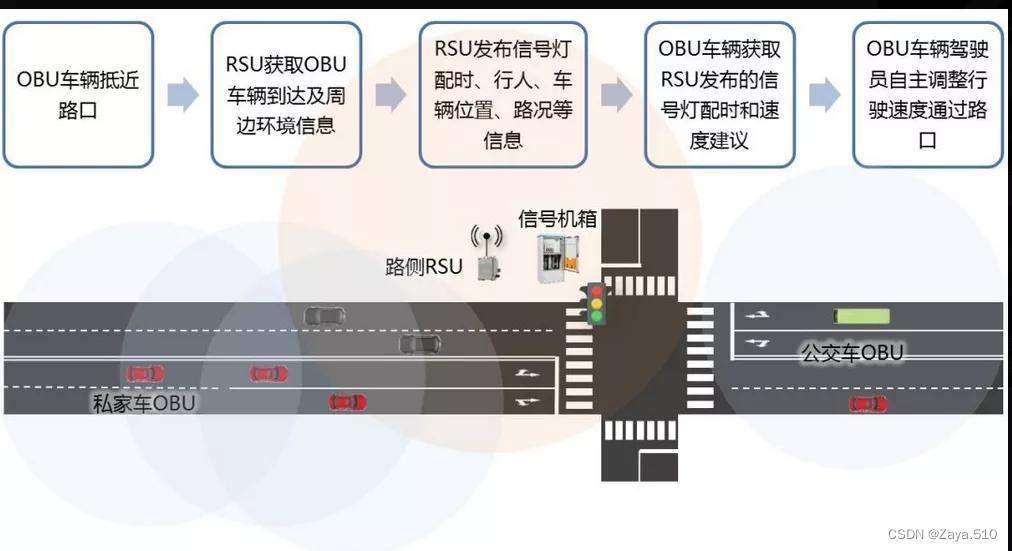
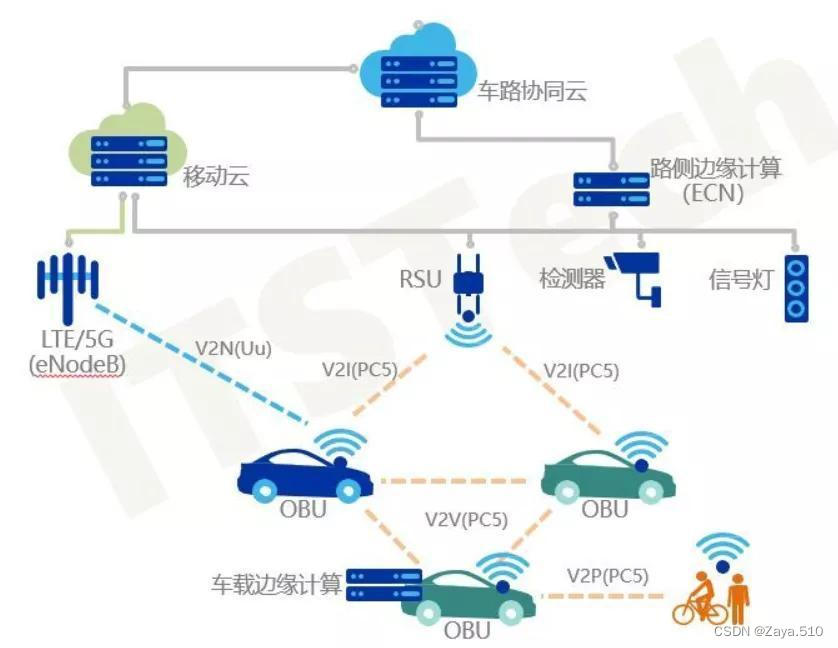
C-V2X主要包括OBU、RSU、Uu接口和PC5接口,RSU主要在覆盖范围内广播路况、信号灯、行人信息,提供时间及位置同步等,同时具有移动网络接入能力,接入车联网管理平台或云平台;Uu接口是指OBU/RSU与基站之间的接口,实现与移动网络通信;PC5接口是指OBU与OBU,OBU与RSU之间的直连通信接口,即车辆与其他设施之间不借助移动网络而直接进行通信。
1.5 OBU,RSU,云平台介绍
1.5.1 OBU介绍
OBU在汽车中就是TBOX+V2X天线即可实现,主要技术包括信息获取、信息交互、事故隐患提示等。从各类传感器和车载网络获取原始信息,并解算出典型车路协同应用需要的底层信息,通过信息交互传递至RSU。其功能包括车辆运动状态获取、行车环境信息感知、车辆定位信息获取、信息交互、信息处理及管理、安全报警与预警等
1.5.2 RSU介绍
车路协同系统的重要组成部分,其主要功能是采集当前的道路状况、交通状况等信息,通过通讯网络,将信息传递至指挥中心或路侧处理单元进行处理,并裁定相关信息通过网络传递到有相应信息请求的TBOX,辅助驾驶员进行驾驶
1.5.3 车路协同云平台
实现城市交通宏观角度下的交通大数据分析,城市级交通状态的识别与预测,智能交通协同指挥控制、出行服务与交通调度等车路协同综合应用
2、工作原理
2.1 V2I的工作原理

2.2 V2V的工作原理

2.3 通信接口方案
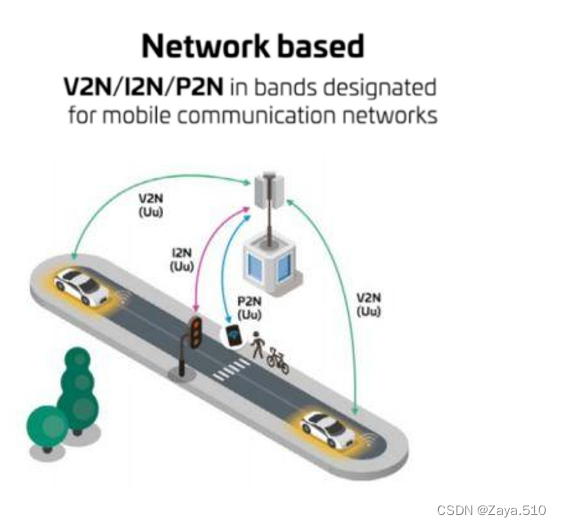
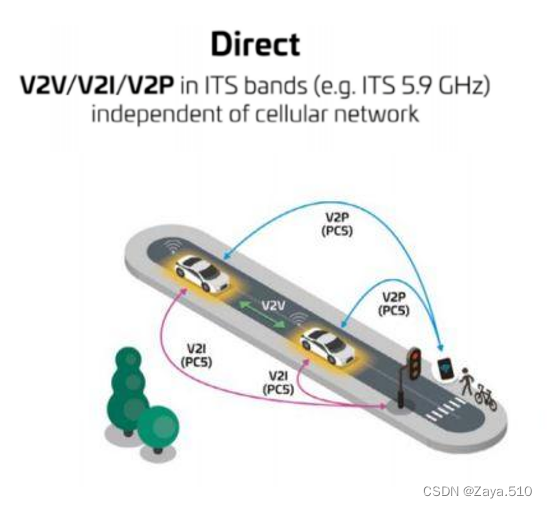
●由于V2X面临着通信距离、时延、容量、可靠性等众多问题,要同时解决,难度很大,但可以基于V2X典型应用场景做出取舍,基于此思路,C-V2X分为2种通信接口方案
●Uu接口和PC5接口,在设计中相互补充辅助冗余
| 接口1: Uu接口(U表示用户网络接口:User to Network interface,u表示通用:Universal) | ①用于终端和基站之间的通信接口,使用LTE将信息从V2X服务器广播到车辆和其他地方进行网络通信(V2N)。由基站作为集中式的控制中心和数据信息转发中心,完成集中式无线资源调度、拥塞控制和干扰协调 ②特点: ●长距离和更大范围的广域网络可靠通信 ●充分利用现有的LTE网络 ③举例: ●等红绿灯时可以通过Uu接口与基站通信,将数据传回云端,云端通过分析区域内交通数据后动态优化红绿灯的切换时长规则
|
| 接口2: PC5接口(ProSe Communication 5) | ①用于终端和终端之间的通信接口,可以实现车、人、道路基础设施之间的短距离直接通信接口,通过直连、广播、网络调度的形式实现低延时、高容量、高可靠的通信 ②特点: ●PC5接口基于ITS专用频段(比如ITS 5.9GHz),支持低时延、高可靠业务(如V2V、V2I、V2P等道路安全业务) ●近端直接通信(100多米) ③举例: ●120km/h对向行驶的两辆汽车之间可以通过PC5高速直连,避免碰撞 ●汽车等红灯时,也可以与信号灯通过PC5直接连接,提前知道该路口红绿灯剩余秒数
|
3、相关参数
3.1 5G NR C-V2X特点
①具备基于OFDM的可拓展空中接口,可高效应对多样化的频谱、部署和服务
②具有基于时隙的灵活框架,支持超可靠和低时延通信,前向兼容未来通信技术
③运用先进的信道编码,高效实现大数据块传输和千兆级吞吐量
④支持更多天线数量,实现更高的数据传输率和网络覆盖范围
⑤支持宽带载波,提高通信速率和系统容量
⑥与LTE-V2X(基于4G)类似,同样覆盖终端之间直接通信和终端与基站间通信
⑦终端设备向下兼容LTE-V2X
3.2 参数
| 蜂窝通讯 | ●支持5G NR:遵循3GPP REL-15标准 DL/UL:2Gbps/230Mbps ●支持7模全网通,支持联通和移动网络各自的2G,3G,4G,及电信的CDMA模式。支持移动4G(TDD-LTE)/联通4G(FDD-LTE)、移动3G(TD-SCDMA)/联通3G(WCDMA)/电信3G(CDMA2000)、移动2G/联通2G(GSM)/电信2G(CDMA) ●能被短信、电话唤醒 ●支持多APN ●支持出口国家频段认证(A.8中有介绍) |
| V2X | ●遵循3GPP REL-14/15/16标准,B47(频宽10MHz/20MHz,频率范围为5.855-5.925GHz),可选DSRC通信 ●支持DAY1和DAY2场景 |
4、实现方式
4.1 V2X的通信安全
①V2X应用中,涉及到V2V通讯,通讯传输不可能是随便一辆车都能与其他车通讯,否则黑客容易假冒车辆批量攻击正常行驶车辆,其中不可避免地需要应用到身份鉴权和数据加密技术,目前最主流的就是应用PKI(Public Key Infrastructure,公钥体系)非对称加密体制,在这机制下密钥都是一对一对地生成的,一对密钥包含一把公钥和一把私钥,两者之间有内在的数学关系,实现了公钥加密的信息只能用对应的私钥来解密,而私钥加密的信息只能用对应公钥来解密。而“公”是公开给大家所见的,“私”指只有自己知道
②车端和路端设备的私钥可以在生产设备时预置到控制器中的安全硬件中,而公钥则可以通过相应管理系统来公开
③虽然公钥可以公开,但需要防止有人假冒,所以需要有公信力的证书颁发机构(CA,Certificate Authority)来管理密钥信息和证书。CA主要作用就是证明这把公钥真的是属于这辆车的。
④在CA管理密钥和证书过程中,需要将这些信息和具体车辆绑定,一一对应。其中车辆的标识可以采用车辆唯一标识码(VIN)和车牌号。但出于个人信息保护的要求,VIN和车牌号这样的信息并不能随意泄露或体现在终端车辆的数字证书之中。这就是数据匿名化的需求。在总体架构上,可以如下图所示,在根CA和从属车辆管理CA之间加入假名化CA
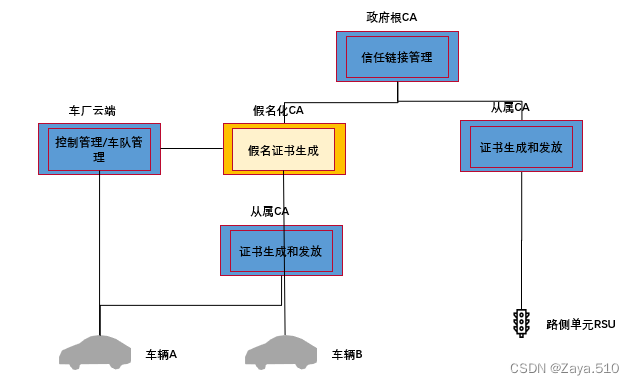
⑤假名化CA可以对接根CA和车厂云端,验证车辆个人信息之后,再为对应车辆生成一个假名化的唯一标识,也就是每辆车都通过该CA生成一个假名。从属CA再基于假名生成数字证书及公私密钥对用于V2V的鉴权和加密。
⑥与从属CA类似,假名化CA为了增强信息安全能力,也涉及到假名的生命周期管理。一种抽象化的生命周期管理框架如下图所示:
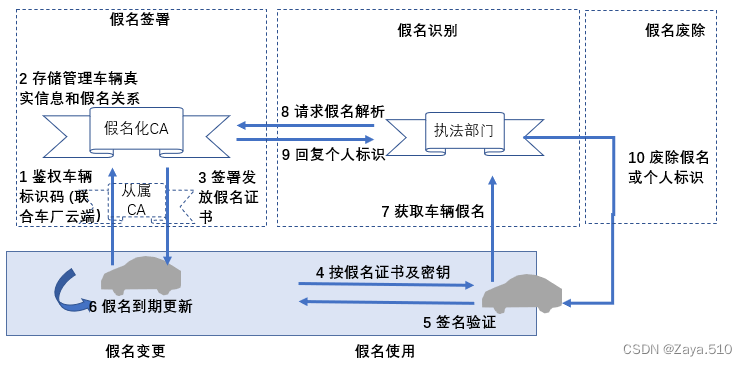
1 车辆通过VIN和车牌号等身份标识,途经从属CA,向假名化CA申请证书
2 假名化CA在鉴权车辆信息外,还会存储和管理车辆真实识别信息和生成的假名的关系数据库
3 4 5 将基于假名的数字证书发放给车辆后,车辆利用假名化数字证书及公私密钥对,完成V2V的通讯鉴权和加密
6 数字证书到期后,重新申请新的假名化数字证书
7 8 9 在特殊情况下,执法部门可以通过车辆假名,向假名化CA申请获取车辆的真实标识
10 在特殊情况下,执法部门也可以废除对应车辆的假名和数字证书等
⑦这种方案通过对假名化CA及执法部门的集中监管,可以在保证信息安全的前提下,维持假名与真实标识信息的可逆化,赋能了特殊情况下的数据可用性。
⑧针对数据需要匿名,常用的手段有:
| 遮蔽masking | ●比如字符替换和脸部遮蔽等。 ●例如,一个人的生日日期可以被 **/**/****的符号取代。又或者图像数据中的人脸用固定图形遮蔽
|
| 假名化 Pseudonymization | ●用假的标识符或假名来代替私人标识符 ●例如用“鲁迅”标识符来替换“周树人”的标识符。它可以保持统计的精确性和数据的保密性,允许改变后的数据用于创建、训练、测试和分析,同时保持数据的隐私 |
| 泛化 Generalization | ●有目的地排除一些数据,使其不那么容易识别;数据可以被修改成一系列的范围或一个具有合理边界的大区域 ●例如,一个地址的门牌号可以被删除使其不能从中识别处自然人,但街道的名称可以保留。泛化也可以理解为在保持数据准确性的前提下,删除一些标识符 |
| 混排 Scrambling | ●对数据集进行洗牌以重新排列的过程,原始数据库和结果记录之间就没有任何相似之处了,这种操作一般就是调乱数据库中的“列” ●例如将个人的年龄、生日日期、月份各列打乱 |
| 加扰 Perturbation | ●数据扰动通过应用圆周率方法或者添加随机噪声,对初始数据集进行小幅修改。这组数值必须与扰动成正比。 ●一个小的基数可能会导致匿名化效果不佳,而一个广泛的基数会降低数据集的效用。 ●例如,年龄或门牌号等数值可以加入5为基数的随机数值,而人脸图像也可以打上随机噪声生成的马赛克。 |

4.2 软件如何实现?
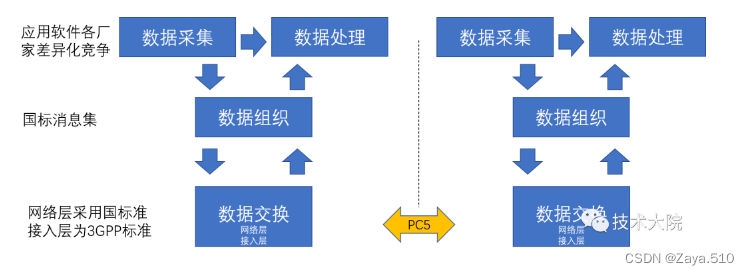
基于V2X的软件通用流程:
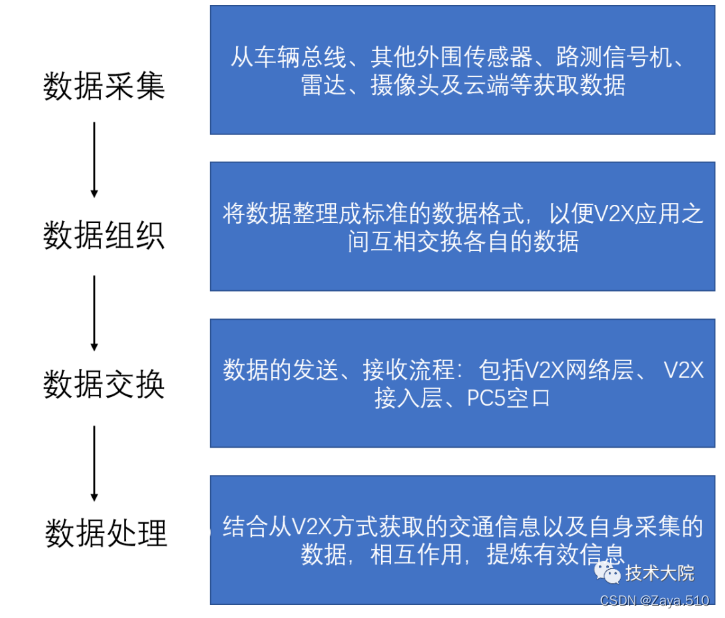
应用软件“栈”视图:
4.3 硬件如何实现?
由车端TBOX融合4G/5G通讯模组、C-V2X模组、SOC、MCU等
4.3.1各硬件作用(以应用在TBOX中的硬件为例)
| 通讯模组 | 完成无线数据、V2X数据收发,如华为MH5000,是5G+V2X模组 |
| SOC | 为主要的AP单元,通常集成V2X、以太网协议栈,做业务逻辑运算 |
| MCU | 负责网络、电源管理等与车辆强相关业务 |
| HSM | 安全芯片,提供安全启动和安全算法,对V2X消息签名密钥存储等 |
| eMCP | 由EMMC+LPDDR组合的存储器 |
| EMMC | 嵌入式设备存储器 |
| CAN | 与车辆总线相连,获取车辆行驶里程、定位信息、报警信息、行驶状态、SOC等数据 |
| USB | 为车载大屏供网,以及在Linux环境下进行系统升级 |
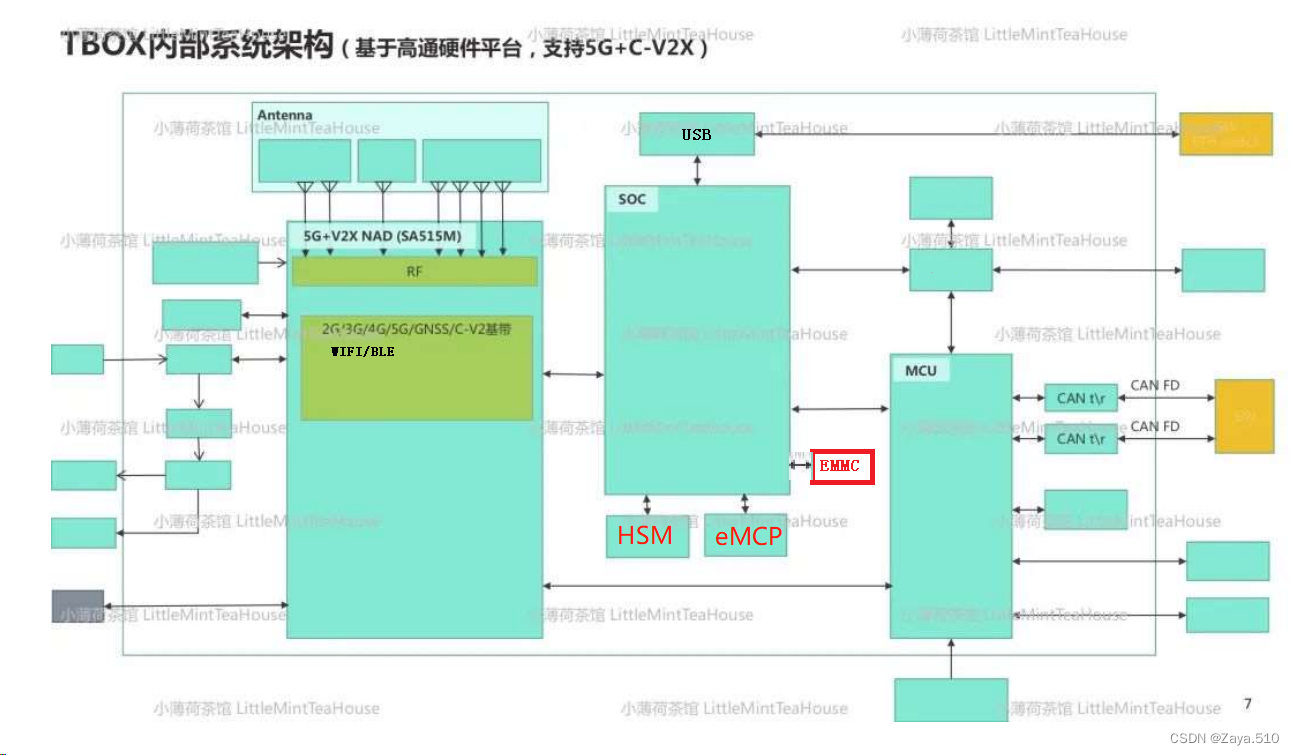
上图只是示意,实际硬件架构需要根据项目进行调整
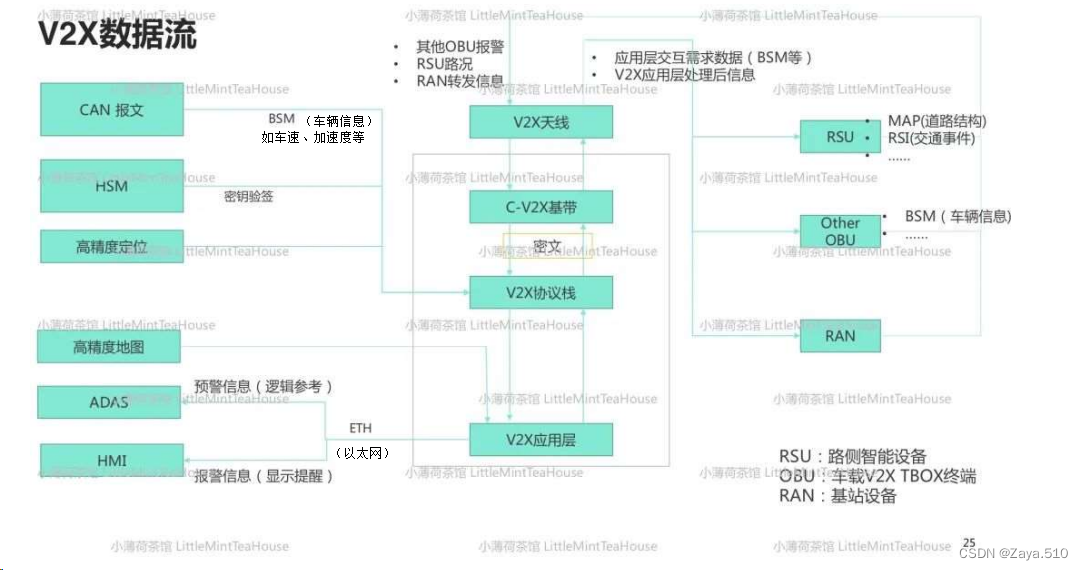
4.3.2 V2X数据流过程如下:
5、应用场景
5.1 通信场景说明
| 简称 | 名称 | 应用场景 |
| V2V | 车与车通信 Vehicle-to-Vehicle | ●通过车辆终端TBOX进行车之间的直连通信 ●车载终端可以获取800米以上范围内的其他车辆的车速、位置、方向和事件的异常情况,通过改善对障碍物和交叉路口的感知,帮助车辆避免事故等 ●车辆间可以D2D(端对端)通信 |
| V2I | 车与基础设施通信 Vehicle-to-Infrastructure | ●TBOX和路侧的交通设施((如红绿灯、路侧传感器(雷达、摄像头等))直连通信,实现数据交换 ●路侧基础设施也可以获取附近区域车辆的信息并发布各种实时信息 ●V2I通信主要用于实时信息服务、车辆监控管理、不停车收费、道路状况警告(如施工、拥堵)等 |
| V2P | 车与行人通信 vehicle-to-pedestrian | ●TBOX与弱势交通群体(行人、自行车、电动自行车等)使用的(手机、平板电脑等)进行直连通信 ●V2P使得行人和骑车人通过智能手机成为V2X通信环境中的一个节点 ●可以发送或接收警示信号,例如可以预先告知联网信号灯自身是否需要延长过马路的时间,也可以提示附近车辆前方路口有行人要过马路,或者提示车辆相邻车道有自行车在骑行,让车辆提前避让行人,应对“鬼探头”等场景 |
| V2N | 车与网络通信 Vehicle-to-Network | ●指TBOX通过接入网与云平台连接 ●云平台与车辆之间进行数据交互,并对获取的数据进行存储和处理,提供车辆所需要的各种应用服务 ●V2N通信主要用于车辆导航、车辆远程监控、紧急救援、信息娱乐等服务(现在OEM都已经实现) |
5.2 C-V2X应用场景列表
分为4张列表:中国C-V2X第一阶段、中国C-V2X第二阶段、中国基于车路协同的高等级自动驾驶典型应用、欧洲 C-V2X应用场景
①中国C-V2X第一阶段应用场景,简称DAY1(来源T/CSAE 53-2020)中国汽车工程学会标准信息平台 (sae-china.org)
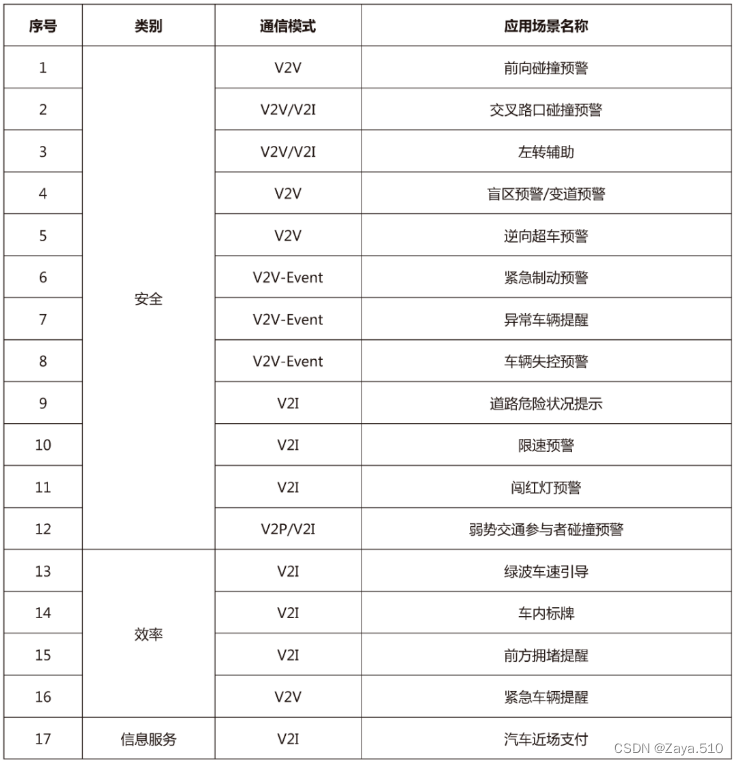
②中国C-V2X第二阶段应用场景,简称DAY2(来源T/CSAE 157-2020)

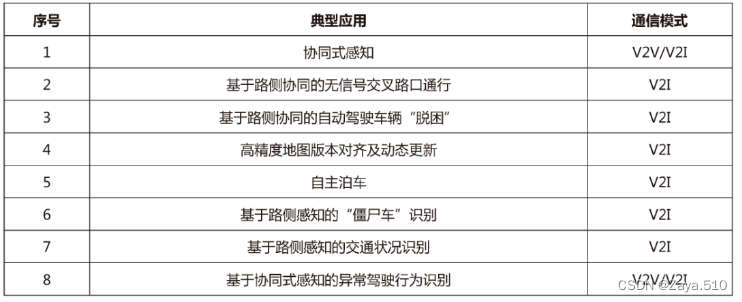
③中国基于车路协同的高等级自动驾驶典型应用(来源T/CSAE 158-2020)
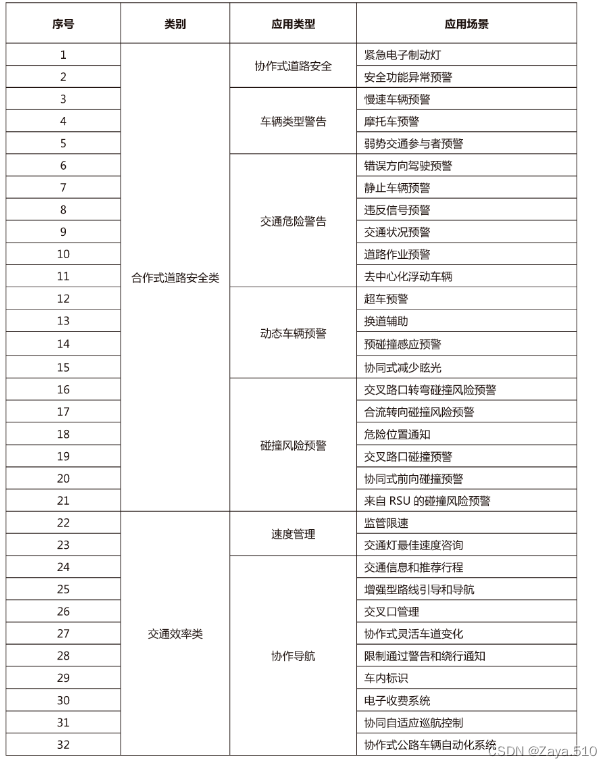
④欧洲 C-V2X应用场景(来源ETSI TS 102 638)
二、AM/FM收音机天线
1、天线介绍
1.1 概念
AM(Amplitude Modulation)是振幅调制,FM(Frequency Modulation)是频率调制;
AM和FM都是广播无线电信号的方式,以电磁波的形式传输信息
AM通过根据发送的信息调制(改变)发送的信号或载波的幅度来工作,而频率保持恒定
FM通过改变波的频率来编码信息(声音),并且振幅保持恒定。
1.2 AM和FM的对比
| 频率 | 调制方式 | 音质 | 特性 | |
| AM | 535~1705kHz | 振幅调制 | 差 | 易受噪声影响 |
| FM | 88~108MHz | 频率调制 | 好 | 不易受到噪声影响 |
2、工作原理
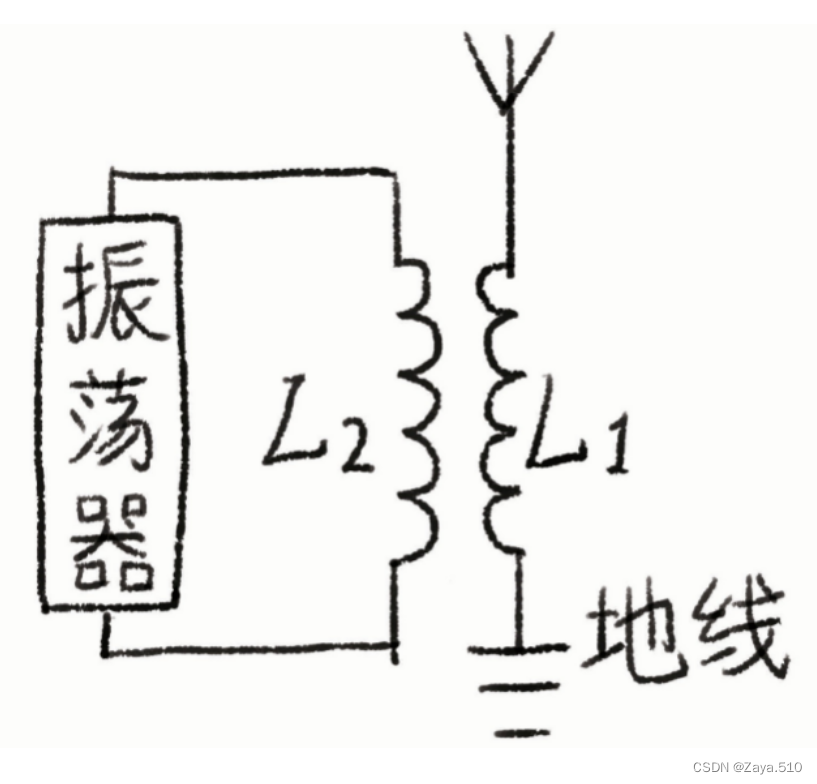
(1)将调制好的信号发射出去:通过AM或FM将低频信号调制为高频信号(高频信号的频率随着低频信号变化,这个过程就称为调频或者FM;如果让高频信号的振幅随着低频信号变化,这个过程就称为调幅或者AM),经过一个电容和一个电感构成的电路称为 LC 回路,在 LC 回路中会产生振荡的电磁场,向外发射电磁波,电路中的电容越小,发射的无线电频率越高,于是为了发射高频信号,我们把电容的两个板子面积减小。同时,为了让电磁波发射的范围足够大,我们可以把电容器的两个极板一个放置在顶端,一个放置在底端,这就构成了天线。
把调制好的电流信号通过电磁感应加载到天线上,天线就可以帮我们把无线电发射出去。
(2)接收无线电波:收音机上也有天线,天线是导体,无线电信号遇到导体就会在导体上激发起同样规律的感应电流,只是这个电流比较微弱。不过,接收天线也是 LC 回路,它也存在固有频率,如果接收天线的频率与空间中的无线电频率相同,就会产生电磁共振,此时天线上的感应电流最大。
比如,我们想收听 FM96.6,就把接受装置的固有频率调整到 96.6MHz,此时电路中受到经济之声引起的感应电流最大,而其他电台信号虽然也在电路中有感应电流,但是由于没有共振,所以电流很小。调整接收装置固有频率的过程其实是调整收音机中的电容大小,这个过程称为调谐,也就是我们生活中所说的搜台或者换台。
(3)信号解调:当我们接收到 FM96.6MHz 的经济之声频道之后,不能直接把电流通向喇叭,因为我们接收的信号是经过调制的高频信号,我们需要把低频信号从高频信号中检出来,这个过程称为解调。
我们按照与调制相反的方法,把高频信号过滤掉,余下低频信号。再把这个信号经过放大,通入喇叭。喇叭中的线圈在磁铁对电流作用力下前后振动,带动发声的膜片,我们就可以接收到广播中播放的优美的歌声啦!
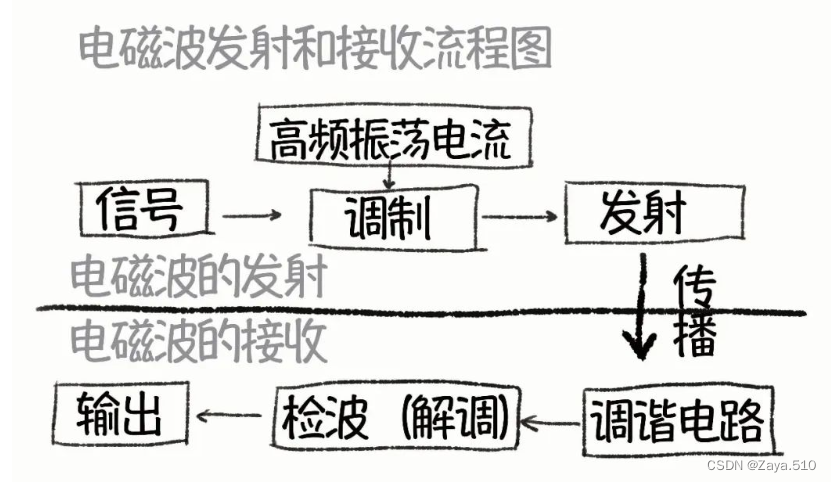
总的来说,广播的过程就是:信号经过调制变为高频信号,通过天线发射出去,经过各种方式到达接收端,经过调谐被接收装置接收,再经过解调就变为了原来的信号
三、4G、5G
1、介绍
(1)先讲讲2G、3G、4G、5G的概念
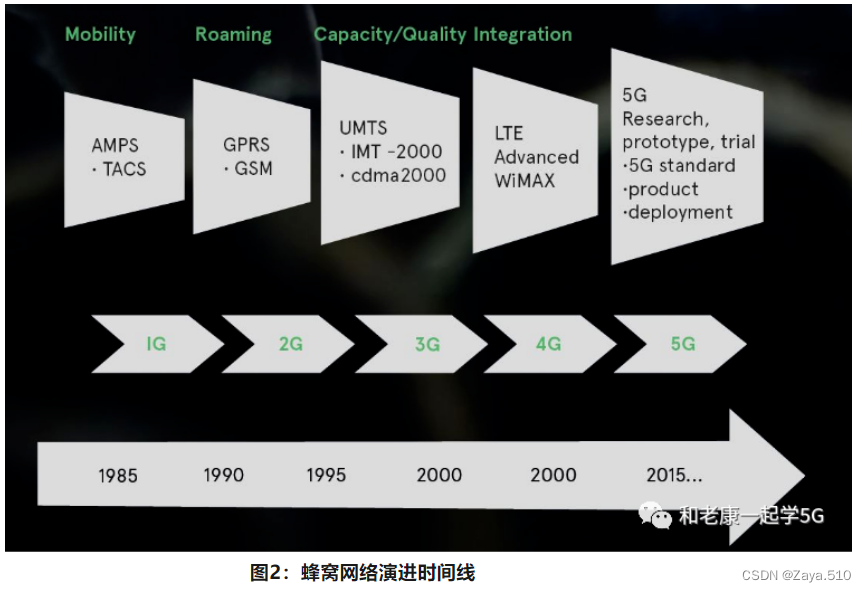
| 1G | ●高级移动电话系统 (AMPS)采用模拟技术,使用频分多址(FDMA)调制方式,1G 网络提供30KHz的信道容量和2.4kbps的速度 ●1G网络只允许进行语音通话,存在可靠性和信号干扰问题,并且对黑客的保护有限 |
| 2G | ●移动电话使用的第二代数字蜂窝网络,旨在取代采用模拟技术的第一代无线通信网络(1G)。 ●基于数字信号技术,全球移动通信系统(GSM)提高了安全性和容量,2G网络提供 30KHz到200KHz的带宽,并允许用户发送SMS和MMS消息,尽管速度较低,但最高可达64kbps ●GSM技术不断改进,后来引入了所谓的2.5G,它结合了GPRS形式的分组交换和EDGE 技术。2.5G支持高达144kbps的数据速率,使用户能够发送和接收电子邮件以及浏览网页 |
| 3G | ●国际电信联盟(ITU)制定的国际移动通信-2000(IMT-2000)标准所需要的第三代无线移动通信技术,要求支持至少 200 kbps 的峰值速率。 ●除了支持语音电话之外,还支持文本和图像消息。 ●它在欧洲采用UMTS,在美国使用CDMA2000技术 |
| 4G | ●3G 之后的第四代移动通信技术。一种移动宽带标准,能够支持包括电话、视频、数据和网页浏览在内的所有互联网协议(IP)网络。 ●4G 的性能目标是为汽车等高速移动应用提供 100 Mbps 数据速率,为包括行人和固定位置接入在内的低速移动应用提供 1 Gbps 数据速率。 ●4G是第一代使用长期演进(LTE)技术来提供介于100Mbps和1Gbps之间的下载速度,为最终用户提供更好的延迟(更少的缓冲)、语音质量的改进、即时消息服务和社交媒体、高质量的流媒体和更快的下载速度 ●4G也是第一个基于IP的移动网络,将语音作为另一种服务处理,并且正在开发该技术以适应包括无线宽带接入、多媒体消息服务(MMS)、视频聊天、移动电视、高清电视内容、数字视频广播(DVB) |
| 5G | ●5G是即4G(LTE-A、WiMax)、3G(UMTS、CDMA)和2G(GSM)系统之后的延伸。其性能目标是高数据速率、减少延迟、节省能源、降低成本、提高系统容量和大规模设备连接。 ●ITU-R IMT-2020(5G)中提出了包含国际电联的5G规范(图3)。这一雄心勃勃的规范代表了4G性能的一步演化化,其旨在满足新兴应用的要求其中吞吐量高达10Gbps(比4G网络快100倍)旨在满足日益增长的带宽需求;1ms的延迟(4G时延30-50ms)将实现近乎实时的响应速度;每平方公里100万台设备的连接密度(比4G多100倍)支持越来越多的物联网设备和传感器。 ●5G规范提出后,国际电联ITU将5G技术规范的定义委托给全球标准机构第三代合作伙伴计划(3GPP)。3GPP根据在无线网络中部署新功能的顺序对规范进行优先级排序并将规范分组到版本中。5G规范已集成到3GPP R15版和R16版(图 4)中,R16 版在国际电联2020年截止日期前已经完成,以确保5G技术的运营商和制造商对其设计和投资充满信心。 ●3GPP在R15 版中定义了5G(NR)非独立技术 |
(2)其他缩略语
| AM 失真 | ●由通信系统中的信号幅度变化引起的不良失真 |
| PM 失真 | ●由通信系统中的信号相位偏差引起的不良失真 |
| AM/PM 失真 | ●通信系统中的不良失真,会导致信号质量下降。它通常是放大器的相位响应与输入信号的功率电平(或幅度)相互作用的结果 |
| 天线互易 | ●关于天线的一种理论,它指出在给定介质中,天线的发射特性与接收特性相同 |
| 回程 | ●负责在基带单元(BBU)和核心网之间传输通信数据的网络部分。 ●它将较小的边缘网络与核心网连接起来。 ●回程在早期蜂窝网络时代通常是专有的,但在 5G 时代正转向以太网。 |
| 基站网络仿真器 | ●用于在测试环境中仿真协议和网络流量的工具。它与用户设备(UE)仿真和信道仿真配合使用,可以组成端到端系统,用于大规模测试和测量 5G 网络性能 |
| 基带单元(BBU) | ●基站的一个组件。 ●它是具有无线通信和无线控制处理功能的设备。 ●基带单元将数据转换为数字信号,然后发送到射频拉远头(RRH),由 RRH 转换成模拟信号。在 C-RAN 体系结构中,基带单元与射频头通常安装在不同地点。 |
| 波束采集 | 发现并连接用户设备(UE)的过程。在 5G 中,随着高度定向天线阵列和波束赋形技术的部署,这个过程发生了很大变化 |
| 波束赋形 | 使每个天线元件发生相对相位和幅度变化的方法,目的是使发射光束成形并离散控制其方向。波束赋形需要通信信道反馈来实现对波束的实时控制 |
| 波束控制 | 用于聚焦辐射方向图的方向和形状的一组技术。 在无线通信中,波束控制通常利用由多个天线元件组成的阵列,使信号出现相对相位和幅度偏移,从而改变信号的方向和缩窄发射信号的宽度 |
| 集中式 RAN(C-RAN) | 一种无线接入网(RAN)体系结构,它将基带功能与天线和远程射频头(RRH)分开,并将基带功能集中到中央基带单元(BBU)中。它是除移动边缘计算(MEC)之外的另一种体系结构 |
| 载波聚合 | LTE-Advanced 提供的一项主要功能,它使移动网络运营商能够将频段碎片中的多个载波组合起来,提高峰值用户数据速率和网络的总体容量。 |
| 蜂窝塔 | 安装电子通信设备的物理位置,包括网络中支持蜂窝通信的天线 |
| 信道仿真器 | 一种用于仿真无线电信号真实传播环境的工具。信道仿真器根据测试要求,使用数学模型仿真减损并应用到信号上。 |
| 协调多点(CoMP) | 多个基站可以使用这种技术协调下行链路传输(从基站(BS)到用户设备(UE))和上行链路传输(从 UE 到基站 BS),从而提高整体可靠性和性能。 |
| 控制面 | 这个网络部分能够传输信息来组建和控制网络。它可以控制网络接口间的用户信息包传输 |
| 核心网 | 通过无线接入网络(RAN)向移动用户提供服务的网络部分。它也是通往公共交换电话网或公共云等其他网络的网关。 |
| 循环前缀正交频分复用(CP-OFDM) | 一种正交频分复用(OFDM)技术,使用循环前缀(CP)取代零保护,保护正交频分复用信号免受码间干扰(ISI)。 |
| 通用公共无线接口(CPRI) | 一种接口规范标准,它定义了第 1 层和第 2 层接口。蜂窝塔上的无线设备(如射频头)通过这些接口连接到位于塔基或控制中心内的其他无线设备控制基础设施 |
| 数据面 | 这个网络部分负责传输用户数据包。图形和图解中经常使用它来直观地显示用户流量。它又称为用户面、转发面或载波面 |
| 离散傅立叶变换扩频正交频分复用 (DFT-s-OFDM) | 离散傅立叶变换(DFT)扩频(s)正交频分复用(OFDM)是 4G/5G 技术中采用的一种波形,它将循环前缀(CP)正交频分复用(OFDM)与降低的峰均功率比(PAPR)结合在一起 |
| 下行链路(DL) | 从基站到用户设备(UE)的传输路径。在 5G 标准中,下行链路(DL)采用正交频分复用(OFDM)波形 |
| 上行链路(UL) | 从用户设备(UE)到基站的传输路径。在 5G 中,上行链路使用 CP-OFDM 或 DFT-s-OFDM 波形 |
| 被测器件(DUT) | 被测器件(DUT)、被测设备(EUT)、被测系统(SUT)和被测单元(UUT)等术语都是指需要被测量的器件 |
| 增强型移动宽带(eMBB) | IMT-2020 愿景中定义的三个主要用例之一。增强型移动宽带是指与传统移动宽带(MBB)相比,能够达到更高的 5G 峰值和平均数据速率、容量以及更大的覆盖范围。增强型移动宽带(eMBB)规定,5G 设计能够在下行链路中达到 20 Gbps 的数据速率,在上行链路中达到 10 Gbps 的数据速率。 |
| eLTE eNB | 演进的 4G eNodeB(或 eNB),能够连接 4G 演进分组核心(EPC)和 5G 下一代核心网(NGC 或 NGCN) |
| 演进分组核心(EPC) | 3GPP 标准第 8 版中的一个标准化框架,用于支持在互联网协议服务体系结构 4G LTE 网络上融合的语音和数据业务。它以始终在线的连接为基础,使服务运营商能够为 2G/3G/LTE/WLAN 或固定接入(例如电缆或 DSL)部署一个分组网络。 |
| 演进节点 B(eNodeB/eNB) | 4G LTE 定义的蜂窝塔的一个组成部分,在基站中提供对用户设备(UE)的无线接入 |
| 演进分组系统(EPS) | 由基站和演进分组核心(EPC)组成的演进端到端体系结构,支持 4G 移动通信 |
| 演进的 UMTS 陆地无线接入网络(E-UTRAN) | 3GPP 联盟指定的一种新无线接口,于 2008 年在 LTE 中引入。它的设计目的是支持不断增长的数据传输速率,同时减少无线操作的时延 |
| 误差矢量幅度(EVM) | 误差矢量幅度是一种测量值,用于量化分析数字无线信号的质量。测量结果表示实际信号偏离其理想值的距离 |
| 频分双工(FDD) | 发射机和接收机使用两个不同的无线电频率进行工作,建立一个全双工的通信链路 |
| 全尺寸 MIMO(FD-MIMO) | MIMO 技术通过 LTE-Advanced Pro(第 13 版)添加到 3GPP 规范中。FD-MIMO 将 MIMO 概念扩展到三维:方位角(水平)、控制(距离)和仰角(垂直) |
| 前传 | 指 C-RAN 中连接蜂窝塔上的无线设备与集中化无线控制器(无线设备控制)的链路。前传数据通常经由光纤使用 CPRI(通用公共无线接口)标准进行传输。每个制造商都有专有的 CPRI 覆盖,只允许在链路两端使用该供应商的设备 |
| 固定无线接入(FWA) | 两个固定位置之间的一种无线宽带数据通信,通过无线接入点和设备实现连接。 |
| gNB 或 gNodeB | 下一代 NodeB — 基站在 5G 新空口(NR)中的变体。在 4G 中,它称为演进的 NodeB(eNB),在 3G 中称为 NodeB,在 2G 中称为基站收发信机(BTS)。5G NR 所定义的这个蜂窝塔部分在基站中使用,为用户设备(UE)提供无线接入 |
| 半双工(HD) | 用于交换语音或数据的双方通信系统,一次只能有一个节点发送语音或数据 |
| 谐波 | 某个信号的频率是另一个参考信号的整数倍。相应的谐波信号可以称为 2f 或 3f 等,其中 f 是参考信号的频率。 |
| 归属用户服务器(HSS) | 存储用户信息的公共数据库,其中保存有身份验证信息和许可(例如身份验证、授权和计费(AAA)服务器) |
| IMT - 2020 | 国际电信联盟(ITU)的无线通信部门于 2012 年定义的一个术语,它制定了“2020 年及之后的国际移动通信(IMT)”愿景。ITU 要求该标准于 2020 年制定完成。 |
| 国际移动设备身份(IMEI) | 一种唯一表明 3GPP 移动设备身份的编号。电信网络根据 IMEI 识别丢失或被盗的有效设备。 |
| 国际移动用户身份(IMSI) | 一种特殊的号码,用于识别用户设备中的用户识别模块(SIM)卡。 |
| 码间干扰(ISI) | 一个或多个符号干扰其他符号时所引起的信号失真。多径传播或非线性频率响应会导致信道中的幅度和相位色散,从而产生码间干扰 |
| 国际电信联盟(ITU) | 联合国设立的一个机构,负责协调全球无线频谱共用,在分配卫星轨道方面促进国际合作,致力改善发展中国家和地区的电信基础设施,以及协助制定和协调全球技术标准。 |
| 视距通信(LoS) | 指系统中的发射机和接收机处于彼此视距之内,无障碍地相互通信。例如,AM/FM 无线电广播、卫星传输和警用雷达都属于视距通信。 |
| 长期演进(LTE) | 一种高速无线通信标准,具有全 IP 网络体系结构,下载速率接近 300 Mbps,上传速率为 75 Mbps。它是3G 之后的下一代网络。 |
| 长期演进升级版(LTE-Avanced) | LTE-A 又称为“LTE 第 10 版”,是ITU正式指定为第一种 4G 技术的两个移动通信平台之一(另一个是 LTE-Advanced Pro)。它规定最大上传速度为 500 Mbps,最大下载速度为 1 Gbps,(往返)时延为 5 ms。 |
| LTE-Advanced Pro | 也称为 4.5G、4.5G Pro、4.9G、pre-5G,其特征功能在 3GPP 第 13 版和第 14 版中定义。它是长期演进(LTE)标准的进一步演进,速度高达 1 Gbps。LTE-Advanced Pro 包含了许多新功能和新技术,例如 256 QAM、FD-MIMO、LTE-Unlicensed、LTE IoT 等,使现有网络向 5G 标准演进。 |
| 长期演进授权辅助接入(LTE-LAA) | 3GPP 第 13 版的一部分,也是 LTE Advanced Pro 的一个特性。它使用免许可频谱(5 GHz)和许可频谱中的频段进行载波聚合,可以提高峰值用户数据速率和网络总体容量。 |
| 多路输入多路输出(MIMO) | 一种同时在发送端和接收端使用多个天线的天线分集技术,利用多径传播的优势提高无线通信的质量和可靠性 |
| 大规模 MIMO | MIMO 的扩展,使用更多的发射天线和接收天线来增加传输增益和频谱效率。目前对最小规模还没有定义,但通常认为大规模 MIMO 应拥有超过 8 个发射天线和超过 8 个接收天线。 |
| 移动边缘计算(MEC) | 一种网络体系结构,其中越靠近移动网络的边缘,数据处理能力越强(尤其是对时延敏感型应用更是如此 )。它是集中式 RAN (C-RAN)的竞争体系结构。 |
| MIPI | 超过 45 种标准移动行业处理器接口(MIPI)规范的集合,用于加速开发移动和移动相关的产品,这些产品最常用于移动手持设备。 |
| 大规模机器型通信(mMTC) | 大规模机器型通信是 IMT-2020 愿景中定义的三个主要 5G 用例之一,支持有数十亿设备和传感器连网的 5G IoT 用例。该用例的特点是带宽窄、数据猝发不频繁、需要长期的电池寿命。 |
| 多用户多路输入多路输出(MU-MIMO) | 多路输入多路输出(MIMO)技术的一种应用,其中基站同时与两个或更多个用户设备(UE)通信。 |
| NGC/NGCN | 5G下一代核心网。NGC 或 NGCN 是通过无线接入网(RAN)为移动用户提供服务的网络部分。它也是通往其他网络的网关,例如公共交换电话网或公共云。 |
| 非视距通信(NLOS) | 被障碍物遮挡的射频信号路径。非视距通信的障碍物通常包括建筑物、树木、丘陵和山脉 |
| 非独立 NR | 一种 5G 网络部署,它使用现有的 4G LTE 无线和演进分组核心网控制面,但也允许运营商使用 5G UE 和 5G 数据(或用户)面启动早期试验。 |
| 新空口(NR) | “5G NR”的简写。5G NR 是基于 OFDM 的新空中接口标准,支持 5G 设备、业务、部署和频谱。新空口(NR)描述 5G 的方式与 LTE 描述 4G 一样。3GPP 列出了 5G NR 的三个重点领域:增强型移动宽带(eMBB)、大规模机器类通信(mMTC)和超高可靠性低时延通信(URLLC)。 |
| 参数集 | 参见如何基于底层结构创建蜂窝通信波形。5G NR 规范允许使用灵活的参数集,这意味着 OFDM 帧的子载波间隔和符号时序均可变,并且可以灵活使用符号时隙。5G NR 允许在同一个载波频率上发送不同的参数集。 |
| 正交频分复用(OFDM) | 一种频分复用方案,它在多个频率信道上编码数字数据,以便增加带宽并减少响应时间。OFDM 技术支持密集分组的子载波,不需要保护带和过滤器,因此可以提高频谱效率和简化电子设计。OFDM 特别适合在受窄带干扰的恶劣信道条件下使用 |
| 空中(OTA) | 与有线连接不同,它通过空中接口测试射频性能、解调或 RMM (无线资源管理);通常在消声室中执行测试 |
| 分组数据网络网关(PGW) | 4G LTE 演进分组核心中的设备,它将 LTE 网络连接到其他分组数据网络 |
| 相控阵天线 | 相控阵天线可以产生窄波束,在无需机械运动的情况下将其动态指向预期方向。预计它将成为 5G 基站和用户设备(UE)使用的主要毫米波天线。相控阵天线由一组较小的天线单元组成,比如单个贴片或偶极。通过改变输入到各个单元的信号的相对相位和幅度,天线阵列可以在选定方向上形成和控制一个波束 |
| 皮蜂窝 | 一种小型蜂窝基站,可替代中继器或分布式天线系统,有助于改善移动电话在室内的接收信号强度 |
| 正交幅度调制(QAM) | 一种包含数字和模拟组件的调制方案。QAM 通过将两个幅度调制波形合并到单个载波上,可以将有效带宽加倍。 |
| 体验质量(QoE) | 这种方法使用各种成功要素(包括易用性、可靠性、安全性和成本)来衡量客户对网络的总体满意度。 |
| 服务质量(QoS) | 这种方法衡量网络实现特定性能阈值(时延、误码率和正常运行时间)的能力。 |
| 无线接入网(RAN) | 电信网络的一个组成部分,通过无线连接将用户设备连接到移动网络的其他部分。将用户设备连接到核心网 |
| 无线接入技术(RAT) | 适用于无线通信网络的基础物理连接方法。现代手机可以在一个设备中支持多种无线接入技术(RAT),例如蓝牙、Wi-Fi、 NFC(近场通信)以及 3G、4G 或 LTE 和 5G。 |
| 远程射频头(RRH) | 基站中的一个元器件,负责将数字信号转换为模拟信号以进行传输。远程射频头通常安装在蜂窝塔上靠近天线的位置,以便最大限度地减少信号损耗。 |
| 无线资源管理(RRM) | 管理无线资源和传输特性,例如调制方案、发射功率、波束赋形、用户分配、数据速率、切换标准和错误编码方案 |
| 软件定义网络(SDN) | 一种使用开放协议远程配置网络交换机和路由器的方法 |
| 独立新空口(Standalone NR) | 一种 5G 网络部署配置,其中 gNB 不需要任何 4G 协助即可连接到核心网;5G UE 连接到 5G 下一代核心网(NGC或 NGCN) |
| 单用户多路输入多路输出(SU-MIMO) | 多路输入多路输出(MIMO)技术在无线通信中的一种应用,基站在分配的时间段内仅与一个 UE 通信 |
| 时分双工(TDD) | 这种双工通信方式在同一个频带中使用不同时隙将上行链路与下行链路分开 |
| 发射分集 | 这种技术通过从两个或多个独立源发送相同信息来减少信号衰落 |
| 传输时间间隔(TTI) | 移动网络中传输一个帧所用的时间。与 IP 网络一样,基于流量类型、差异化服务等级等独特要求,5G NR 允许有不同的传输持续时间 |
| 用户设备(UE) | 用户的移动设备,例如手机、平板电脑或调制解调器 |
| UE 仿真 | 仿真用户设备(UE)的使用特征。 |
| 用户面功能(UPF) | 5G 网络的一种功能,相当于 4G LTE 网络中的分组网关。用户面功能包括多种功能特性,支持数据包路由和转发、与其他数据网络的互连,以及策略实施。它也称为数据面。 |
| 超高可靠性低时延通信(uRLLC) | 5G NR 中定义的三个关键用例之一。uRLLC 的重点是要求无故障和实时通信的应用。例如远程手术、工业互联网、智能电网、基础设施保护、智能交通系统和自动驾驶汽车。 |
| 虚拟 EPC(vEPC) | LTE 系统中的核心网,它是由支持 SDN 的白盒交换机和虚拟网络功能所构建,而不使用专用硬件。 |
| Xn 接口 | 连接 RAN 节点的逻辑接口。即它将 gNB 连接到 gNB,将eLTE eNB 连接到 gNB,反之亦然。 |
2、工作原理
2.1 5G RAN原理
(1)概念
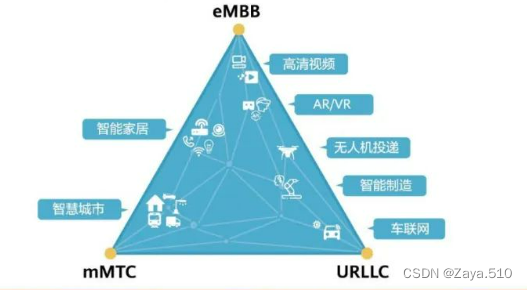
5G主要围绕URLLC、eMBB和mMTC三个场景展开,通过技术演进提升用户体验
(2)5G 组网
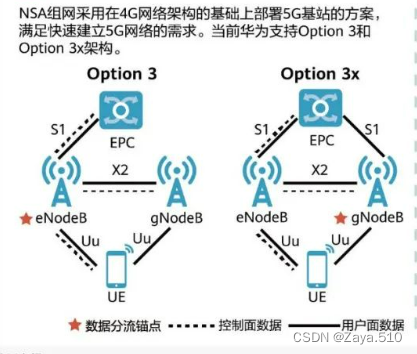
5G组网分为NSA(Non-Standalone,非独立网)和SA(Standalone,独立网),独立与非独立在于是否利用4G技术设施进行部署,SA组网模式需要新建全套5G基础设施,而NSA组网会使用部分4G基础设施
| NSA | ●采用在4G网络架构基础上部署5G基站的方案,当前华为支持option3、option7和option3x架构
●NSA组网目前主要流行的是Option3X和Option7两种方案,Option3X和Option7都是以4G基站eNodeB作为控制锚点,即eNodeB传输UE和核心网间的控制信令,而在NSA模式下,5G基站gNB不传输UE和核心网间的控制信令(4G基站和5G基站都需要传输用户面数据) ●两种方案的区别在于:Option3基于4G EPC(Evolved Packet Core,分组核心网)部署,而Option7基于5GC(5G Core,5G核心网)部署。在5G核心网没有部署的情况下,通常NSA指的是Option3X。 |
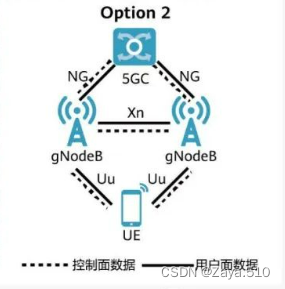
| SA | ●采用端到端的5G网络架构,5G基站直接与5G核心网连接,做到独立部署,当前华为支持option2架构
●即独立的5G基站gNB,和独立的5G核心网5GC,支持eMBB,mMTC,uRLLC场景,便于拓展垂直行业。网络简单,但全新建周期 |
(3)5G频谱
5G频谱划分为FR1(410MHz~7125MHz)和FR2(24250MHz~52600MHz),FR1是5G的主用频段,FR2是5G的扩展频段
(4)5G技术演进

(5)5G NR新空口关键技术
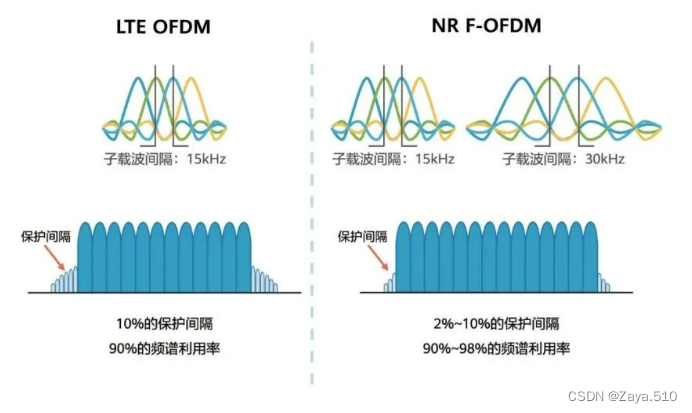
①F-OFDM(基于滤波的正交频分复用),是一种提升频谱利用率的技术,通过滤波器的优化设计,减少系统带宽内的保护间隔,相比LTE OFDM系统,可使用的有效频谱更多,系统性能更好
②时隙配比
上下行时隙配比,不同时隙配比类型对应的上下行时隙数量不同,可以通过选择不同的时隙配比满足上下行容量配比要求

③信道编码
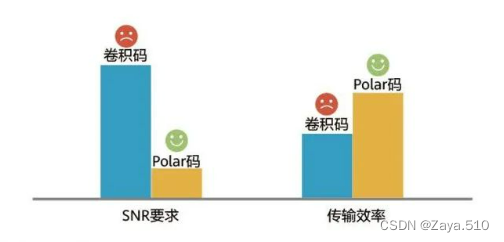
控制信道编码-polar码,eMBB场景下,NR的控制信道采用polar码,与LTE控制信道使用的卷积码相比,相同条件下,polar码的SNR要求比卷积码更低,且传输效率提升了10~30%
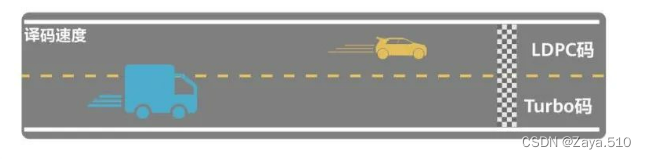
数据信道编码-LDPC码,eMBB场景下,NR的数据信道采用LDPC码,在高速率场景,LDPC码的译码速度比LTE的turbo码译码速度更快
④massive MIMO,通过提升收发通道数量,可以获得阵列、分集、波束赋形和空分复用四个方面增益,提升系统覆盖、系统容量和峰值速率
详细内容参看:超全轻松理解5G技术原理
五、WiFi天线
1、介绍
1.1 WiFi发展

1.2 WiFi介绍
WLAN是无线局域网络的简称,全称为Wireless Local Area Networks,是一种利用无线技术进行数据传输的系统,该技术的出现能够弥补有线局域网络之不足,以达到网络延伸之目的。
WiFi是无线保真的缩写,英文全称为Wireless Fidelity,在无线局域网的范畴是指“无线兼容性认证”,实质上是一种商业认证,同时也是一种无线联网技术,与蓝牙技术一样,同属于在办公室和家庭中使用的短距离无线技术。
1.3 WiFi组成
由无线网卡+1台AP
| AP | ●Access Point,"无线访问接入点",或“桥接器,工作原理相当于一个内置无线发射器的集线器或路由 ●作用:主要在媒体存取控制层MAC中扮演无线工作站及有线局域网络的桥梁 |
| 无线网卡 | ●负责接收由AP所发射的信号的客户端设备 |
1.4 WiFi特点
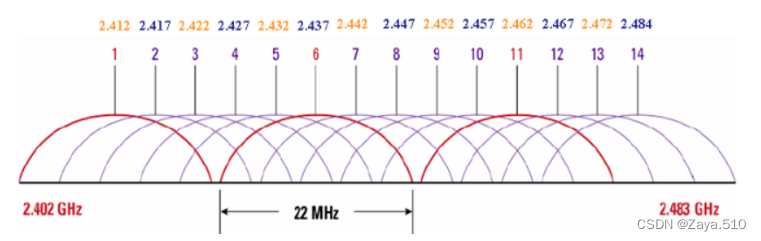
| 工作频率 | ●2.4G频段,频率范围为2.400—2.4835GHz,共83.5M带宽 |
| 信道 | ●14个,5MHz/相邻信道间隔 ●每个子信道宽度为22MHz
|
| 重叠 | ●相邻的多个信道存在频率重叠(如1信道与2、3、4、5信道有频率重叠) |
| 干扰 | ●整个频段内只有3个(1、6、11)互不干扰信道 |
1.5 WiFi最新技术
WiFi 7,第七代WiFi无线网络,速度可高达每秒30Gbps,是WiFi 6最高9.6Gbps速率的三倍之多。相比于WiFi 6,WiFi 7将引入CMU-MIMO技术最多可支持16条数据流,WiFi 7除传统的2.4GHz和5GHz两个频段,还将新增支持6GHz频段,并且三个频段能同时工作。
| WiFi4 | WiFi5 | WiFi6 | WiFi6E | WiFi7 | |
| 发布时间 | 2007 | 2013 | 2019 | 2021 | 2024 |
| 标准 | 802.11n | 802.11ac | 802.11ax | 802.11be | |
| 最大吞吐量 | 1.2G/bps | 3.5G/bps | 9.6G/bps | 30G/bps | |
| 频段/Hz | 2.4G、5G | 5G | 2.4G、5G | 2.4G、5G、6G | 2.4G、5G、6G |
| 加密方式 | WPA2 | WPA2 | WPA3 | WPA3 | |
| 信道宽度 | 40MHz | 80MHz | 160MHz | 320MHz | |
| 调制模式 | 64-QAM OFDM | 256-QAM OFDM | 1024-QAM OFDMA | 4096-QAM OFDMA增强 | |
| MIMO | 4*4MIMO (4条数据流) | 4*4DL MU-MIMO (4条数据流) | 8*8DL/UL MU-MIMO (8条数据流) | 16*16 CMU-MIMO (16条数据流) | |
| 延时 | / | 30ms | 20ms | <5ms | |
| 多连接 | 不支持(如一个手机同时间只能连一个路由器) | Multi-Link(如一个手机同时 间可以连多个路由器) | |||
QAM:是正交调幅,每个星座点都混合了载波的振幅和相位变化
①1024-QAM:每个星座点代表10bit数据
②4096-QAM:每个星座点代表12bit数据

2、实现方式
WiFi模块+WiFi天线:W58+A5839(仅为示例)
| W58 | ●基于高通QCA-9377-3芯片组的小型低功耗、低成本Wi-Fi和BT模块 ●该模块可用于汽车网络、无线路由和其他无线终端 ●该模块符合 IEEE 标准 802.11b/g/n ●与基带、PA 和 2.4G RF 收发器集成,通过 SDIO3.0 接口支持 SIMCom LTE CAT-4 模块之间的数据通信(SIM7600x-H 系列模块) |
| A5839 | ●工作频率是2.4GHz ~ 2.5GHz ●支持蓝牙,Wi-Fi,Zigbee™通讯方式 |
六、蓝牙技术
1、天线介绍
1.1 蓝牙版本介绍(新版本会向下兼容老版本)
 | |
| 蓝牙5.3 | ●传输速率与蓝牙5.2相同 ●延迟更低、续航更长、抗干扰能力更强。 ●支持包含广播数据信息(ADI)的周期性广播,有效提高通信效率 ●新增LE增强版连接更新功能,轻松实现低功耗 ●新增LE频道分级功能,可减小设备间的相互干扰 ●新增Host设定Controller密钥长度的功能,安全性提高 ●彻底删除高速配置(HS)及相关技术规范 |
| 蓝牙5.2 | ●增加了增强型ATT协议,LE功耗控制和LE同步信道等功能 ●有效提高传输距离,增加通信范围 ●LE功率控制功能:根据信号强度变化来动态优化连接设备之间的传输功率,同时保证信号质量与减少功率浪费。 ●多主多从:主从一体角色下可同时连接7个从设备,并且可以作为从角色被另一个主角色设备连接。 |
| 蓝牙5.1 | ●AOA功能(Angle-of-Arrival到达角):可以实现厘米级定位,定位精度最高30cm,室内定位更加精准。 ●蓝牙AOA的定位频率最快可做到1秒10次,也就是定位终端每100ms需广播一次蓝牙数据 |
| 蓝牙5.0 | ●更先进的蓝牙芯片,支持左右声道独立接收音频,数据处理能力更强、延迟更低 ●无损传输:支持24bit/192KHz的无损音源传输,距离可达300m ●LE的扩展广播信道可以在0~39任意信道 |
| 蓝牙4.2 | ●通过6LoWPAN接入互联网,提升数据传输速率 ●传输速率提升,安全性加强 ●RSSI定位,定位精度2m |
| 蓝牙4.0 | ●将3种蓝牙(即传统蓝牙,高速蓝牙和低功耗蓝牙技术)合而为一 ●3种蓝牙既可以组合用也可单独用 ●蓝牙4.0之后版本属于低功耗蓝牙 ●功耗大,需要有稳定的供电设备,一般手机、PC都采用双模的蓝牙芯片 ●蓝牙连接仅需3ms完成 ●使用AES-128 CCM加密算法进行数据包加密认证,保证数据传输的安全性 ●logo:
●Smart Ready可以和Smart Ready、传统蓝牙,以及Smart之间相互连接和通信。
●应用方向:运动管理、医疗健康照护(血压计、血糖仪等)、智能仪表、智能家居(智能遥控器、机顶盒)以及物联网应用(蓝牙鼠标) |
| BLE | ●Bluetooth Low Energy,低功耗蓝牙 ●高可靠性,功耗低,一般使用电池或纽扣电池供电 ●仅适用3个广播通道(37,38,39),每次广播射频的开启时间约0.6~1.2ms,因此待机功耗小 ●使用深度睡眠状态来代替传统蓝牙的空闲状态,深度睡眠下,主机host长时间处于超低的负载循环duty cycle状态,只在需要运作时由控制器来启动 ●logo:
●Smart可以和Smart、Smart Ready之间连接和通信
|
| 传统蓝牙: ●蓝牙3.0及以下都为传统蓝牙 ●常采用16~32个频道进行广播,每次广播射频的开启时间约22.5ms,因此导致待机功耗大 ●蓝牙连接需6s完成 ●logo:
●传统蓝牙可以和Smart Ready、传统蓝牙之间连接和通信
| |
| 蓝牙3.0 | ●使用全新的协议,传输速率:24Mbps,传输速率在蓝牙2.0的基础上大大提升 ●支持视频传输 |
| 蓝牙2.1 | ●该版本蓝牙模块具备了手机间的配对和近场通讯NFC(Near Field CoMMunication)机制 ●Sniff Subrating功能:可以实现设定两个设备间的确认数据发送间隔,当我们延长这个时间间隔就可以让蓝牙芯片的功耗降低 ●该版本的蓝牙协议支持全双工通信模式,数据可实现实时双向交互 |
| 蓝牙2.0 | ●蓝牙2.0是1.2的优化提升版本,传输速率:2Mpbs左右 ●可以实现全双工的工作方式,可以在传输文件的同时传输语音信息,进行实时双向通信 ●功耗相对降低,开始支持立体声 ●提出的EDR(Enhanced Data Rate,增强数据速率) |
| 蓝牙1.2 | ●传输速率:748~810kpbs ●在蓝牙1.1版本的基础上 ,增加了抗干扰跳频功能,支持单通道播放,但是性能还是不理想 |
| 蓝牙1.1 | ●传输速率:748~810kpbs ●只能以单工的传输方式进行工作,容易受到同频率产品的通信干扰 |
| 蓝牙1.0 | ●传输速率:748~810kpbs ●单工传输,通信易受干扰 ●难以区分主副设备 ●提出的BR(Basic Rate,基础速率) |


1.2 蓝牙芯片
| 双模芯片 dual-mode | ●支持BR(basicrate,属于传统蓝牙技术)+BLE |
| 单模芯片 | ●指BLE或传统蓝牙 |
1.3 BLE
BLE是国际蓝牙联盟(BT-SIG)通过的一个标准蓝牙无线协议,该协议定义了GAP(Generic Access Profile)和GATT(Generic Attribute)两个基本配置文件
| GAP | 负责: ●设备访问模式和进程,包括设备发现、建立连接、终止连接、初始化安全特征和设备配置 |
| GATT | ●用于已连接蓝牙设备间的数据通信 |
2、工作原理
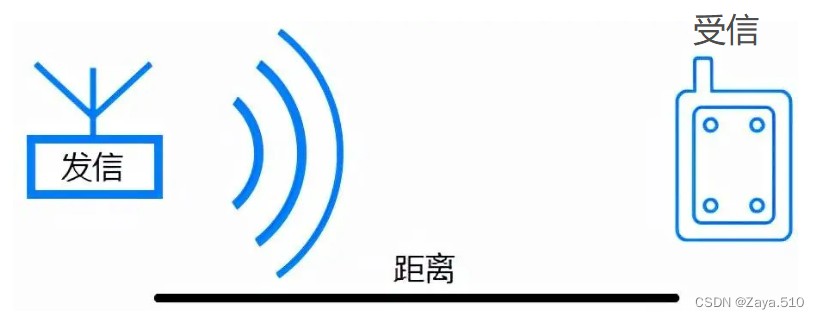
无线电波在传输过程中,随着传输距离的增加,信号会逐渐衰减。根据此特性,蓝牙定位方式是根据测试发信设备的信号强度,蓝牙受信设备估算与发信方的距离。根据定位的应用场景,主要分为两个应用方向,蓝牙感知技术和蓝牙定位技术
2.1 蓝牙感知技术
①相对简单,根据发信方的信号强度变化来判断发信方的位置,受信方接收到发信方的信号,对信号进行分析后,估算距离远近,在移动中,随着距离发生变化,信号强度发生变化,信号增强,则更接近发信方,反之,则远离发信方。
②应用场景:物品查找和兴趣热点这2种服务,因为需要自身移动的强度变化来判断距离,才能找到大约方向,体验感比较差,因此只能用于简单应用
| 物品查找 | ●针对个人应用 ●如寻找钱包、个人用品、钥匙 |
| 兴趣热点 | ●在大型公共场所,在特定的兴趣点搜索 ●如博物馆内,给展品绑上蓝牙设备,参观者可通过手机应用,根据展品发出的信号找到展位 |
2.2 蓝牙定位技术
分为实时追踪和室内定位这2个方向的应用,下面主要讲室内定位,该技术应用在汽车上
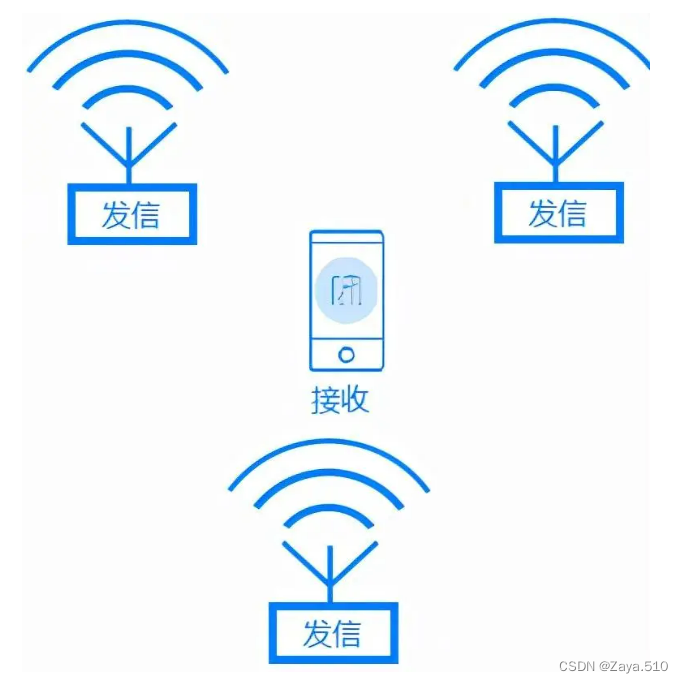
用户通过手机应用软件,接收来自固定发射器的信号,通过信号强度计算自己与固定发射器的距离。在平面上,通过至少三个固定发射器的信号强度,就能得出平面上的位置信息。
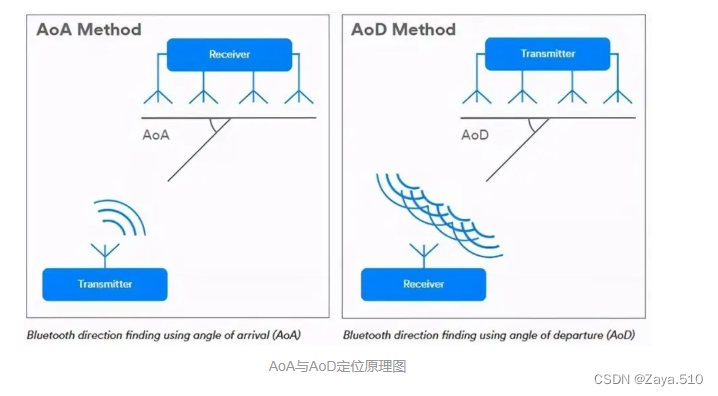
在蓝牙5.1中引入AoA和AoD这2种寻向功能,可实现厘米级定位,可达10~30cm的定位精度
2.2.1 AoA
①AOA(Angle-of-Arrival到达角)定位,是一种基于蓝牙信号到达角度的蓝牙定位算法。蓝牙AOA定位算法的优点是定位算法通信开销低,定位精度较高。
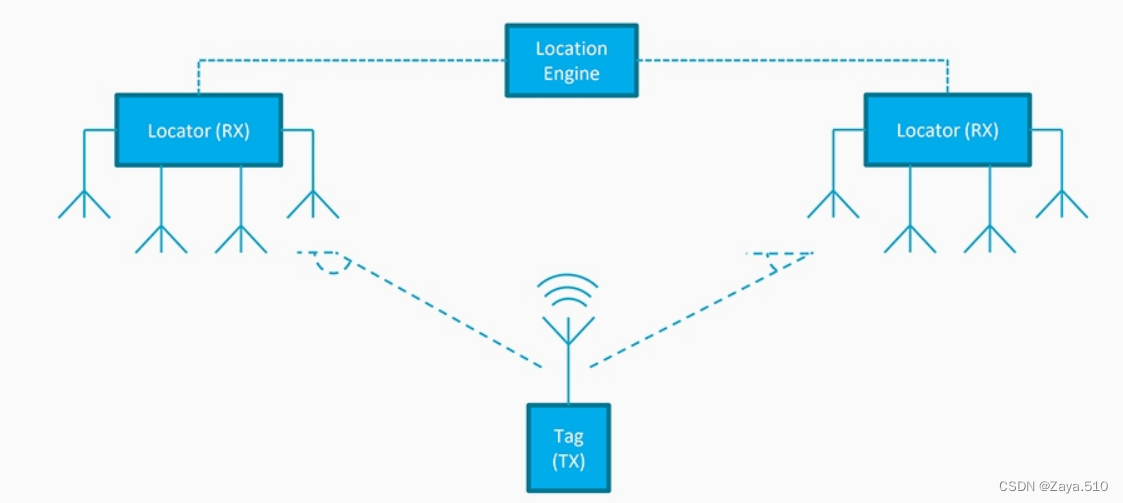
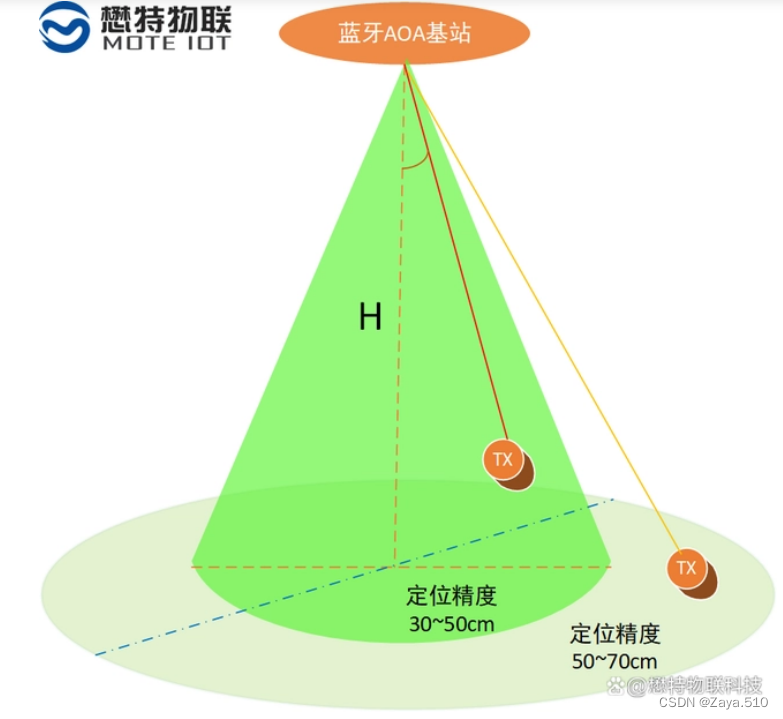
②是利用单一天线发射寻向讯号,而接收端的装置内建天线阵列,当信号通过时,会因阵列中接收到的不同距离,产生相位差异,进而计算接收节点(蓝牙AOA定位基站)和发射节点(蓝牙AOA标签)之间的相对方位和俯仰角度,然后再利用三角测量法或其他方法计算出其他节点(蓝牙AOA标签)的位置;AOA定位是一种高精度定位测向角技术,不只利用蓝牙可实现高精度定位,利用UWB、5G信号作为载波同样可以实现。

③接收节点的部署高度为H,一般而言:
| 发送节点距离<1.2H的接收节点 | 定位精度可达30~50cm |
| 1.2H<发送节点距离<1.5H | 定位精度可达50~70cm |
举例:蓝牙AOA定位基站的安装高度为3米,那么以蓝牙基站为圆心,3.6米的半径范围内,定位精度为30cm;覆盖半径在3.6米~4.5米范围内定位精度一般在50~70cm
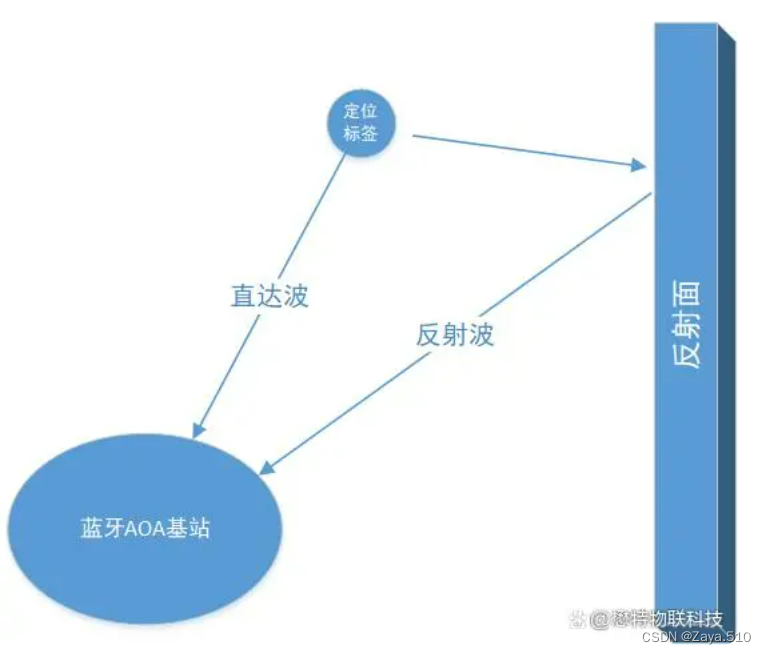
④蓝牙AOA采用到达角度定位算法,相较于蓝牙RSSI定位算法,不易受周围的环境干扰,AOA可以对RSSI形成一定的替代。但是在周围金属、玻璃较多的环境中,容易发生多径反射,导致定位出现偏差,一般定位精度在1m内。如下图所示:
2.2.1 AoD
还有一种测距定位方式AOD(Angle of Departure),是一种基于蓝牙信号出发角度的蓝牙定位算法;发射端由射频开关和天线阵列组成,通过发射测向广播包,在发射过程中切换天线,使其出发角(AoD)可被检测到,接收端使用单个天线来接收这些广播包,并在这些包中捕获IQ(In-Phase and Quadrature)样本,方向的确定基于单个发射端天线阵列中的不同天线发射无线电信号到接收机天线收到的广播延迟,IQ测量可以检测广播延迟。AoD相比于AoA,实现起来也相对复杂,目前主要的还是应用AoA方案来实现定位
2.2.3 RSSI定位
①received signal strength indicator,接收信号强度指示,通常以dBm为单位。
②RSSI数值多为负值,因为蓝牙芯片的最大发射功率通常只有几dBm,经过路径损失后,接收端设备的信号强度通常为负值。但RSSI不会低于芯片的接收灵敏度,因为低于接收灵敏度的信号无法被蓝牙芯片测量
③RSSI越大,距离越近,RSSI越小,距离越远,RSSI的定位精度通常仅为1-2米。这样的精度仅能将目标定位到一个区域范围内。如下图,至少3根天线获得的场强值来计算距离获得定位的一个点,理论上,天线数量越多,定位精度越精确。但由于蓝牙本身的特性,在远距离的时候,它的定位精度很难被大幅度提高,10米之后,场强变化不到10dB,很难精确定位。

④基于RSSI的定位系统分为主动式、被动式以及主被动一体式三种类型。
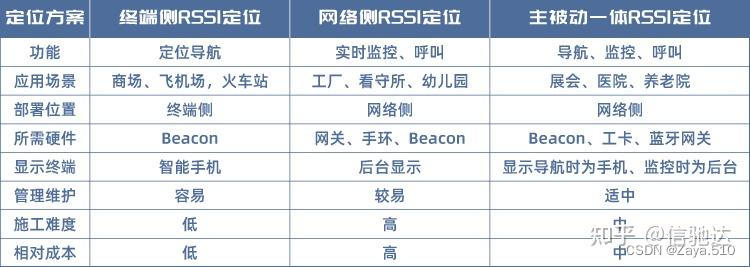
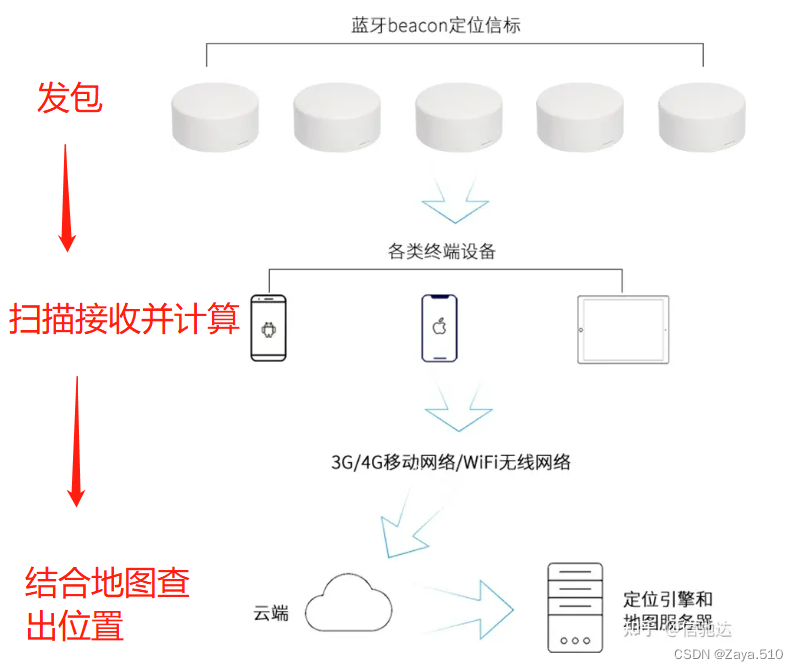
| 主动式 | ●又叫终端侧RSSI蓝牙定位系统,不需要联网,成本低 ●定位原理:通过RSSI值来确定蓝牙终端设备和蓝牙信标(Beacon)之间的相对位置,由信标发射信号,蓝牙终端设备接收,定位精度在米级(2-3米),可以实现路径规划、语音导航、反向寻车等功能 ●实现方式: ①在定位区域内部署蓝牙信标,一般至少3个信标,信标会每隔一定的时间广播数据包到周围 ②当终端设备(智能手机、平板等)进入信标广播覆盖范围,会扫描接收到信标广播出来的数据包(包含MAC、RSSI等信息) ③终端设备通过定位算法以及云端后台地图引擎数据库,即可在地图上标记出设备当前位
●应用场景:商超、景点、停车场定位导航(反向寻车)、医院、养老院、展会、机场、火车站、展馆博物馆等 |
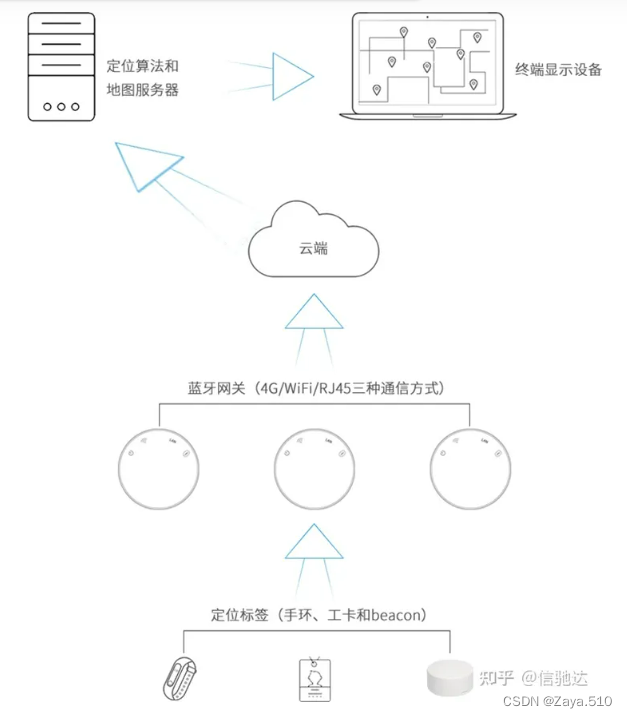
| 被动式 | ●又叫RSSI蓝牙探测定位系统或网络侧RSSI蓝牙定位系统 ●依托于基于RSSI的蓝牙定位引擎算法、蓝牙网关、蓝牙定位标签(手环、工卡、Beacon信标等),可实现2~3m左右的定位精度。 ●实现方式: ①蓝牙定位标签(手环、工卡、Beacon信标等)工作在信标广播状态,将自身的MAC地址、电量、RSSI、心率等信息进行广播 ②蓝牙网关(4G/Wi-Fi/RJ45三种通信方式)扫描到蓝牙定位标签的广播信息,将相关信息传输到中央定位引擎,中央定位引擎对有关信息进行计算,获取到蓝牙定位标签的位置信息 ③终端显示软件将蓝牙定位标签的位置信息进行显示,可以实现实时位置跟踪、轨迹回放、电子围栏、心率监测等功能
●应用场景:医院、养老院等 |
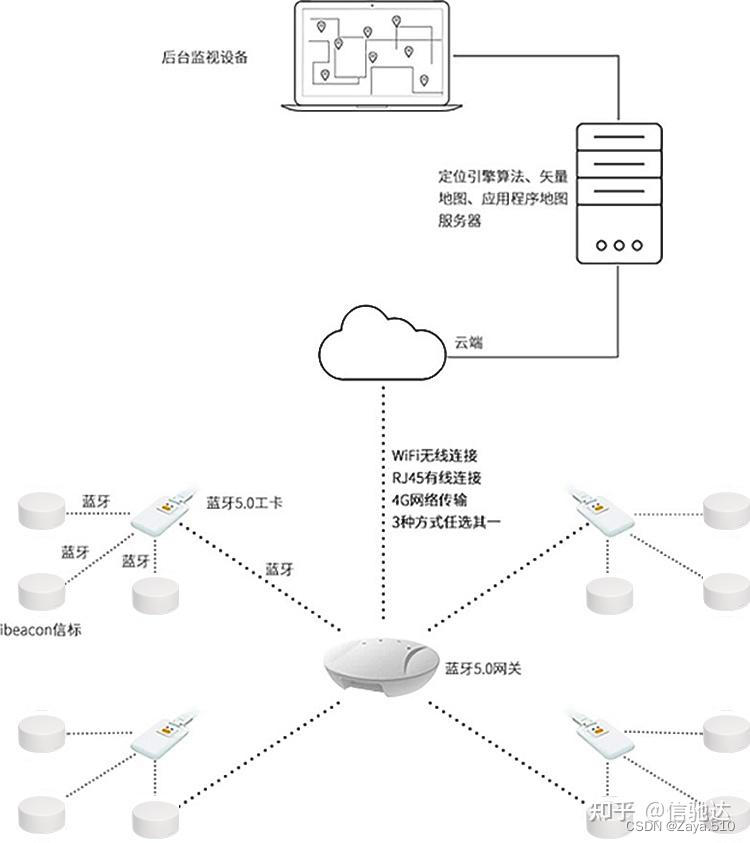
| 主被动一体 | ●集成前台用户自主定位导航和后台实时定位监测功能于一体的室内定位系统 ●系统主要由蓝牙定位引擎算法,蓝牙网关、蓝牙工卡和Beacon信标等一系列蓝牙定位硬件组成 ●可以最大限度减少蓝牙网关的使用,节省用户部署蓝牙网关的成本,是低成本室内定位系统较好的选择,可实现2-5米以内的定位 ●实现方式: ①Beacon信标工作在广播状态,将自身的MAC地址、电量等信息进行广播出去 ②蓝牙工卡扫描采集Beacon信标的广播信息,并将Beacon信标的广播信息通过蓝牙转发给蓝牙网关 ③蓝牙网关收集工卡的信息,将蓝牙工卡转发出来的Beacon信息通过Wi-Fi或者RJ45方式(二选一)发送给定位服务器 ④定位服务器根据蓝牙工卡和Beacon的信息,通过运行位置定位引擎算法,计算出蓝牙工卡的位置,终端显示软件将蓝牙工卡的位置信息进行显示,可以实现实时位置定位跟踪、轨迹回放、电子围栏等功能
●应用场景:广泛应用于博物馆、贵重资产定位管理、景点、医院、停车场定位导航(反向寻车)、养老院智慧养老、展馆、机场、火车站、访客人员定位管理等室内定位场景 |
3、相关参数
| 工作频率 | ●BLE:2.4GHz |
| 传输距离 | ●<10m |
| 典型应用 | ●设备间小量数据传输 |
| 定位精度 | 1~3m |
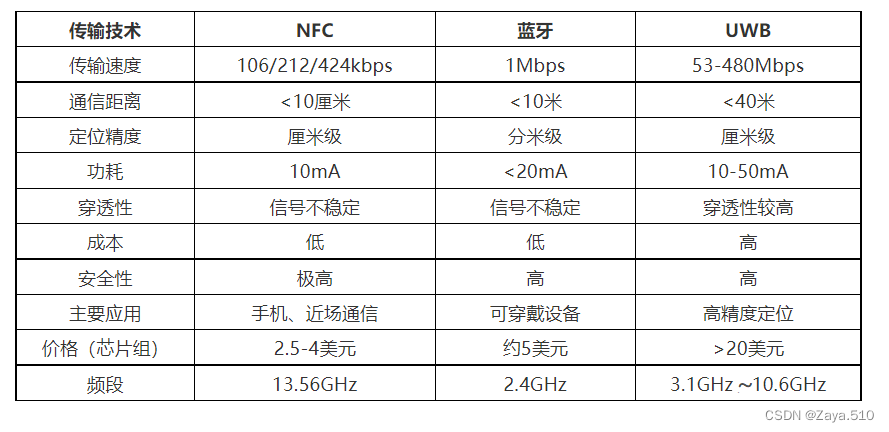
3.2 NFC、BLE、UWB技术的对比
4、实现方式
一般BLE会和NFC、UWB结合变成数字钥匙(digital key,缩DK),在汽车中实现无接触试驾、无钥匙开车门、钥匙分享、代驾/代洗车/代加油、分时租赁、车队管理、快递到后备箱等。
4.1 数字钥匙实现原理
硬件模块:蓝牙主控模块、蓝牙天线、UWB天线、NFC读卡器
软件服务:数字钥匙管理云平台、手机APP SDK、安全组件
| 数字钥匙管理云平台 | ●即PK服务后台,主要用于管理数字钥匙的生命周期,处理数字钥匙业务请求。 ●通过对接手机厂商后台实现对手机端车钥匙框架授信与认证,并通过对接车厂TSP平台完成车辆与设备信息获取与导入 |
| 手机APP SDK | ●SDK:软件开发工具包 ●APP是直接面向客户的车联网服务,通过集成数字钥匙SDK实现数字钥匙功能。可支持Android、IOS操作系统,并能适配智能手机和智能可穿戴设备 |
| 车端蓝牙主控节点与蓝牙天线 | ●车端蓝牙主控节点基于各蓝牙天线的信号强度(相位角、飞行时间等)对手机进行定位,通过发送蓝牙广播与手机建立通信连接,并支持与手机进行蓝牙配对、认证鉴权、车控指令处理和车身数据同步等功能 |
| NFC读卡器 | ●NFC钥匙是将带有NFC功能的设备(手机或智能穿戴设备)靠近车身某个部位(如B柱、外后视镜等)刷卡感应区,无需完全贴合即可感应解锁 ●NFC解锁可以在手机没电的情况下正常运行 |
| UWB | ●UWB是一种无载波通信技术,利用UWB的精准测距能力,只需靠近车辆,就能够将车辆布置的多个锚点与合法的手机相匹配,实现车辆近距离精确空间感知 ●当车主靠近车辆时,车辆首先会自动开启迎宾灯,随着距离的接近,会自动调整座椅位置等个性化设置,靠近车门时,自动解锁;当远离车辆时,也能够依据司机位置的变化自动锁车 |
4.2 数字钥匙的相关协议
数字钥匙相关协议/标准有:
①国外CCC组织发布的数字钥匙规范
②国内ICCE发布的数字车钥匙系统总体要求、手机-汽车互联 白皮书等
| CCC | ●Car Connectivity Consortium,简称CCC,美国车联网联盟 ●是世界上最大的汽车制造商的非营利机构,致力于行业之间的协作,为智能手机与车辆之间的连接制定全球标准和解决方案 ●CCC数字钥匙规范于2016年6月创建,到2021年共发布3版: ①数字钥匙1.0规范(2017年3月发布,第一代数字钥匙基于NFC近场通讯技术,实现了车辆进入与启动功能,但基本没有位置感知的能力。同时,NFC的通信距离只有厘米级,车主需要将数字钥匙贴近车身才能开启车门。此代数字钥匙的使用体验较差,同时功能拓展潜力不高) ②数字钥匙2.0规范(2020年5月发布,第二代数字钥匙是采用BLE蓝牙技术,是目前市占比最大的数字钥匙种类。蓝牙数字钥匙通信距离比第一代更远。第二代数字钥匙可以通过蓝牙信号的强弱粗略感知车与钥匙的位置关系,但其感知精度与准确性都有所欠缺) ③数字钥匙3.0规范(2021年7月发布,第三代数字钥匙是UWB、BLE、NFC三种无线通信技术相结合的产品。UWB技术使得第三代数字钥匙位置感知精度得到了质的飞跃。值得一提的是,UWB测距序列可以支持8000个安全位,钥匙和车端需要滚码才能解锁,极大地提升了数字钥匙的安全性。) Car Connectivity - CCC Digital Key | Car Connectivity Consortium |
| ICCE | ●Intelligent Car Connectivity Industry Ecosystem Alliance,智慧车联产业生态联盟 ●发布《数字车钥匙系统总体要求》、《手机-汽车互联白皮书》、《智慧车联产业生态联盟数字车钥匙系统 第2部分:蓝牙系统规范》 《智慧车联产业生态联盟数字车钥匙系统 第3部分:NFC系统要求》 |
5、应用场景
5.1 UWB+BLE+NFC
BLE默认是常接通的,较远地方使用蓝牙连接,进行身份认证、数据交互并粗略定位,并用蓝牙唤醒UWB;UWB则利用飞行时间来精准定位;NFC可在手机没电情况下进入车辆,但必须离车上读卡器1~2厘米内才能感应,可用于车外解锁和启动车辆。
②数字钥匙不仅仅是把钥匙,除了无感进入、启动等常规功能外,还有个性化设置、车辆共享、车队管理、共享租赁等场景。数字钥匙将与更多生态打通,承载更多功能
5.2 数字钥匙工作过程
(1)80 米范围内可以先用车内蓝牙模块扫描手机进行蓝牙连接和身份认证以及蓝牙粗略测距,同时唤醒UWB功能。
(2)10-20米范围 UWB 启动定位和测距功能。
(3)在3-10米的范围内设置为迎宾区,可触发车辆进行迎宾功能的车灯打开或者喇叭提示方便车主找车;走到距车 6 米的距离时,车内照明自动开启。
(4)当走到 1-3 米的范围内可以设置为解锁区,可自动解锁车门,自动调节座椅高度,后视镜折叠自动开启。
(5)当车主进入到车内,车内UWB锚点扫描到手机UWB信号时,按下启动键可以实现车辆的启动(扫描不到则无法启动)。
5.3 数字钥匙构成
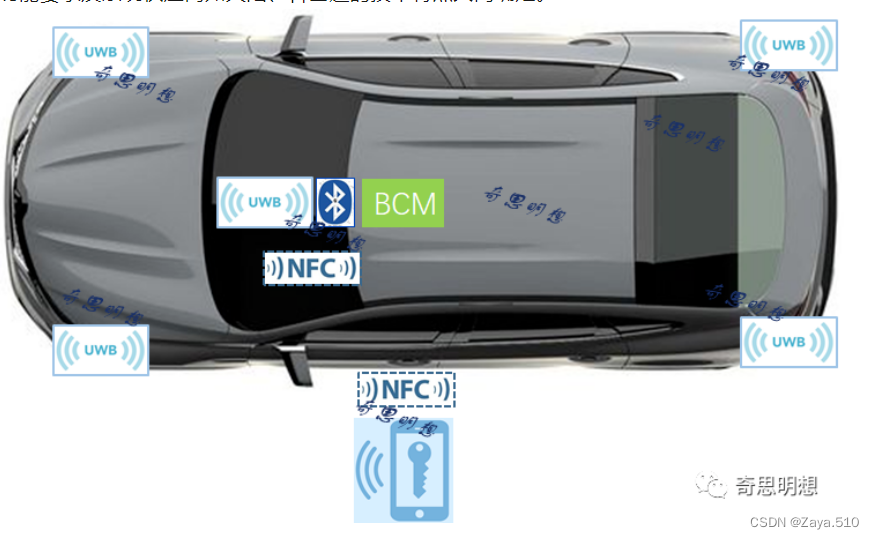
(1)BLE的定位精度在1~3米,一般10米外蓝牙就没什么定位精度了;UWB 主要通过 TOF 飞行时间来测距,因此定位精度高,可达到10-30cm,定位距离可达40米;NFC只能毫米级的定位距离
(2)安全性:PEPS无法做到防中继攻击和钥匙分享,BLE无法防中继攻击,但UWB信号中加入了安全时间戳,只有与接收端的滚码相匹配后才能得到对应的时间戳,进而解锁车辆,极大地提升了UWB数字钥匙的防中继攻击能力;另外因为UWB能在30米范围内精确定位钥匙位置,系统也会判定车钥匙不在有效范围内,如此一来攻击者便无法对系统进行欺骗
(3)UWB定位:TOF+TDOA+AOA融合定位(在UWB中详细介绍)
七、UWB天线
1、技术介绍
1.1 概念
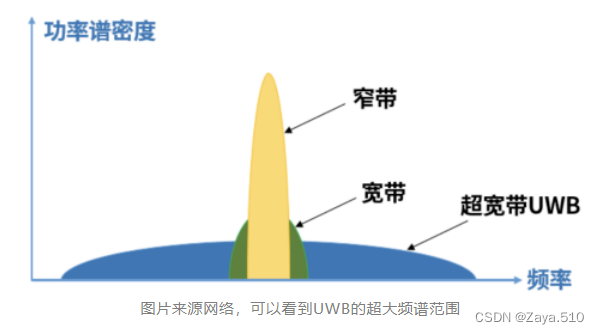
UWB(ultra wideband)也叫超宽带技术,是一种使用1GHz以上频率宽带的无线载波通信技术,与其它通信技术体制不同,UWB通过利用纳秒(单位:ns)至皮秒(也称微微秒,单位:ps)的非正弦波窄脉冲传输数据,利用间歇的脉冲来发送数据,脉冲持续时间短,一般在0.2~1.5ns之间,很低的占空比,因此其所占频谱的范围很大,数据传输速率可以达到几百兆比特每秒以上
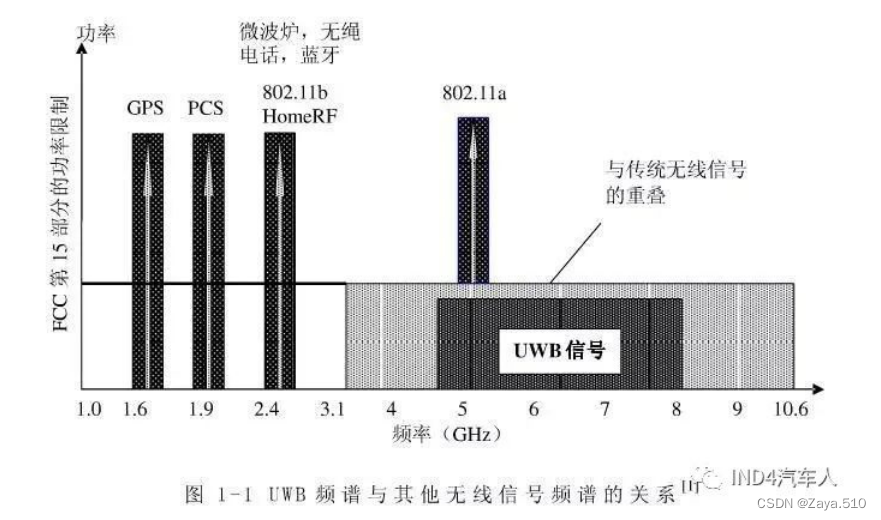
FCC批准UWB在严格限制条件下可在公众通信频段3.1GHz~10.6GHz上运行,共7.5GHz的频带;辐射功率方面,限定了远低于BLE/WiFi的级别,-41.3dBm;而频谱方面,UWB比BLE/WiFi的宽多了
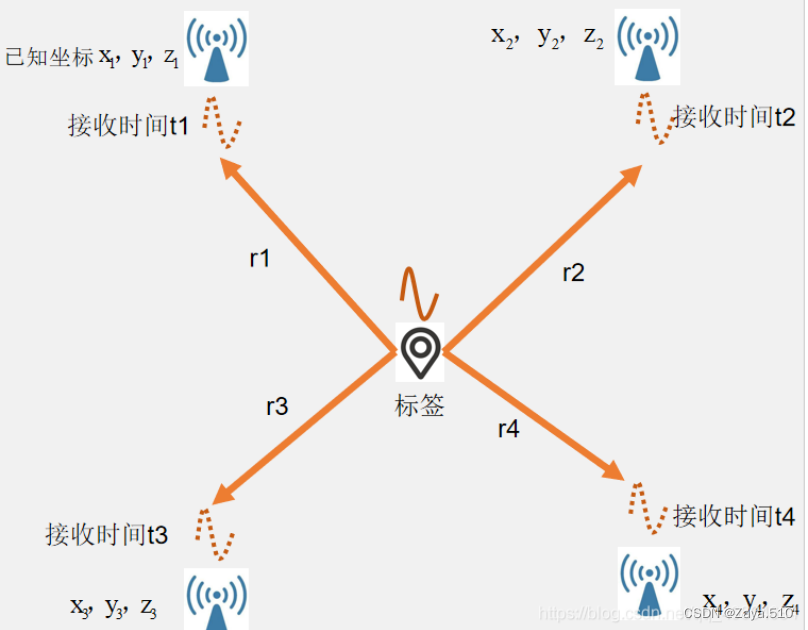
UWB技术采用飞行时间测距TOF,time of flight。车端中,UWB锚点可以实现钥匙和车身的测距功能。在发射装置中将含有时间戳的信号发射出去后,接收端通过接收到的信息计算出飞行时间,进而推算出飞行距离,实现精准的测距。根据钥匙与车端各锚点的综合距离,进行综合计算,这时候车端系统就可以实时获得钥匙所处的精确区域或者位置。
但UWB也有一个多径传输问题,UWB信号碰到障碍物,可能会被反射或者被吸收,导致测距未必是真实距离。这就需要通过一系列算法优化,借助多个锚点辅助,尽量精确测距。一般来说,UWB定位精度可以达到厘米级,但成本高
UWB测距功耗很高,无法像蓝牙一样,进行不间断地广播和连接,因此UWB测距功能,建立在蓝牙连接的基础上
1.2 UWB特征
| 抗干扰能力强 | ●UWB采用短脉冲信号在2ns级别,信号的时间非常短,所以信号冲撞的概率很小。即便发生了冲撞,也可以轻易的识别出UWB信号。 ●因此具有高信噪比的优点,可以有效对抗空间白噪声干扰和多径干扰 |
| 定位精度高 | ●UWB具有高带宽的特点,普遍具有500MHz以上的射频带宽,使得UWB具有高分辨的ToF(Time of Flight)飞行时间,可以精准测量信号的到达时间,提供更准确的距离和位置信息。 ●UWB技术的距离分辨能力强于其它传统技术路径,特别在复杂环境下其位置精度可比WiFi和蓝牙高两个数量级 |
| 共存性强 | ●UWB的功率谱密度很低,其一般频谱功率密度小于-41.3dBm/MHz。UWB一般在车端的频段范围为6-8GHz,这使得UWB与现有车端的其它无线技术干扰冲突的概率大幅降低 |
1.3 关键技术
UWB可以通过TWR、TDOA、AOA这3种算法进行测距
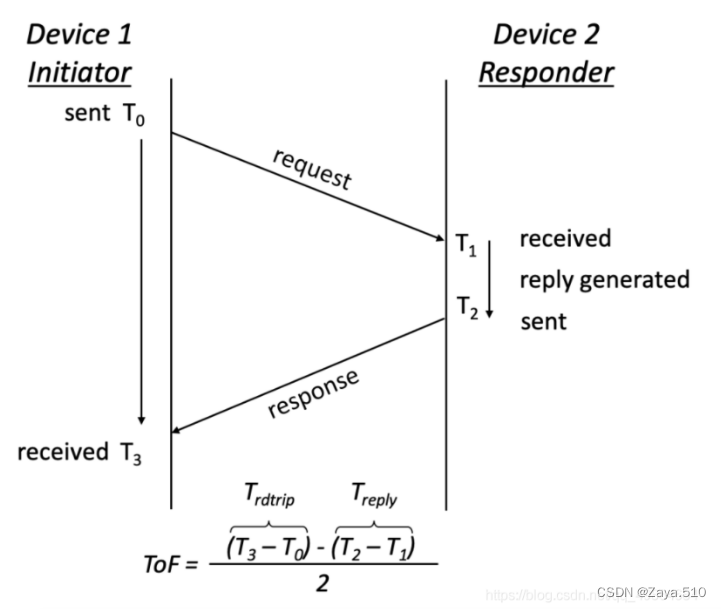
| TOF | ●Time of flight,飞行时间测距法,通过测量UWB信号在基站与标签之间飞行的时间来实现测距,TOF 测距方法一般属于双向测距技术TWR( Two Way Ranging ) ●TWR是每个模块从启动开始即会生成一条独立的时间戳 模块 A 的发射机在其时间戳上的 Ta1发射请求性质的脉冲信号,
|
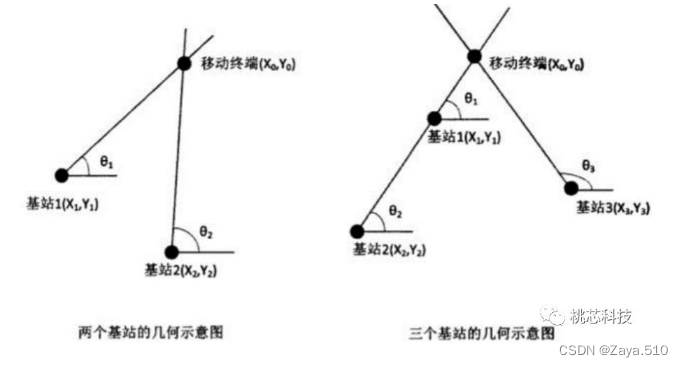
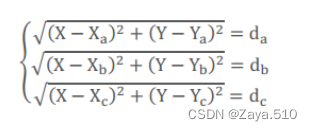
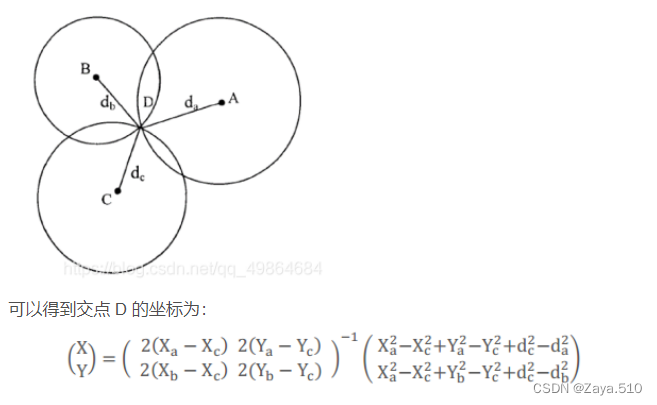
| TDOA | ●Time Difference of Arrival,到达时间差,利用UWB信号由标签到达各个基站的时间差来进行定位 ●TDOA(平面空间)使用三边测量法,以三个节点 A、 B、 C 为圆心作圆,坐标分别为(Xa, Ya), (Xb, Yb), (Xc, Yc),这三个圆周相交于一点 D,交点 D 即为移动节点, A、 B、 C 即为参考节点, A、 B、 C 与交点 D 的距离分别为da,db, dc。假设交点 D 的坐标为(X , Y)
●TDOA(3D空间)是一种利用到达时间差进行定位的方法又称为双曲线定位。标签卡对外发送一次UWB信号,在标签无线覆盖范围内的所有基站都会收到无线信号,如果有两个已知坐标点的基站收到信号,标签距离两个基站的间隔不同,那么这两个基站收到信号的时间点是不一样的。
TDOA技术不需要定位标签与定位基站之间进行往复通信,只需要定位标签发射一次UWB信号,工作时长缩短了,功耗也就大大降低了,故能做到更高的定位动态和定位容量。 |
| AOA | ●Angle of Arrival,到达角测距 |

各个优缺点
| TOF | ●优点:TWR可以有效降低因为时钟偏移引入的误差,从而保证实现高的定位精度,同时在复杂环境下定位效果相对TDOA和AOA会更佳 ●缺点: ①双边双向测距一次需要三个来回的UWB波,所以标签单次定位功耗较高; ②由于UWB信道同时容纳的UWB无线信号数量是一定的,TOF单次定位消耗的UWB无线信号数多,导致标签整体的并发量一般。 |
| TDOA | ●优点:上行TDOA时,标签只需要一次广播,然后多个基站监听到即可基于时间到达差来定位,所以单次定位功耗低 ●缺点: ①上行TDOA模式为了保证一定的精度和定位延迟,一般需要配置高刷新率,所以总体的标签续航其实也不高,如果标签高刷新率,也会影响标签的并发量; ②各基站需要做时钟同步才能保证多个基站时间到达差的准确性。由于标签端仅发送定位消息而不接收,数据聚合和协作定位很难实现; |
| AOA | ●优点:小型二维空间、定位精度要求不高的场景下所需基站数量较少 ●缺点: ①如果测距/方位因为遮挡/反射带来误差,那么定位精度就会严重下降。 ②单基站测向距离越远方位角误差更容易变大/受干扰的影响也更大,容易造成精度下降,定位精度相对TOF/TDOA都要低。 ③单次定位需要标签配合UWB-AOA基站每秒发送更多的数据帧,标签单次定位功耗相对TOF/TDOA都要高。 ④基站安装后,调试时需要较准方位,相对TOF/TDOA,安装调试复杂。 ⑤AOA模式对复杂环境的抗干扰性较差,在复杂环境下定位效果一般。 |
2、工作原理
UWB master的内部框图
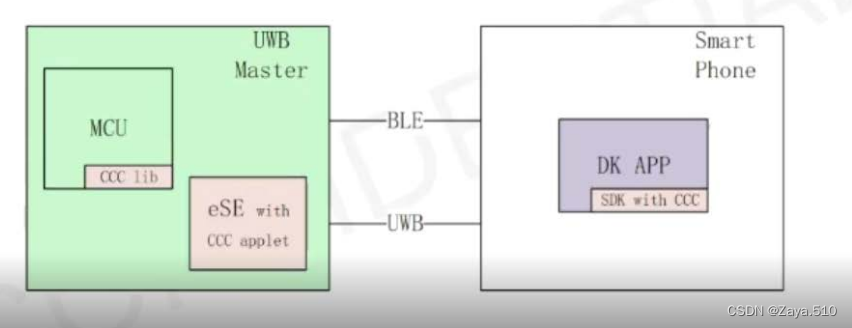
UWB系统增加了信息安全相关的硬件安全芯片,并且在安全芯片里面集成了和CCC协议相关的软件
3、相关参数
| 工作频率 | 3.1~10.6GHz |
| 定位精度 | 10~30cm |
| 定位算法 | TOF、TDOA、AOA |
4、实现方式
以下仅作为参考,并非是OEM唯一的实现方式
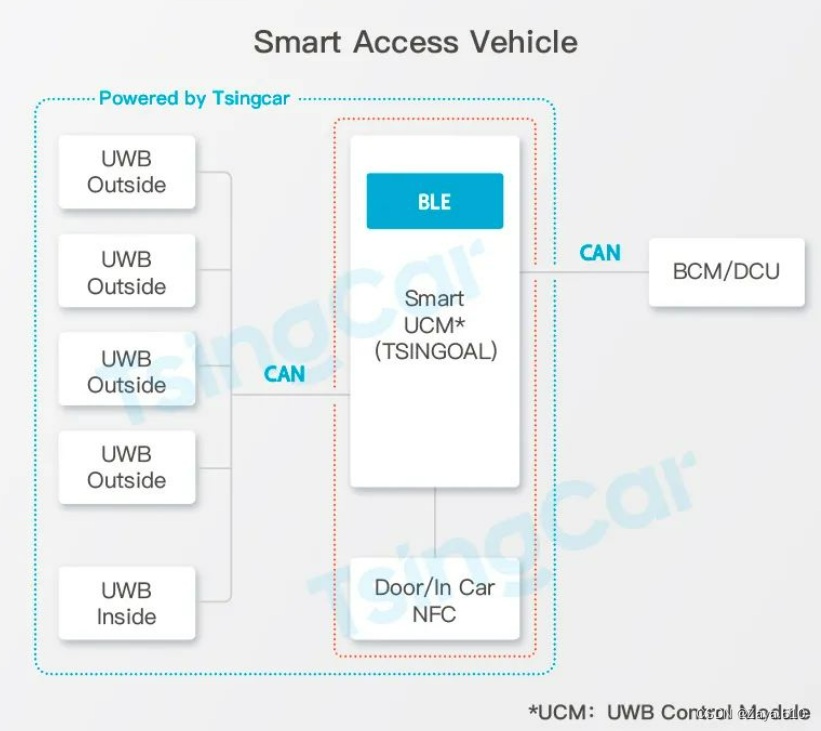
(1)UWB outside为车外UWB锚点,UWB inside为车内UWB锚点,UWB锚点包含了UWB射频和天线模组,实现钥匙与车身的测距功能;UWB定位标签(如手环、手机)是可移动物体,会向周围发送纳秒级的脉冲信号,UWB基站(也就是UWB锚点)接收到后,测量脉冲信号经过滤波、滑动等相关运算,得到各自的脉冲信号达到时间等定位信息,再将定位信息发送给中控单元;中控单元里内置了BLE蓝牙模组,实现与钥匙端的通信;中控单元同时负责接收UWB锚点信息,解算出钥匙与车身的相对位置关系,然后将位置信息再传输到车内其它的控制器(例如:BCM),从而进一步实现基于位置的应用层服务
(2)采用结构:车外4+车内1或车外0+车内4
| 车外4+车内1 | ●前后保险杠的两侧各一个 ●中控一个 |
| 车外0+车内4 | ●B柱两端 ●前后挡风玻璃的中上位置各一个 对于外部远距离测距不如车外4+车内1的结构 |
5、应用场景
5.1 数字钥匙应用
与BLE、NFC融合使用,进行精准测距
5.2 UWB雷达脚踢
现在大部分脚踢尾箱技术采用电容传感器方案。通过在车尾保险杠内放两条电容天线,通过电容变化可识别人是否有踢腿动作,同时结合车钥匙是否在车尾区域的定位,判断是否要执行开闭尾门的动作,但是工作不稳定,容易误触发或失灵,尤其是下雨天
毫米波雷达是另一种备选方案,通过对毫米波雷达回波的分析,可以有效检测踢腿的动作。并且毫米波不受周边电磁环境的干扰,雨水的影响也不大。目前车载毫米波脚踢尾箱雷达最大的问题是价格较昂贵(相比电容方案和UWB雷达方案)
UWB雷达提供了另一种选项。稳定性足够高(相比电容方案),成本适中(比电容方案贵,比毫米波方案便宜),低功耗(低于毫米波雷达),UWB 是全向天线灵敏度很高,并且可以在30m范围内能够做到厘米级精度
在车辆采用车外UWB锚点构型时,无需额外增加成本即可进行功能拓展。UWB硬件可以轻易拓展出UWB雷达功能,精准识别脚踢动作,实现智能尾门功能

5.3 UWB雷达活体检测
欧洲新车评估计划(E-NCAP)决定从 2023 年开始将车内儿童存在检测(CPD, Child Presence Detection)纳入测评汽车的评分系统;中国新车评价规程(C-NCAP)正在研究在2025版规程中加入CPD测试项目,为安装该装置的车辆提供加分项。业内一般都是用60GHz毫米波雷达来做,还有一些方案是用摄像头来做,上述方案的缺陷在于成本较高,以及用摄像头来做的话有隐私保护问题。UWB 在 50-60年代在军用用作探地雷达,UWB 雷达多普勒效应可以探测到人体呼吸非常小的动作,因此可以用于活体检测
八、GNSS、INS
1、介绍
首先INS和GNSS没有任何关系,在L3级自动驾驶的定位误差在10~30cm,高精地图要达到10cm,定位精度与地图精度匹配,因此需要GNSS+IMU的综合方案卫星定位原理是通过接收器与至少> 4 颗卫星通讯来确定该接收器的位臵,由于存在大气离层干扰,这种方法是伪距测量,精度只能达到米级。
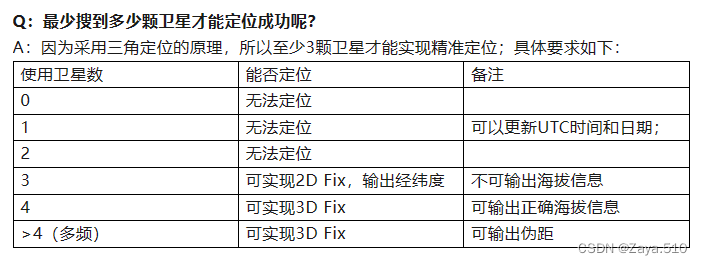
为什么大家都在用高精度定位,就是为了消除卫星定位误差,那么卫星定位误差通常有:
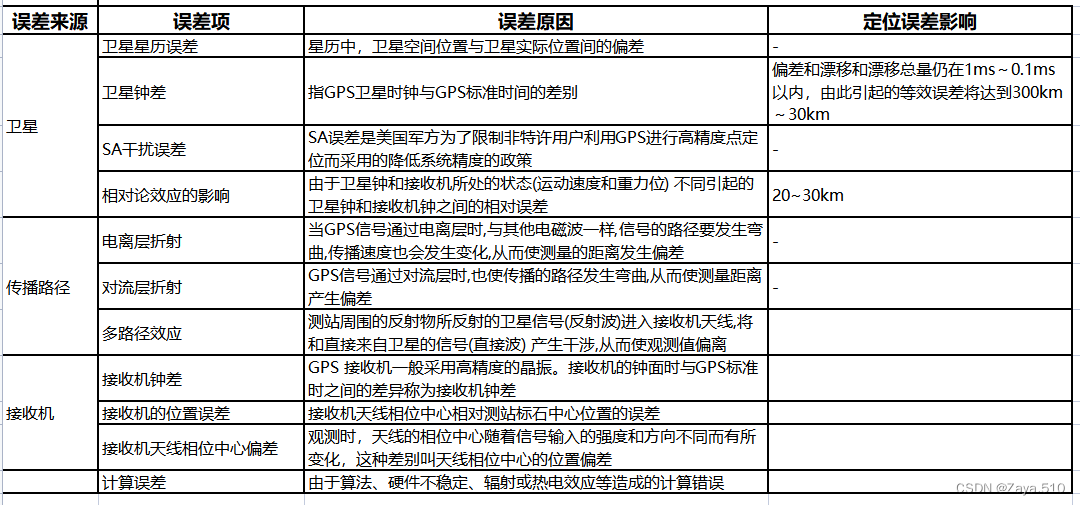
怎么修正误差,来提高定位精度?
亚米级定位:DGPS指RTD,Real Time Differential,伪距差分;基准站上,观测所有卫星,根据基准站已知坐标和各卫星的坐标,求出每颗卫星每一时刻到基准站的真实距离。再与测得的伪距比较,得出差分改正数,将其传输至用户接收机,提高定位精度。从而实现亚米级定位。
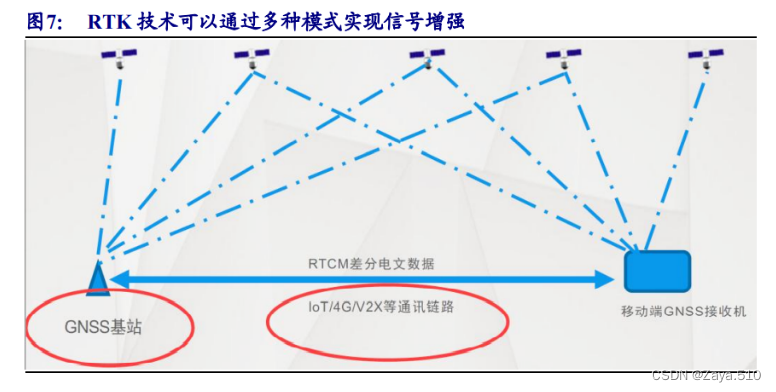
厘米级定位:RTK,real time kinematic,载波相位差分技术,需要基准站通过数据链,将其载波观测值及基准站坐标信息一同传送给用户站,用户站接收GPS卫星的载波相位与来自基准站的载波相位,并组成相位差分观测值进行及时处理,能实时给出厘米级的定位结果,历时不足一秒钟。用户站可处于静止状态,也可处于运动状态。
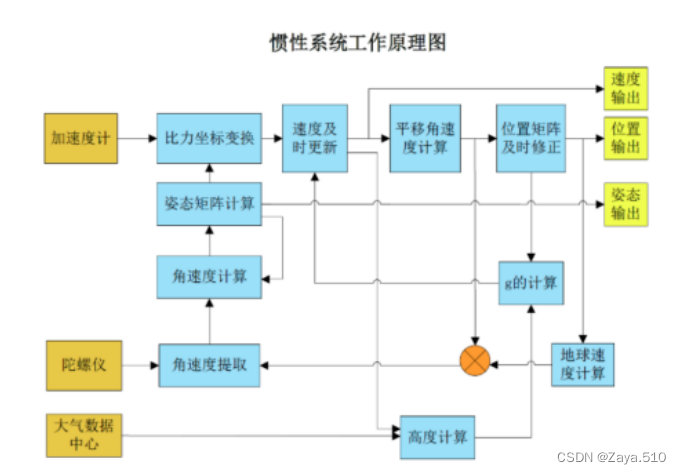
| INS (集成在TBOX内) | ●Inertial Navigation System,INS,惯性导航系统 ●Inertial Measurement Unit,IMU,惯性测量单元 ●惯性导航系统,一种不依赖外部信息,也不向外部辐射能量的自主导航系统(通过IMU测量的加速度和角速度来推算物体的位置、速度和方向的导航系统) ●特点:短期精度高,能稳定高频地输出信号,可以实现全天候全地点地工作,但由于采用积分算法,定位误差随载体运行不断累积。 ●INS组成:陀螺仪+加速度计 ①陀螺仪:有稳定指向一个方向的性质,并且不与外界的运动相关联,将这样的设备装在方向发生转动的物体上时,就可以测量出物体转动的角度 采用三轴陀螺仪:指向坐标轴中的xyz轴,在这三轴上分别再加上加速度计,就组成了惯性测量单元IMU,通过三轴角速度变化,三轴加速度,通过积分即可获得物体在三维空间的运动速度和轨迹,但是你会发现这样的装置只能测量出相对位移,即在时间记录中某两个时刻之间的位移。 ②加速度计能够测出物体运动的加速度值,配合时间记录,根据s=(1/2)a*t^2即可计算出距离 ●实际应用中: 需要利用GPS、北斗等方式产生的信号进行初始化,结合惯导信号和卫星导航信号进行进行卡尔曼滤波处理,得出其最佳推算的定位信息。
|
| GNSS (集成在TBOX内) | ●Global Navigation Satellite System,GNSS,全球导航卫星系统,涵盖中国北斗BDS、美国GPS、俄罗斯GLONASS、欧盟Galileo及日本准天顶QZSS共5套卫星导航系统。 ●是根据GPS/BD提供的位置信息,以及导航前规划的线路,指引用户行驶的一个系统,GNSS 更新频率在 10Hz 左右,无法保证高频稳定的信息输出。 ●GPS/BD是通过接收卫星发送的信号计算出自身位置的,当卫星被遮挡后,定位设备就无法定位了。遮挡可能是多种情况,比如经过高架桥、隧道等。这时候可能会出现导航中的车位图标不动了,直到车开到开阔地带会看到位置一下子跳过去;GNSS会通过速度、时间、距离的关系,根据最后一次卫星信号计算的速度,来推测可能的位置从而继续实现导航。但是如果车辆加减速变化较大时,最终推测位置和当前实际位置偏差也会很大,但不管怎样这都会带给用户不好的体验。 ●说说GPS:在全球的任何地方、任何时间都可观测到4颗以上的GPS卫星,GPS卫星向地球发射导航电文(系统时间、星历、历书、卫星时钟修正参数、导航卫星健康状况、电离层延时参数等内容),GPS终端收到卫星发送的数据,经解算即可确定当前位置,并以NMEA0183格式,WGS-84坐标系输出数据。 |
在实际应用中,以INS+GNSS,既解决了GNSS设备在丢星情况下失去导航位置/高架桥、多层停车场定位不准的问题,又解决了单纯惯导设备只有相对位移的困扰;在GNSS设备定位精度下降时,使用惯导设备补偿计算导航位置;在惯导设备精度下降时,使用GNSS设备补偿计算位置。GNSS跟惯导的结合能很好地解决了隧道、高楼、桥底或者树林等遮挡环境下的定位行驶问题。
1.1 惯导(3D陀螺仪)
惯导有4个方面的价值:弥补信号中断、增强对应干扰和欺骗能力、应对GNSS信号质量短暂下降、提供车辆保险所需的数据
| 弥补信号中断 | ●较弱的GNSS信号无法穿过建筑结构。因此,室内停车场、隧道等经常会导致GNSS服务彻底中断。即使在GNSS信号丢失的情况下,基于IMU的惯性定位也会继续运行,提供位置信息的互补来源,填补卫星信号可用性的缺口。 |
| 增强对应干扰和欺骗能力 | ●IMU还能增强应对干扰和欺骗的能力,更好地应对GNSS接收机最常遭遇的篡改威胁。例如,黑客可能使用高强度射频噪声来干扰接收机的运行。 ●黑客还可能使用伪造的GNSS信号欺骗接收机,诱使接收机报告错误的定位信息。在此类情况下,如果信号受到干扰,或信号被伪造而导致GNSS和IMU输出存在差异,IMU可以提供重要的信息数据,从而继续维持定位服务。 |
| 应对GNSS信号质量短暂下降 | ●无论是附近的蜂窝通信调制解调器产生的射频干扰,或是树木和建筑等形成的物理阻隔,都会造成卫星信号质量下降,GNSS接收机经常要面对这类问题。在暂时信号质量弱的情况下,可以使用基于惯性传感器的定位来控制GNSS接收机的位置估计,确保定位的准确度 |
| 提供车辆保险所需的数据 | ●IMU可以提供重要的原始数据,车队管理者和车辆保险公司可以从这些数据中获取信息,包括使用“移动时唤醒”功能进行盗窃检测,或检测停放的车辆遭受的轻微碰撞,帮助保险公司降低不合理索赔引起的开支。 |
1.2 GNSS技术
(1)什么是多模多频?
我们日常提到多种卫星系统和频段的应用,称为多模多频。
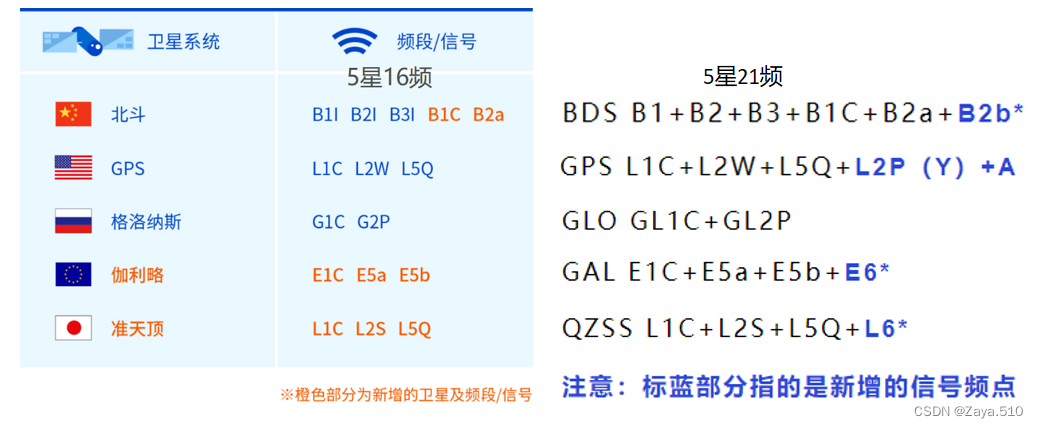
当前5星16频也被称作全模全频——涵盖中国北斗BDS、美国GPS、俄罗斯GLONASS、欧盟Galileo及日本准天顶QZSS共5套卫星导航系统的总计16个频点。
(2)什么是GPS双频定位?
GPS现有频段:
L1波段:1575.42MHz±1.023MHz
L2波段:1227.60MHz±1.023MHz
L5波段:1176.45MHz±1.023MHz
GPS双频定位——就是用2个频段(L1+L2或L1+L5)的接收机,接收不同频段的信号进行计算定位。利用双频对电离层延迟的不同,消除电离层对电磁波信号延迟的影响,可用于长达几千公里的精密定位。
双模定位优势:
(3)GNSS的定位精度参数,在进行惯导产品或者GNSS 产品选型,或者各家产品对比时,我们通常会看到厂商对产品定位精度的统计,如CEP、rms、百分位数67%、百分位95%、1σ、2σ、ppm。
| x百分位数(x%或x th) | ●表示计算出的x%位置的误差小于或等于精度值。 ●典型的使用值为50%、67%、75%和95%。 ●例如:具有5m(95%)的精度意味着在95%的时间内,定位误差≤5m |
| CEP | ●表示圆概率误差,百分位数50%/95%。表示返回的计算位置中有50%、95%的误差≤精度值。 ●例如2.5m CEP(50%),表示定位在2.5m精度的概率是50% |
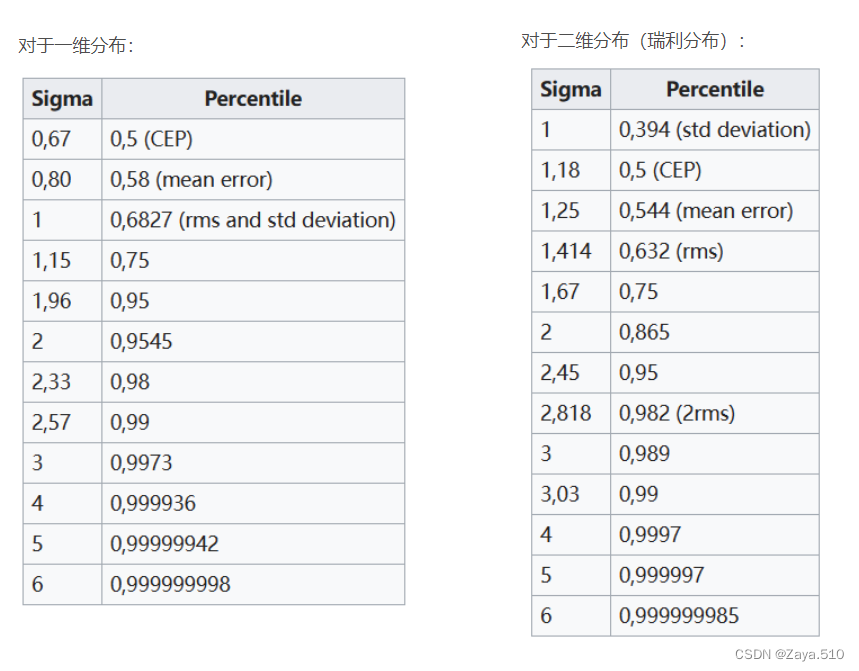
| rms均方根误差 | ●假设误差遵循正态分布(接近但不完全正确),它将对应于一维分布的百分位68%(例如垂直误差)和二维分布的百分位63%(例如水平误差)。 ●对于水平误差,该测量也被称为drms,可以有2rms或2drms(2倍rms)等变量。 |
| xσ | ●1σ对应于一个标准偏差,xσ对应于x乘以1σ。假设正态分布1σ对应于一维分布的百分位数68%。
对于二维分布,CEP和rms的转换由上表可知,CEP是1.18σ,rms是1.414σ,则1.414/1.18=1.198,CEP乘以1.2就差不多是rms的值。同理,CEP乘以2.4也就是2RMS的值。 |
| ppm | ●ppm是百万分之(几)的意思,1ppm=百万分之一 ●例如:“RTK:1cm+1ppm”,1ppm就代表如果基线距离每增加1公里,增加1mm的定位误差。 |
(4)为什么只能双频呢?
因为单片机使用的小尺寸的陶瓷天线,一般只能做到兼容2个频段(一般软件上也是多选2),无法做到同时兼容3个频段。所以通常是单选GPS或北斗;或者是GPS+北斗、GPS+GLONASS等两两组合的方式。
(5)为什么代码没问题,但搜不到卫星?
搜不到卫星,那么就是信号问题,“卫星→天线→模块→代码→输出”中的某个环节出错
1.排除空间天线无遮挡(如树木、建筑、高架桥)
2.确认是信号弱还是无信号,通过观察输出的GGA、RMC和GSA
①如果GGA中的UTC时间错误,定位指示为0,卫星数目不为0;或者RMC的UTC时间错误,日 期错误;GSA中卫星数目不为0,但是载噪比都很低,则可能是搜星慢,定位慢,信号差;
②如果GGA中的UTC时间错误,定位指示为0,卫星数目始终为0;或者RMC的UTC时间错误,日期错误;GSA完全没有任何有效输出,则可能是完全无信号。
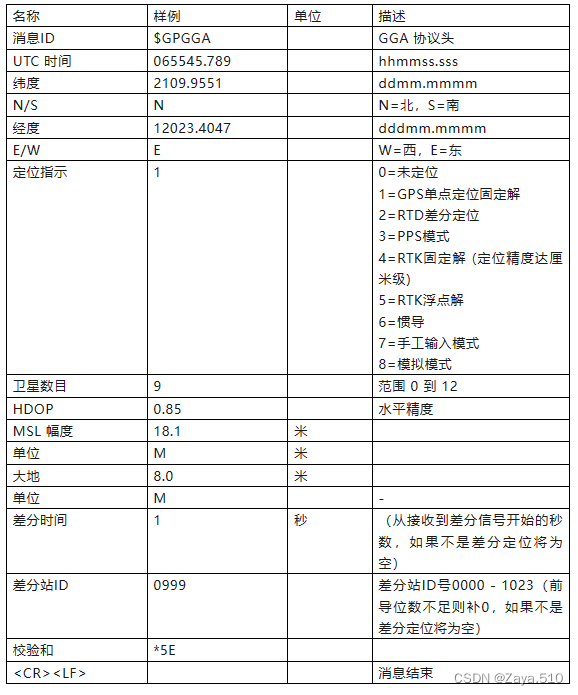
| GGA | 格式: $--GGA,hhmmss.ss,llll.ll,a,yyyyy.yy,a,x,xx,x.x,x.x,M,x.x,M,x.x,xxxx*hh 示例: $GPGGA,065545.789,2109.9551,N,12023.4047,E,1,9,0.85,18.1,M,8.0,M,,*5E
|
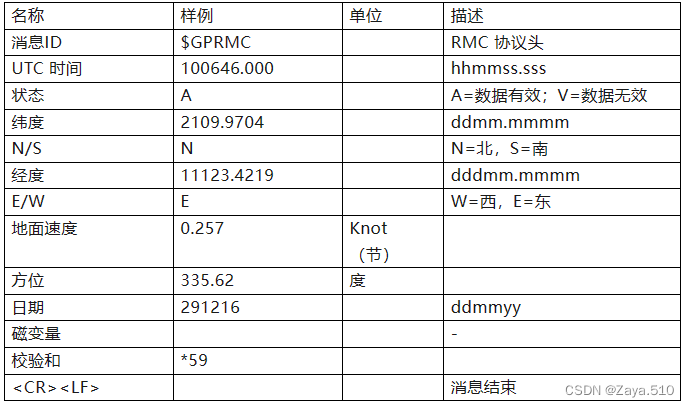
| RMC | 格式: $--RMC,hhmmss.ss,A,llll.ll,a,yyyyy.yy,a,x.x,x.x,xxxx,x.x,a*hh 例句: $GPRMC,100646.000,A,3109.9704,N,12123.4219,E,0.257,335.62,291216,,,A*59
|
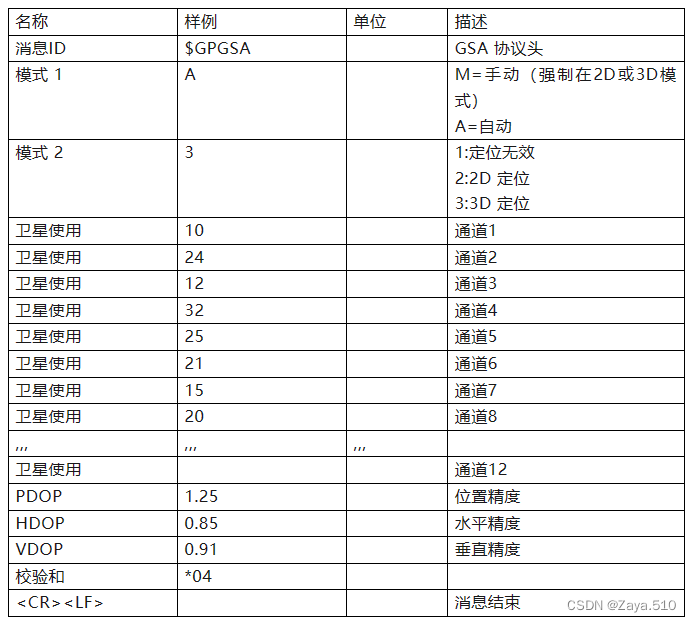
| GSA | 格式: $--GSA,a,a,x,x,x,x,x,x,x,x,x,x,x,x,x,x,x.x,x.x,x.x*hh 例句: $GPGSA,A,3,10,24,12,32,25,21,15,20,31,,,,1.25,0.85,0.91*04
|
3.如果搜星慢、定位慢、信号差,应改善天线设计,保证天线面朝上并且周边没有金属物遮挡,无射频干扰,应尽可能选用大的陶瓷天线,必要时可以使用有源天线(一般OEM都用无源GNSS天线)
4.如果完全无信号,大概率是天线设计错误。譬如,没有给有源天线开启供电,错误使用天线型号(如芯片仅支持GPS,天线仅支持北斗;错误的使用GSM天线接收信号)等
(6)GGA、RMC、RSV什么区别?
都是NMEA-0183标准的要求,解释如下:
| 标识符 | 含 义 |
| GGA | 时间、位置、卫星数量、定位方式 |
| GSA | GPS 接收机操作模式,定位使用的卫星,DOP值,定位状态 |
| GSV | 可见GPS卫星信息、仰角、方位角、信噪比 |
| RMC | 时间、日期、位置、速度 |
| VTG | 地面速度信息 |
(7)UTC能换算当地时间嘛?
UTC:协调世界时,又称世界统一时间、世界标准时间、国际协调时间,即格林威治平太阳时间,是指格林威治所在地的标准时间,也是表示地球自转速率的一种形式,UTC基于国际原子时间(TAI),通过不规则的加入闰秒来抵消地球自转变慢的影响,是世界上调节时钟和时间的主要时间标准,在时刻上尽量接近于世界时的一种时间计量系统,准确度为每日数毫秒,陆地的话,因为很多国家可能跨越非常多的时区,却使用统一时间,所以只能查表(如北京时间UTC+8)。如果是海洋,则根据经度计算时区。
(8)手机可以测试GPS信号的APP?
Android:GPS Status;GPS Test+;GPS Data+
iOS:GPS Test+
(9)什么是冷启动时间,怎么缩短该时间?
①常规情况下,定位模块上电开机后,通过天线搜索卫星,解析卫星发射的数据(导航电文),然后内部生成星历,再经过复杂的计算,从而得到当前精确的位置(3D Fix)。这个过程称之为“冷启动”。根据信号强度、芯片运算能力,通常耗时几十秒到几分钟不等。
这个过程中,搜星+生成星历文件耗时最久,搜星耗电量最大。
②缩短冷启动:采用非“冷启动”方式,即“温启动”或“热启动”或者使用AGPS辅助定位
“x启动”都是以最后一次定位时间和位移距离作为判断依据
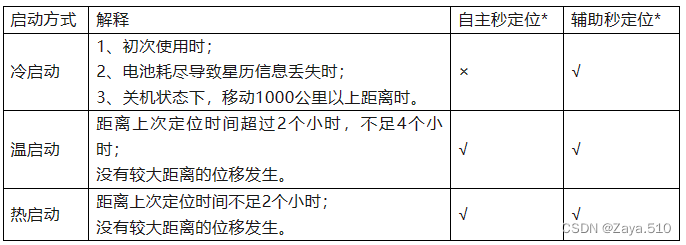
自主秒定位:根据模块内保存的星历,实现快速搜星、定位。
辅助秒定位:使用AGPS辅助,实现快速搜星、定位。
也就是说,“温启动”和“热启动”情况下,定位模块是可以实现自主秒定位的。
(10)什么是AGPS辅助定位?
在传统GPS定位方式中,定位模块需要全频段搜索以找到可用卫星,因而耗时较长。而“AGPS辅助定位”方式,是通过网络直接下载当前地区的可用卫星星历数据,并将星历文件发送给定位模块,定位模块只搜索特定的卫星,从而提高了搜星速度,减少设备耗电,但不能提高定位精度。
“AGPS辅助定位”应用条件比较苛刻,需要满足:
①卫星信号接收条件良好,至少可观测到颗卫星(推荐使用有源天线)
②定位芯片必须支持AGPS辅助定位
③必须可以准确获取当地地区星历数据
④如果是冷启动,需要等待通信芯片附着成功,接收到星历数据后,传输给定位模块
⑤如果是温启动/热启动,亦需要重新搜星
以上海合宙通信科技有限公司的Air8xx系列模块为例,它的AGPS辅助定位基本流程如下:
1、设备从蜂窝基站获取到当前位置的小区信息;
2、设备通过蜂窝网络,将当前蜂窝小区信息传送给网络中的AGPS位置服务器;
3、APGS位置服务器根据当前小区信息查询该区域当前可用的卫星信息(包括卫星的频段、方位、仰角等相关信息),生成对应星历文件(几k),并返回给设备;
4、通信模块通过串口把收到的星历文件传输给定位模块;
5、定位模块根据星历文件,得到的可用卫星信息,快速找到当前可用的GPS卫星,针对性的搜星,大大提升定位时间。
注意:星历文件更新频率:如果是冷启动后,不关闭定位模块,下载一次“AGPS辅助定位”数据(星历文件)即可。运行中,定位模块内会自动生成对应的星历文件,无需重复下载;如果是不定时启动、关闭,那么关闭4小时内启动是没必要更新的(“温启动”范畴);如果大于4小时,模块内保存的星历已失效,则必须更新星历文件(重新下载)
(11)地图软件坐标怎么有偏差?
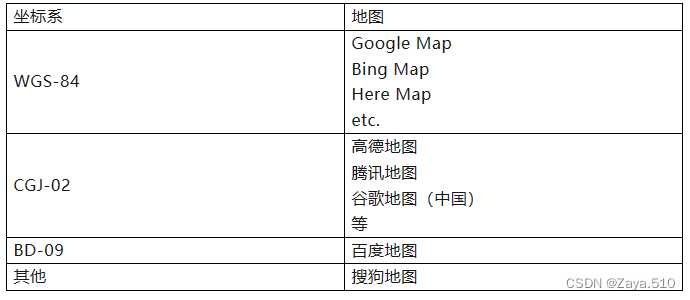
定位模块的数据格式为NMEA-0183,使用WGS-84坐标系,国际上很多地图也使用WGS-84,因此设计时坐标没偏差;中国国家测绘局要求所有从事地理测量、地图绘制的公司、单位机构、个人必须使用GCJ-02坐标系(G表示Guojia国家,C表示Cehui测绘,J表示Ju局),所以开发者/用户如果将WGS-84的经纬度填入国内的地图软件,就会产生极大的偏差
((所有的电子地图、导航设备,都需要使用GCJ-02坐标系。第一步,地图公司测绘地图,测绘完成后,送到国家测绘局,将真实坐标WGS-84的电子地图,加密成“GCJ-02火星坐标”,这样的地图才是可以出版和发布的。第二步,所有的面向客户的设备厂商,要在软件中加入该转换算法,将定位模块输出的真实WGS-84坐标,转换成GCJ-02的坐标。这样一来,“以偏治偏”,坐标系才可以完全匹配,也就没有“偏差”了)
以下是各个地图所采用的坐标系,其中百度,搜狗自成体系,自立坐标,百度较为特殊,需要 WGS-84 → GCJ-02 → BD-09 两次转换
(12)什么是千寻位置®
千寻位置®是由中国兵器工业集团和阿里巴巴集团共同发起成立。千寻位置基于北斗卫星系统(兼容GPS、GLONASS、Galileo)基础定位数据,利用遍及全国的超过2000个地基增强站及自主研发的定位算法,通过互联网技术进行大数据运算,为遍布全国的用户提供精准定位及延展服务,目前,服务覆盖全国范围的,只有千寻位置®
用户在千寻位置®购买相关套餐后,可以使用千寻位置®提供的SDK或NTRIP协议接收RTCM差分数据。由定位模块输出的GGA数据上报到千寻位置®平台,将平台下发的RTCM数据传输给GPS芯片,然后打印GPS芯片解算后输出的GGA。
(13)RTD、RTK收费?
可以到千寻位置®官网查询。参考价:RTD ¥6/月/设备;RTK ¥400/月/设备。
(14)怎么能减少GPS搜星的耗电
采用星历预测,当卫星信号正常(CN值大于27)情况下,硬件连续运行5~10分钟(电流28mA,相对比较耗电),即可在内部自动生成星历,并预测出未来2~3天的星历,此过程不需要耗费任何流量,星历预测的前提条件是:
1、星历被下载过一次(外部输入给GPS芯片星历文件,或者GPS芯片自主3D Fix)
2、GPS信号CN值不低于27
3、正常定位过一次;
4、RTC(实时时钟)不掉电(当主电源断开后,只有RTC电源不断,星历预测功能才可以使用,RTC断开后星历预测功能将不再起作用);
(15)星历下载和星历预测什么区别?

无论在什么状态下,都是GPS信号CN值越好,定位越快;6小时内的星历下载保存可以将RTC电源断开(星历保存有效的时间和卫星的运行轨迹相关,星历保存时间越长,原来星历里的可见卫星就越少。因为GPS卫星绕地一圈是12个小时,所以,星历数据有效期6小时已是极限值。超过这一时间后,原来的星历数据就没有意义了,鉴于星历保存的时间越短,其对应星历里的可见星就越多,所以2小时内的星历比保存6小时内的星历对定位的帮助更大)
(16)卫星发送逻辑?
卫星每30s的周期性发送卫星信号,误差一般为10m
(16)地图数据?
惯导+卫星导航+地图数据,实现车载导航功能
1.3 同步问题
在通信里,比如CAN,LIN都需要使用晶振进行同步,那么在车上安装的各种传感器(雷达、摄像头等)也需要统一的时钟源,一般会采用GPS作为统一的时钟源来给各个传感器提供基准时间,各个传感器再校准内部的时钟时间
基于GPS的时钟常采用PPS+NMEA,另一种方式是用以太网的时钟同步协议,这里讲一下基于GPS的
GPS能够从卫星获得高精度的时钟信号,因此通常作为整个系统的时钟源。常规的GPS单元都支持输出精确到毫秒的秒脉冲信号PPS和包含年月日时分秒信息的NMEA指令,通过PPS和NMEA的组合就能够实现对激光雷达或主机的毫秒级时钟同步。
PPS+NMEA的优点是协议简单,容易实现;缺点是必须基于RS232。多个设备之间实现同步比较困难。
PPS(Pulse Per Second)是GPS时钟同步装置的一种,是一种脉冲信号,用于提供高精度时间和定位信息的接口。它在一定时间周期内输出1hz的脉冲串,精确到毫秒级别,该脉冲表明GPS系统已经收到了GPS卫星广播的一个新的位置参考,由GPS接收机输出准确的位置和时间信息。PPS接口还可用于ADAS、车辆跟踪和安全系统
1PPS=1Hz=1次/秒
3、相关参数
| GNSS支持 | ●无源天线 ●BDS/GPS/GLONASS/GALILEO/QZSS/SBAS ●AGPS辅助定位 ●星历预测 |
| 定位方式 | ●支持L1=L5双频定位 ●支持L1、L5频段独立定位 |
| PPS输出 | ●支持双PPS输出 |
| 通道数 | 144 |
| 纯硬件冷启动 | <25s |
| 纯硬件热启动 | <1s |
| AGPS秒定位 | <10s |
| 冷启动灵敏度 | -148dBm |
| 热启动灵敏度 | -160dBm |
| 重新捕获灵敏度 | -160dBm |
| 跟踪灵敏度 | -164dBm |
| 水平定位精度 | 0.85m |
| 速度定位精度 | 0.1m/s |
| 授时精度 | 10ns |
| 捕获电流 | 60mA |
| 跟踪电流 | 40mA |
| RTC功耗 | 70μA |
4、实现方式
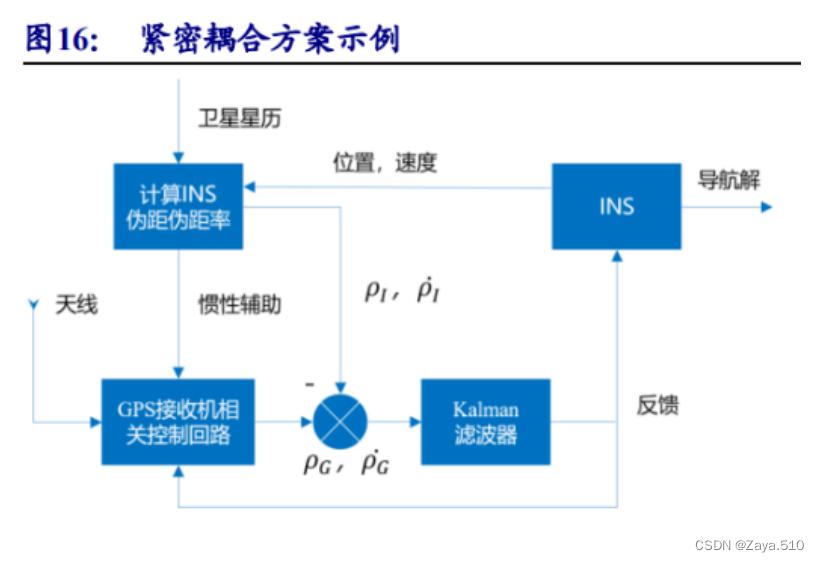
GNSS+INS紧密耦合的组合导航形式,应用了卡尔曼滤波器,GNSS与INS双向信息传输,在动态工作下精度和可靠性更高,INS 信号也用于计算载体相对于 GNSS 卫星的伪距和伪距率, 来辅助 GNSS 信号的接收过程,以此提高精度和动态性能;即使 GPS 信号无法跟踪时也可以利用 INS 独立导航,而且利用 INS 可以提高 GPS 信号重新捕获速度,改进跟踪回路能力,提高抗干扰性和保密性。组合导航可以保障高动态、高频率定位输出的稳定性,在辅助高速过弯方面优势明显。
九、NFC
1、介绍
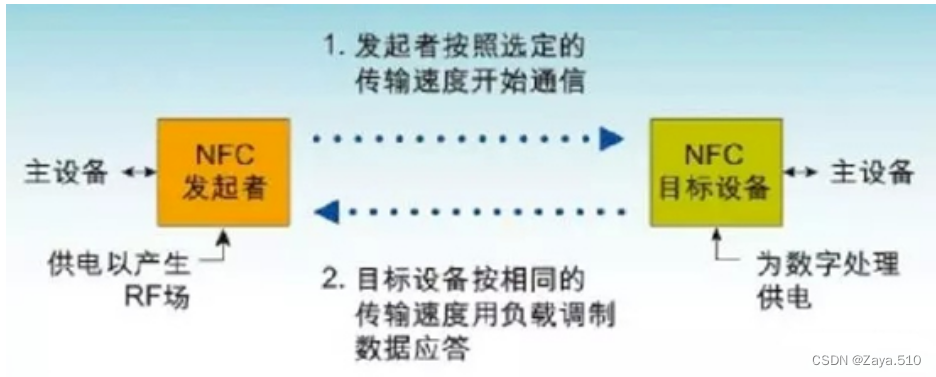
NFC,Near Field Communication,近场通信,通信范围在几厘米内,最大数据传输速率为424kb/s的近距离双向通信技术;发起设备和目标设备,两者之间以交流磁场方式相互耦合,并以ASK方式或FSK方式进行载波调制,再传输数字信号。智能数字钥匙系统产生无线射频磁场来发送数据给智能终端,智能终端通过响应发起设备所发出的命令,并13.56选择由发起设备所发出的或是自行产生的无线射频磁场进行通信。
NFC由RFID技术进化发展,作为RFID的延伸,具有成本低、容量大、安全性更高的优点
1.1 NFC协议

1.2 NFC频段和认证标准
频段:NFC属于RFID中一种,RFID有低频(125kHz~135kHz)、高频(13.56MHz)、超高频(860MHz~960MHz),NFC只工作在13.56MHz的频段
认证标准:FCC/IC认证、CE认证
| FCC/IC | ●对应标准FCC Part 15.225/RSS210,标准适用频段13.110~14.010MHz ●认证需提供:1台样机、原理图、方框图、操作描述、天线报告、说明书 |
| CE | ●对应标准EN 300 330,标准适用频段13.56MHz RFID ●认证需提供:1台样机、原理图】方框图、操作描述、BOM、天线报告、位号图、说明书 |
2、工作原理
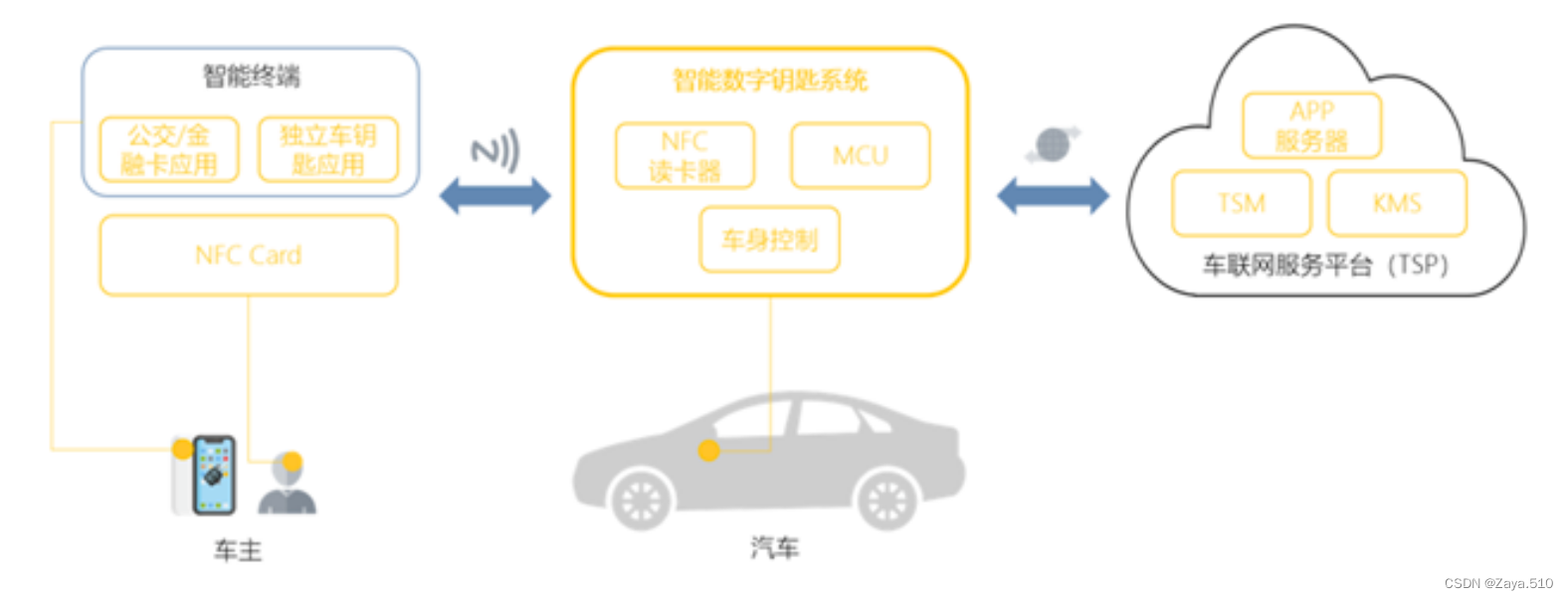
数字钥匙:利用数字钥匙与NFC读卡器模块进行通信,向NFC读卡器模块传输数据;
NFC读卡器模块:接收数字钥匙传输的数据进行认证,校验数字钥匙是否具有控制车辆的权限;
PEPS模块:PEPS模块通过CAN总线接收NFC读卡器模块的认证结果,以决策是否执行启动控制;
BCM模块:汽车车身控制模块通过CAN总线接收NFC读卡器模块执行指令。
十、RFID
1、介绍
1.1 概念
radio frequency identification,射频识别,又称电子标签、无线射频识别。
RFID是一种非接触式的自动识别技术,通过射频信号自动识别目标对象并获取相关数据
1.2 RFID系统架构
由读写器、电子标签、RFID中间件和应用系统组成
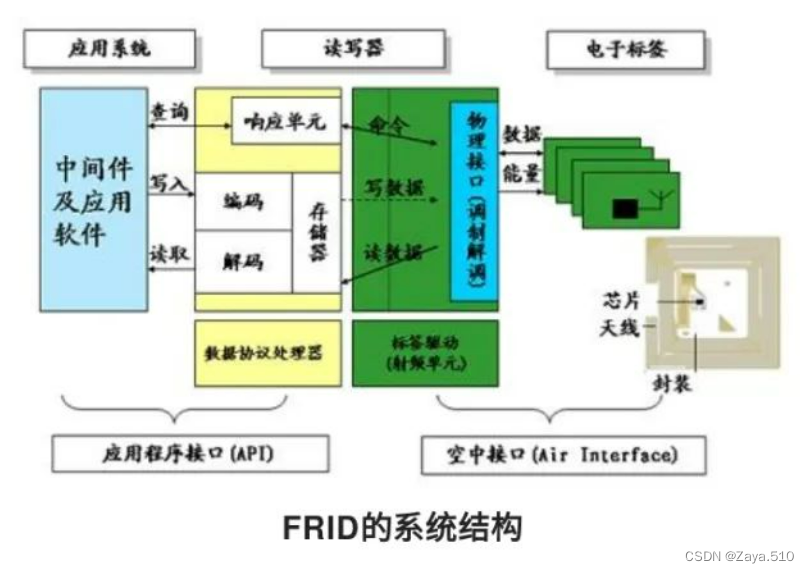
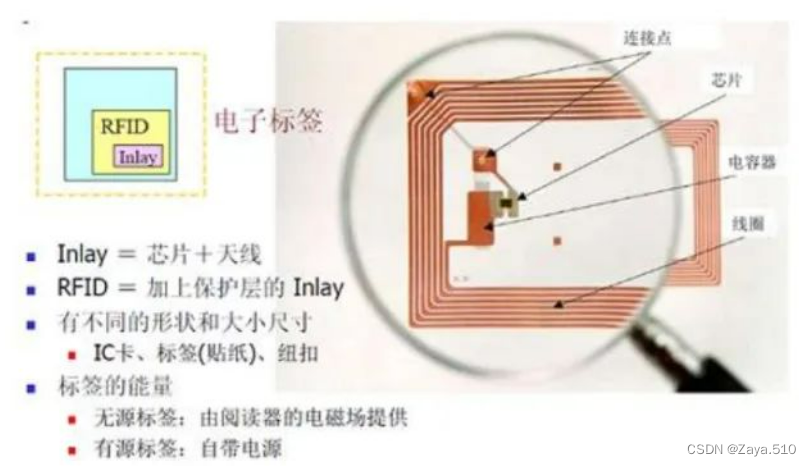
| 电子标签electronic tag | ●也称应答器或智能标签,是一个微型的无线收发装置,主要由内置天线和芯片组成
|
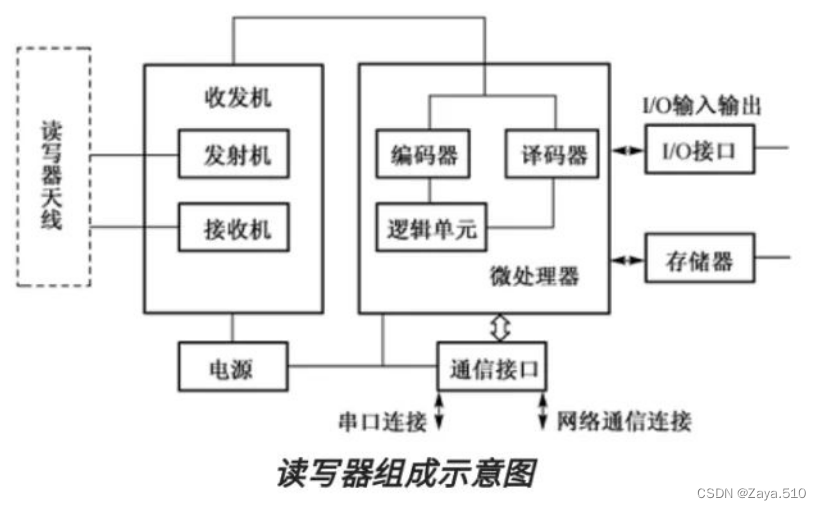
| 读写器芯片 | ●是一个捕捉和处理RFID标签数据的设备,他能够将数据写入RFID标签中,因此叫读写器 ●读写器硬件由收发机、微处理器、存储器、外部传感器/执行器等等组成
|
| 天线 | ●天线是一种以电磁波形式接收前端射频信号功率或辐射出去的设备 ●用来实现导行波与自由空间波能量的转化 ●RFID中天线分为电子标签天线和读写器天线,分别承担接收和发射能量 ●选择读写器天线需要考虑以下因素: ①天线的类型 ②天线的阻抗 ③应用到物品上的RF的性能 ④在有其他物品围绕贴标签物品时RF的性能 |
| 控制器 | ●作用: ①与应用系统软件进行通信 ②执行从应用软件发来的动作指令 ③控制读写器芯片与标签的通信过程 ④基带信号的编码与解码 ⑤执行防碰撞算法 ⑥对读写器和标签之间传送的数据进行加密和解密 ⑦进行读写器和电子标签之间的身份认证 ⑧对外部设备的控制 |
1.3 RFID频段划分
| 125~134KHz | 低频,用于汽车防盗和无钥匙进入等 |
| 13.56MHz | 高频 |
| 860~915MHz | 超高频 |
| 2.4~5GHz | 微波 |
2、工作原理
以RFID在汽车上应用为主
(1)通过低频天线来探测智能钥匙与车身基站(ECU)间的相对位置,并通过高低频信号(315Mhz/433.92Mhz、125Khz)建立双向交互通讯
(2)低频信号唤醒智能钥匙,高频信号认证及决定车辆防盗安全性能、PEPS的系统性能(PEPS一般会跟BCM做集成,因此关于PEPS控制的由BCM控)
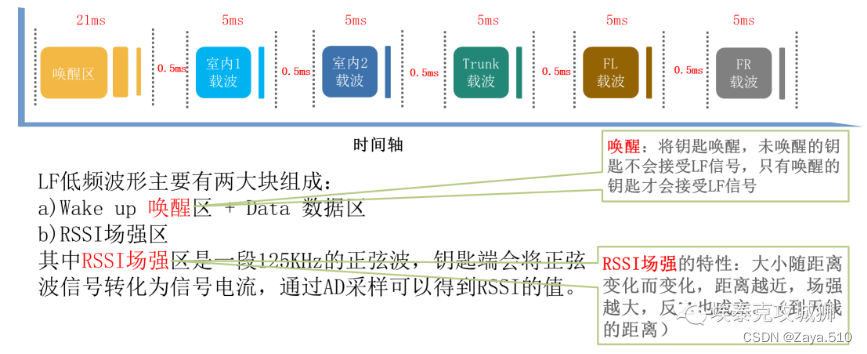
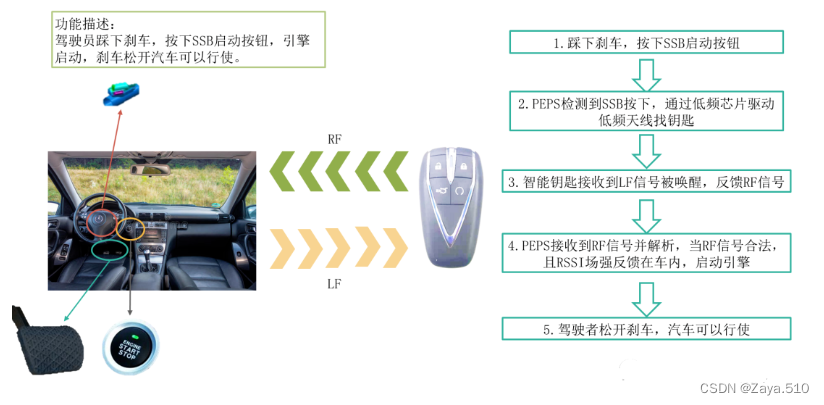
| 低频唤醒 | ●当钥匙进入有效范围内(离车1.5m内),车主按门把手按键或一键启动开关,PEPS会通过低频芯片驱动天线发送LF信号来唤醒钥匙(一般用车辆ID作为唤醒码); ●钥匙接收到LF信号之后通过自身的智能芯片对报文进行验证,钥匙唤醒。 ●低频信号为:短距离传输,承载信息量小,没有长距离解锁的能力 ●唤醒码有3种:钥匙IDE作为唤醒码;车辆ID作为唤醒码;迎宾的唤醒码 |
| 高频认证 | ●钥匙唤醒后将自身的ID以高频RF信号形式发送给PEPS ●PEPS通过高频芯片接收到RF信号,识别ID码后通过低频信号向钥匙发送验证码,钥匙接收到验证码后通过特定的跳转码算法对该验证码加密并将加密结果通过高频信号发回给PEPS,PEPS接收到加密数据正确后会发出解锁门锁或是打开后备箱等操作指令。 ●高频信号:长距离传输,承载信息量大,让高频信号称为越来越复杂的解锁代码的载体,也可长距离遥控解锁 |
为什么用低频-高频方案?
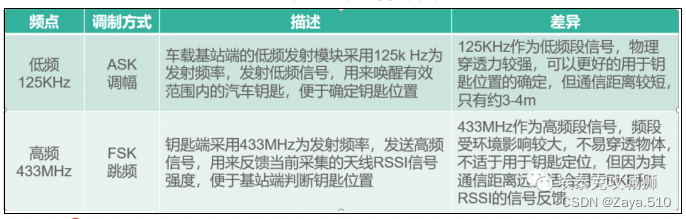
—PEPS的低频的工作频率是125KHz,耦合方式为电感耦合;低频天线在空间某点所产生的磁感应强度幅值与该空间点的位置相关,使得感应电动势的幅值不受钥匙与低频天线的相对姿态影响,只与位置有关,所以通过监测钥匙的感应电动势的幅值可以得到钥匙与低频天线的距离,通过多根低频天线的距离信息,可以确定钥匙相对于整车的位置关系。而高频因受环境影响大,物理穿透弱不利于钥匙定位
确定钥匙的位置在车内还是车外,可以防止车主离开时钥匙忘在车内而自动落锁和防止钥匙在车外就能启动车辆。
为什么不用高频作为触发信号?
一旦使用高频信号作为触发信号就意味着当你坐在家里,陌生人走到你的车边拉动门把手整车解锁天线会发出高频信息并被你的智能钥匙接收然后车钥匙发出高频解锁信号被RFR射频接收机接收,车解锁,不安全
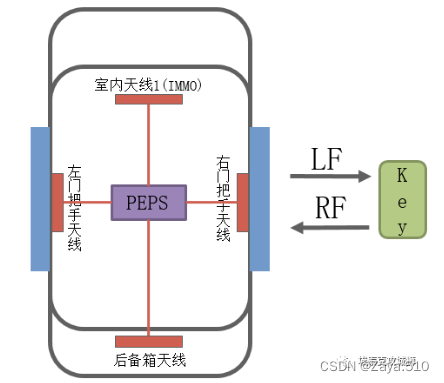
2.1 PEPS组成
由BCM、PEPS、智能钥匙、门把手天线、低频天线、一键启动按键SSB、电子立柱锁、后备箱按键组成
| 低频天线 | ●以自身为中心,半径为1.5m的球形空间内发送125Khz的低频信号用来探测智能钥匙与各低频天线间的相对位置,并将测得的钥匙坐标传送给PEPS、PEPS根据坐标判定是否执行开启车门以及启动车辆等操作 |
| 电子立柱锁 | ●通过内置的小型电机驱动锁舌的伸缩动作实现转向管柱的闭锁和解锁功能 ●新能源车上不采用这种防盗了 |
2.2 SSB
start/stop button,该开关带有1个背光灯和2个状态指示灯(ACC灯、ready灯)并且集成IMMO线圈和基站(用于钥匙无电时,紧急启动车辆)

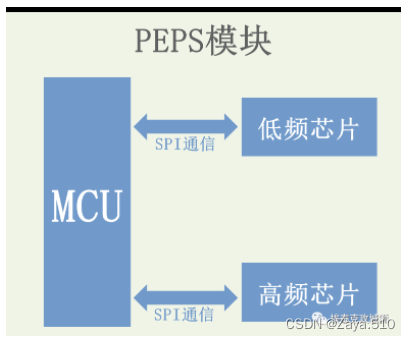
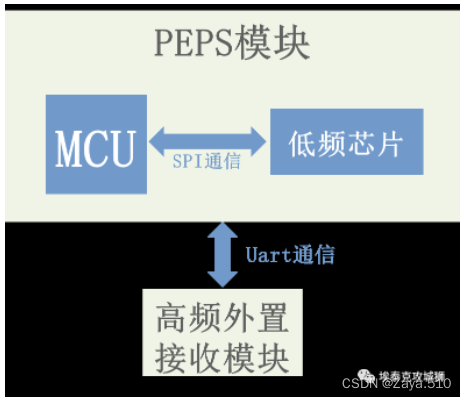
2.3 PEPS架构
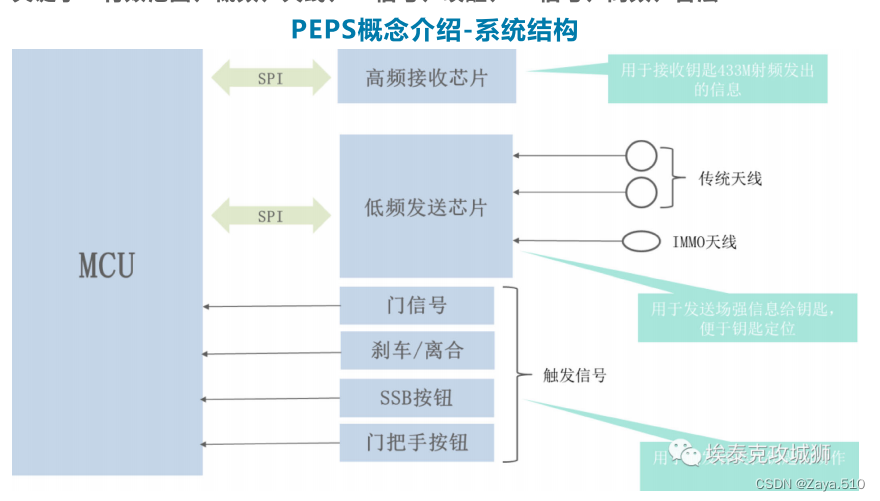
PEPS模块可以内置RF接收芯片或者外置RF接收芯片
| 内置RF接收芯片 |
●优点:成本便宜 ●缺点:放置位置需要跟随主模块,接收效果差 |
| 外置RF接收芯片 |
●优点:位置灵活,接收效果好 ●缺点:增加一个模块,成本提高 |
2.4 频点介绍
2.5 硬件选型(来源于埃泰克参考)
| 高频芯片 | ●Atmel的AT5781/AT5785芯片: ①调制方式:频移键控FSK ②载波频率:433MHz ③通信方式:SPI ④主要功能:接收钥匙端发来的RF信号(RF信号是钥匙通过FSK调制到433MHz载波上的数据) |
| 低频芯片 | ●NXP的NJJ29C0A: ①调制方式:幅移键控ASK ②载波频率:125KHz ③通信方式:SPI ④天线通道:6个 ⑤支持天线:门把手天线/传统天线/IMMO天线 ⑥主要功能:驱动天线发送LF信号(LF信号:通过ASK调制到125KHz载波上的数据) |
| 天线 | ●门把手天线:带微动开关,天线和开关共用线束,因此需要保证天线和开关的驱动不能同时进行(钥匙必须有电),用于门把手位置 ●传统天线:传统LF天线(钥匙必须有电),用于门把手天线、室内定位天线、后备箱天线 ●IMMO天线,仅含有电感,但并不是不要电容,电容需集成在PEPS的PCBA上(钥匙可以没电),用于室内多功能定位天线、IMMO天线 |
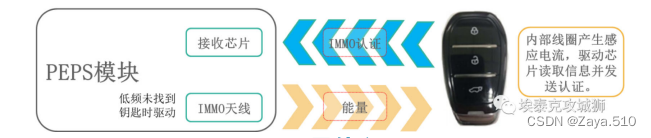
2.6 IMMO认证
IMMO是PEPS系统的备用认证方式
(1)当钥匙电量耗尽,可以将钥匙置于IMMO天线附近来认证车辆
(2)IMMO天线通过5cm内的超近距离电磁场将能量传递给钥匙(此时钥匙可以没电),激发钥匙内部线圈的感应电流来驱动钥匙发送IMMO认证,以完成钥匙在低电量或无电情况下的通信认证。
2.7 ESCL电子转向柱锁
由原来机械钥匙的锁舌对转向柱进行锁止变为由电机驱动锁舌锁止,但在GB 15740防盗中规定防盗可以选择锁转向、传动、换挡任意一种,可以换挡防盗,这样就不需要用ESCL了
2.8 为什么要RSSI场强和场强标定?
(1)首先按需要知道钥匙到底在哪个位置,要标定车内和车外的边界以实现无钥匙进入和启动
(2)位于钥匙内的3D天线接收到低频信号后,按一定算法将X,Y,Z轴方向的信号强度转换成电压信号,又称RSSI,然后再通过高频回传给PEPS系统
●车内借助车内天线再车身边界以内的交集确定
●车外区域由相应门侧天线最远距离以内去除车内部分确定
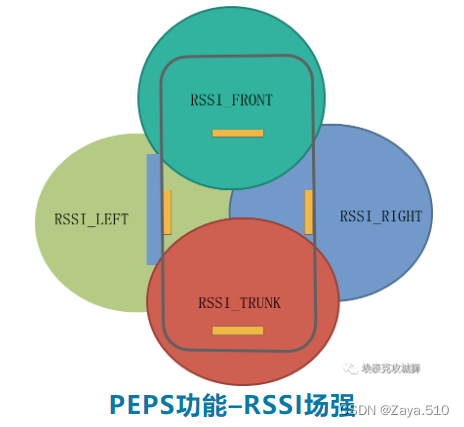
(3)场强RSSI是用来查询钥匙的位置(车内或车外)
(4)场强标定
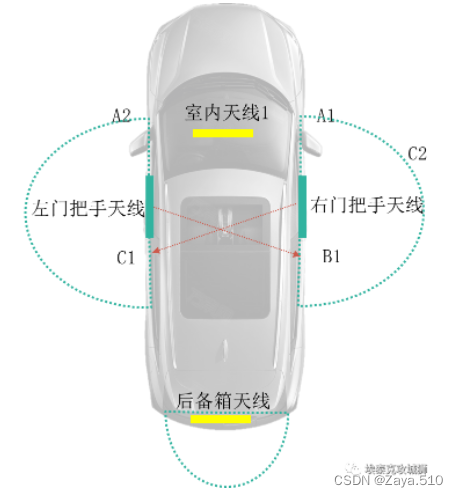
| 天线布置 | ①室内天线1:多功能天线(IMMO天线) ②后备箱天线:传统天线 ③左/右门把手天线:传统天线 备注:由于室内1是多功能天线,可以复用IMMO功能,则IMMO天线省略。 |
| 场强标定策略 | A1:室内天线1在右前车窗上的场强均值 A2:室内天线1在左前车窗上的场强均值 B1:左门把手天线在右后车窗上的场强均值 C1:右门把手天线在左后车窗上的场强均值 C2:右门把手天线在车侧的场强域 A1 == A2 (室内天线1 > A1) || ((右门把手天线 > C1 )&&(左门把手天线 > B1)) 备注:场强满足上述公式,表示钥匙在车内 (右门把手天线> C2) &&(右门把手天线 > 左门把手天线) 备注:场强满足上述公式,表示钥匙左侧有效范围,可以进行无钥匙进入
|

2.9 高低频通信流程
(1)硬件信号触发钥匙查询
(2)PEPS模块通过低频芯片驱动天线发送LF信号唤醒钥匙
(3)钥匙唤醒后,通过AD采集磁场场强RSSI,并将RSSI和钥匙信息通过RF信号反馈给PEPS
(4)PEPS模块根据RSSI结果和标定值做比较,确定钥匙位置(在车内或车外)
2.10 滚动码
(1)RKE会遇到的问题
| 当发生重放攻击怎么办? | 引入滚动码概念,每次按下一次钥匙滚动码会自动加一,当下一次使用钥匙就会比上次使用的滚动码大一,所以被盗取的滚动码并不能打开车辆 |
| 什么是滚动码? | 每次按键触发自动加一,辅助身份验证,预防重放攻击,保护车辆安全 |
| 如果钥匙远距离按下,此时车辆没有收到,下一次数值会加一,怎么办? | 一般汽车允许接收当前码之后的几百个码,只要车钥匙发送的码在这个窗口内,汽车都认为有效 |
| eeprom存储滚动码较为频繁,如果存储过程中意外断电,可能出现eeprom错乱,导致钥匙失效,怎么办? | 需要引入二次巡回逻辑强制重新同步,但这种功能降低了安全性,属于被迫策略(必须小心确保重新同步序列不被窃贼轻易记录并模仿) |
(2) 密文
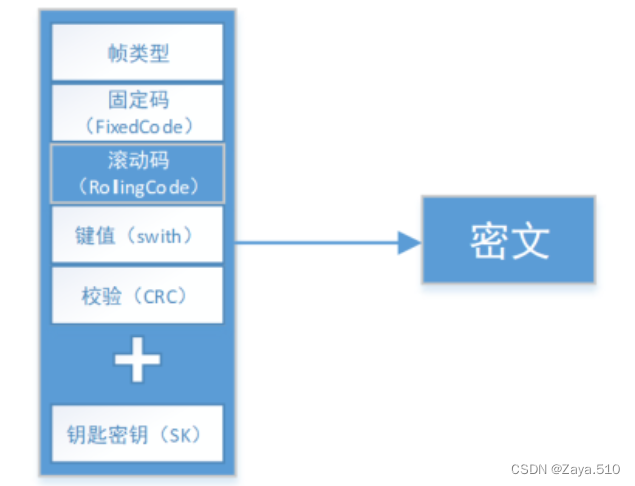
2.11 钥匙学习
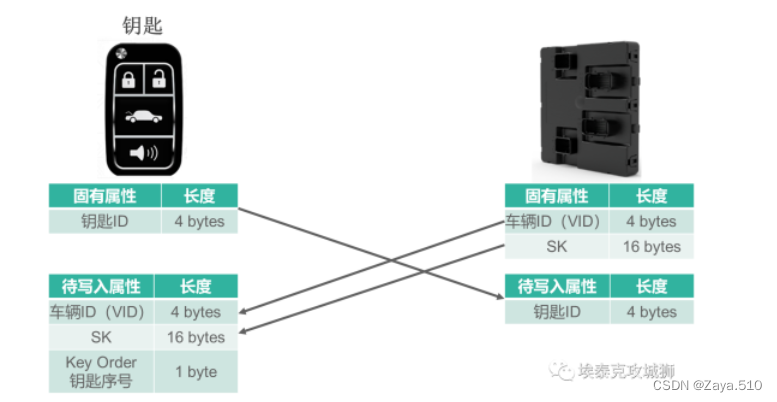
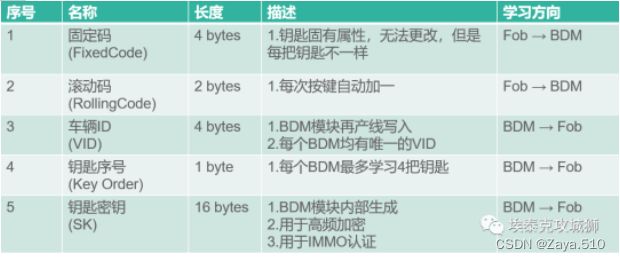
钥匙在学习过程中,高低频通信是一个信息交换的过程,BDM模块需要将固定码和滚动码学习到eeprom中,而钥匙需要接受BDM模块发送的VID,Order和SK,存入自身eeprom。
VID,又叫做低频唤醒id,主要是用来唤醒钥匙,在找钥匙的时候一次性唤醒所有已学习的钥匙,然后等待钥匙依次回复RF高频给PEPS模块。
31钥匙学习指令:31 01 57 02、
31钥匙擦除指令:31 01 57 04 合法:已学习过的钥匙
2.12 认证
PEPS与VCU认证
(1)VCU接收到整车电源状态跳转到ON,向PEPS发起认证请求,发送一连串的随机数
(2)PEPS收到VCU发送的随机数,通过密钥SK和加密算法对随机数进行加密,并把密文发送给VCU
(3)VCU接收到密文后,用解密算法进行解密,得到正确数据后,即认证成功,否则认证失败
注意:认证过程中,加密和解密算法是提前约定好的,使用的密钥也要一致。
3、相关参数
| 低频调制方式 | ASK |
| 高频调制方式 | FSK/ASK |
| 低频 | 125KHz |
| 高频 | 433MHz |
4、应用场景
PEPS(Passive Entry Passive Start)无钥匙进入和无钥匙启动,通过RFID实现,PEPS识别距离在1.5m内(因为低频天线的侦测范围为0.8~1.5m)
| 无钥匙进入 | ●当车主携带智能钥匙并用手触碰车门把手上的电容传感器后,PEPS 控制器会驱动门把手上的低频天线扫描智能钥匙,扫描到并且通过认证后,就可以自动开锁 |
| 无钥匙锁车 | ●车主关闭车门并触碰门把手,此时PEPS控制器驱动车内和车外门把手上的低频天线同时扫描智能钥匙,如果车内扫描到钥匙,则无法锁止,如果车内扫描不到钥匙而且车外扫描到了,则锁止 |
| 无钥匙启动功能 | ●当车主携带智能钥匙在车内,按下车内一键启动开关,就可以启动车辆 ●当车内检测不到钥匙时,IMMO天线起作用 |
4.1 无钥匙进入

4.2 无钥匙开启后背门

4.3 无钥匙启动
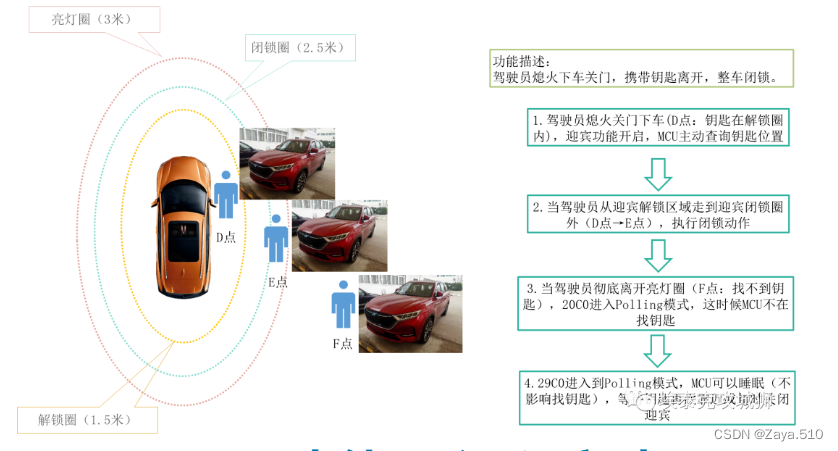
4.4 迎宾解锁(需要配置高性能天线,能主动识别)
 4.5 迎宾闭锁(需要配置高性能天线,能主动识别)
4.5 迎宾闭锁(需要配置高性能天线,能主动识别)
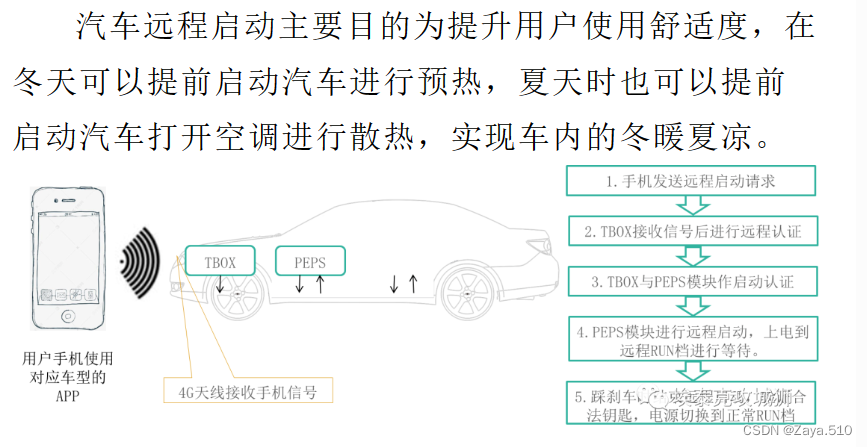
4.6 远程启动
十一、TPMS
1、介绍
国内自2020年1月1日开始,所有车都强制要求安装TPMS(GB 26149)
一般情况下,胎压的正常范围在2.3-2.8bar,最高不高于3.0bar(1bar=100kPa),最低不低于2.1bar。当然有些品牌车型胎压值可能不一样,需要具体分析判断
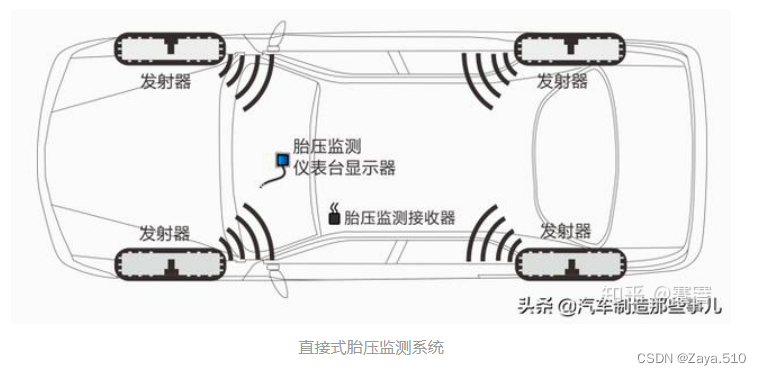
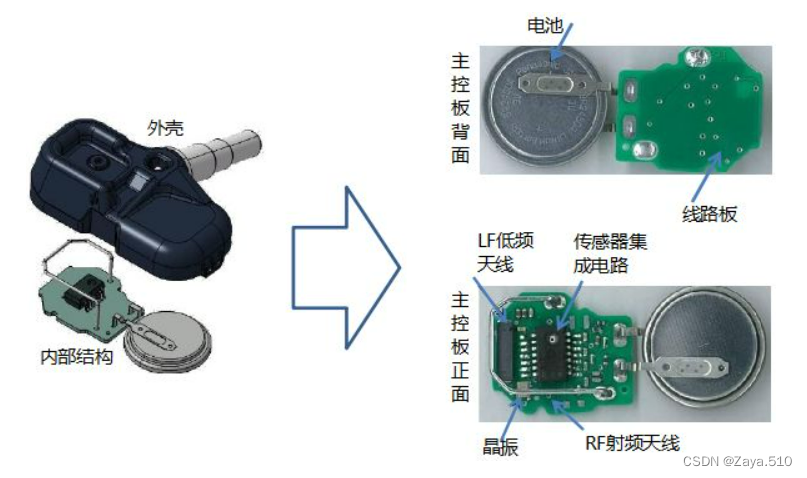
Tire Pressure MonitoringSystem,胎压监测系统,胎压监测主要分为两种,一种是间接式胎压监测(Wheel-Speed Based TPMS,简称WSB),另一种是直接式胎压监测(Pressure-Sensor Based TPMS,简称PSB)。另外还有一种复合式TPMS
| 直接式 | ●利用安装在每一个轮胎里的压力传感器来直接测量轮胎的气压,利用无线发射器将压力信息从轮胎内部发送到中央接收器模块上,然后对各轮胎气压数据进行显示。当轮胎气压太低或漏气时,系统会自动报警。直接式又分内置式和外置式 ●直接式胎压监测装置可以提供更高级的功能,随时测定每个轮胎内部的实际瞬压,很容易确定故障轮胎。 ●一般都是用直接内置式
|
| 间接式 | ●当某轮胎的气压降低时,车辆的重量会使该轮的滚动半径将变小,导致其转速比其他车轮快。通过比较轮胎之间的转速差别,以达到监视胎压的目的。间接式轮胎报警系统实际上是依靠计算轮胎滚动半径来对气压进行监测。 ●间接系统造价相对较低,已经装备了4轮ABS(每个轮胎装备1个轮速传感器)的汽车只需对软件进行升级。 ●间接式胎压监测装置没有直接系统准确率高,它根本不能确定故障轮胎,而且系统校准极其复杂,在某些情况下该系统会无法正常工作,例如同一车轴的2个轮胎气压都低时 |

2、工作原理
2.1 直接式工作原理(内置传感器)
直接式胎压监测系统,通过在轮胎里面加装四个胎压监测传感器,随着车轮一并转动,没有任何线束与其连接的;那么在汽车静止或者行驶过程中对轮胎气压和温度进行实时自动监测,并对轮胎高压、低压、高温进行及时报警,避免因轮胎故障引发的交通事故,以确保行车安全(俗称胎压显示);
每一个传感器都内置在轮胎里位于气门口附近,会与气门做在一起,每一个单独的传感器靠电池供电,将测量的胎压数值通过无线传输至接收器,然后显示出来。


2.2 计算
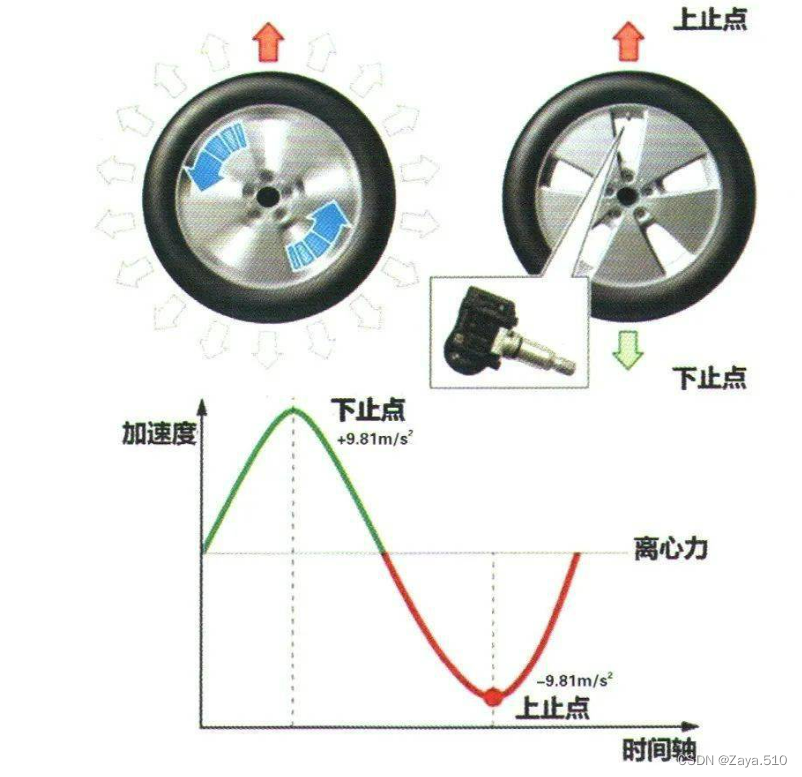
根据原理图,轮胎每转动一圈,传感器的加速度信号就有一次波峰(传感器处于轮胎的正下方)、一次波谷(传感器处于轮胎的正上方)。由此,传感器就会通过判断自身的加速度数据很容易知晓当前装配的轮胎是否正在转动,并且也能知道轮胎转动时胎压传感器位于轮胎的哪个位置上。
3、相关参数
| 轮胎压力kPa | 冬季:230~250 夏季:210~230 |
| 工作电压 | 传感器:2.1~3.6V TPMS控制器:9~16V |
| 高频载波频率 | 433.92MHz±65kHz |
| 低频载波频率 | 125KHz±10KHz |
| 低频调制方式 | ASK |
| 高频调制方式 | FSK/ASK |
| TPMS控制器通信 | CAN |
| 防护等级 | 传感器:IP6K9K TPMS控制器:IP5K0(具体看布置位置) |
| 监控范围 | 100~900kPa |
| 监测时间 | 存储模式:压力60s周期一次,不发数据 静止模式:压力12s周期一次,温度60s一次 运行模式:压力4s周期一次,温度60s一次,加速度60s一次 报警模式:压力2s周期一次,温度60s一次,加速度60s一次 |
| 胎压精度 | 0℃~90℃时误差为±5.5kpa -40℃~0℃或90℃~125℃时误差为±10kpa |
| 温度误差 | -20℃~90℃误差为±3℃ -40℃~-20℃或90℃~125℃时误差为±5℃ |
4、实现方式
4.1 胎压传感器(发射器)爆炸图

4.2 数据发送过程

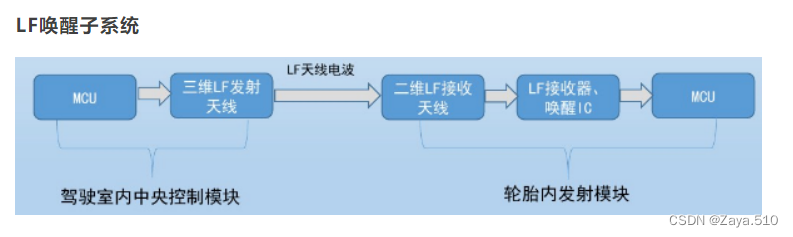
将LF((Low frequency低频)唤醒技术运用到发射模块中,车子上电后,由TPMS控制模块发射低频信号,胎压监测传感器里的LF天线接收到低频信号后,产生感应电压,唤醒MCU,这样可以省电。
发射模块:
(1)接收到LF低频信号后,唤醒MCU
(2)通过胎压监测传感器,收集轮胎气压、温度和加速度等数据信息;
(3)MCU信号处理器将数据转变为电信号,传至高频发射器RF(RadioFrequency射频,频率范围从300KHz~30GHz之间);
(4)通过433.92MHz的高频波段将数据信息发射出去
接收模块:
(1)车辆上电后,先发低频信号唤醒发射模块
(1)RF接收天线接收传感器发出的433.92MHz波段的信号;
(2)MCU将信号分析处理后通过CAN/LIN信号的方式传达给车辆
4.3 功能

| 上电自检 | ●3s内完成自检,无故障时,故障报警灯在3s内熄灭 ●若传感器ID重复/未标定/读取错误灯,则进行故障报警 |
| 数据存储 | ●IGN OFF时,接收器收到传感器发的数据,存储起来,不向外发 ●IGN ON时,接收器收到传感器发的数据,向外发送CAN数据 (包含胎压、温度) |
| 欠压报警 | ●当低于标准压力P的75%时,发出低压报警 |
| 过压报警 | ●当高于标准压力P的125%时,发出高压报警 |
| 过温报警 | ●当温度≥85℃,高温报警 |
| 传感器丢失 | ●车辆行驶中,车速>25km/h且超过10min,未收到某个或多个传感器信号,发出通信丢失报警 ●出现该报警并非是传感器本身故障导致,主要原因为无线通讯环境波动。而会对车内无线通讯环境造成影响的因素较多,如加装第三方导航、行车记录仪、点烟器扩展、对讲机、高频无线通讯设备、高频信号干扰设备等都有可能导致这一问题
|
| 传感器低电量 | ●当电池电压<2.3V,发出低压报警 (电池寿命要求10年左右)
|
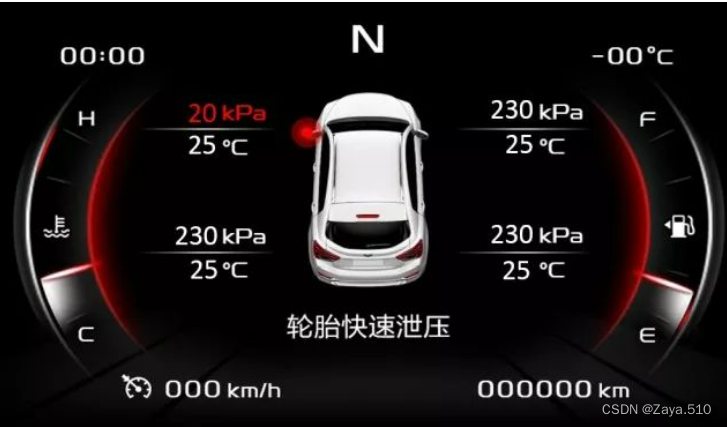
| 快速漏气报警 | ●以>30kPa/min下降时且漏气量>0.3bar时,报快速漏气报警
|
| 通信丢失 | ●车辆行驶中,车速>25km/h且超过10min,未收到某个或多个传感器信号,发出通信丢失报警 |
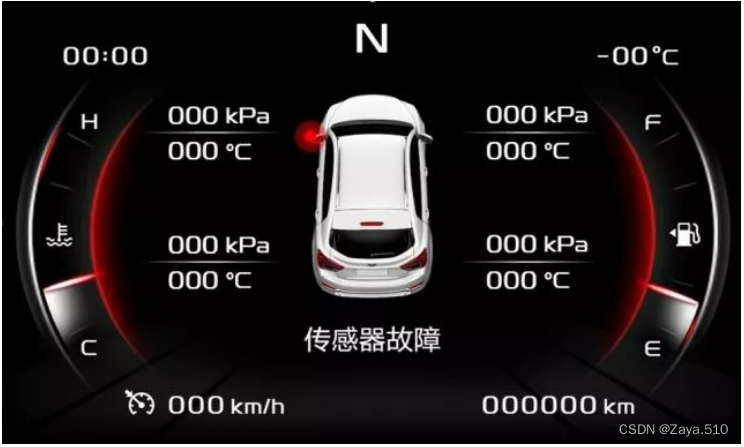

4.4 在仪表上的符号显示:黄色

4.5 标定
(1)标定设备发出LF低频信号给4个胎压传感器,传感器收到后发出高频信号
(2)标定设备收到高频信号后开始解析,将解析的传感器ID和位置信息记录
(3)在电检时,通过诊断服务将记录下来的ID写入接收器中,完成标定
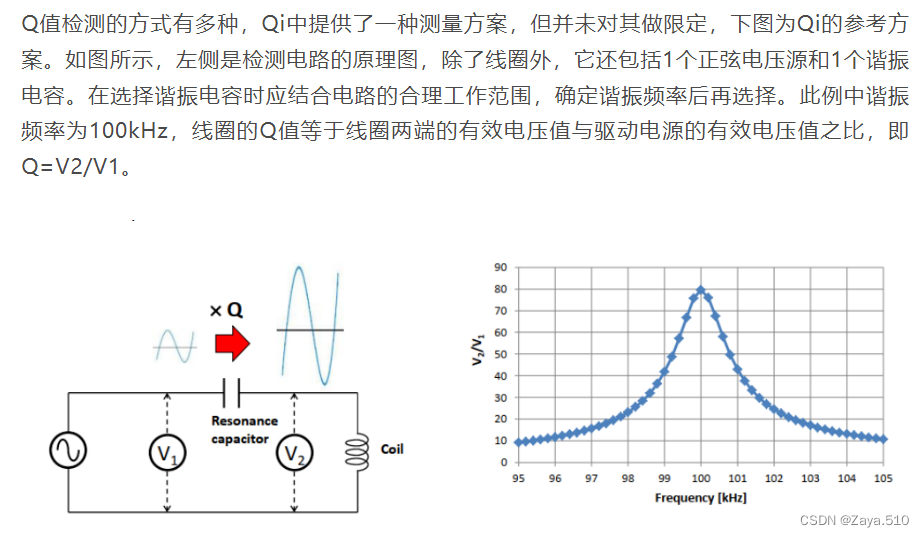
十二、无线充电
1、介绍
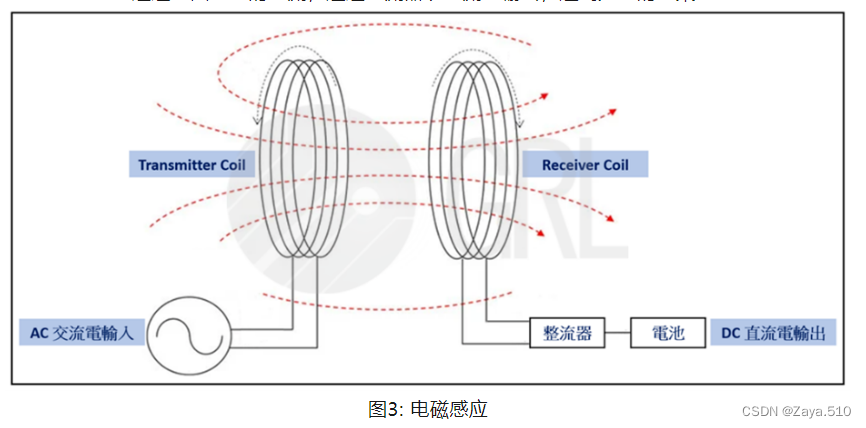
无线充电方式有4种,其中电磁感应技术最为成熟,效率最高
| 电磁感应 | ●手机和充电设备里各安装一个线圈,当通电时,设备里的线圈会产生交流电,这时候手机如果与它靠近手机里的线圈发生电磁感应,线圈就开始作业,将电磁能转化成电能,再通过装置转为直流电以完成手机的充电。 ●这种充电方式所要求的电路结构比较简单,成本也不会太高。但是,这种充电方式存在一个缺点,那就是传输的距离过短(数毫米~数厘米),如果手机摆放的位置不对,就很有可能充不上电,或者充电速度特别缓慢。
|
| 磁场共振 | ●电磁共振也需要手机和充电设备的相互作用,需要两方的谐振器产生一个磁场共振,实现能量的转化。 ●这种技术不需要手机和充电平台的接触,只需要让两者的LC谐振频率保持一致就可以了,这样即使相隔一定距离,也可以进行无线充电,适用于距离比较长的传输。不过缺点在于充电的效率会比较低。 |
| 无线电波 | ●这种充电方式是在供电方上配置一个可以进行无线电波发射的设备。 ●有了一个发射设备,就必须要有一个接收设备,以一种直流电压输出和输入的方式进行充电。这种充电方式虽然电流传输速度快,但是稳定性和安全性都很低,研发的成本也很高。 |
| 电场耦合 | ●原理是通过沿垂直方向耦合两组非对称偶极子而产生的感应电场来传输电力。这种充电方式转换率很高,两者的位置也可以不用固定,但有一个很大的缺点,那就是需要设备的体积更大,功率也特别小。 |
1.1 无线充电协议
无线充电技术有2大标准组织:AirFuel(PMA和A4WP合并)、WPC
| A4WP | ●Alliance for Wireless Power,由美国高通公司、韩国三星公司以及PMA的Powermat公司共同创建的无线充电联盟 ●采用磁共振技术 ●2015年与PMA合并,并更名为AirFuel alliance |
| PMA | ●power matters alliance,由Duracell Powermat公司发起 ●采用磁感应技术 ●电磁波频率:277~357kHz ●推出一款WiCC充电卡,比SD卡大一圈,卡片薄,嵌入手机电池旁即可实现非接触式充电 |
| WPC | ●Wireless Power Consortium,无线充电联盟,推出Qi无线充电标准 ●采用磁感应技术 ●电磁波频率:100~205kHz ●具有便捷性和通用性,只要经过Qi认证的可以为不同品牌充电
|

1.2 Qi协议
(1)汽车上使用的无线充电设备还是以Qi为准,因此讲一下Qi,WPC规定只有经过Qi认证的产品才能使用Qi logo,Qi主要采用的是电磁感应的方式
(2)Qi目前最新标准Qi-V1.3,在Qi-V1.2.4的基础上增加了Authentication机制,使Receiver可藉由该过程确认Transmitter是否为Qi认证产品后,再决定要与Transmitter进行何种的充电协议;这表示当Receiver向Transmitter发起的Authentication验证机制如未能完整地执行时,Receiver可以拒绝与Transmitter进行任何沟通或是仅可以透过最低的充电功率(5W)进行充电,藉此来确保市场上多种无线充电产品之间使用上之安全性
(3)Qi的认证测试,主要有以下2种:
| Compliance Testing (DUT需被送往ATL(Authorized Test Lab)并依照WPC所制定的Qi Specification来进行验证 | ●Transmitter与Receiver之间通信协议的时序 ●移动线圈 (XYZ轴平移)测试功率输出能力 ●最大可供给功率之传输测试 ●FOD (Foreign Object Detection) 异物测试 |
| Interoperability Testing(IOP) 完成Compliance Testing后,DUT需被送往IOC(Interoperability Testing Center)并与上百种先前取得Qi 认证之品进行兼容性的测试,确保所有在市面上有Qi Logo的Transmitter与Receiver之间能够建立无线充电通信协议 | ●待测物应在3秒内与IOP测试之产品建立通讯协议 ●待测物在低电量(10%~20%)的情况下,仍须维持充电5分钟 |
(4)Qi完整认证流程如下:
Step 1. Manufacturer填写产品数据并选择Authorized Test Lab 与 Interoperability Testing Center。
Step 2. 由LLA(Logo License Administrator)验证Step 1所填数据正确无误。
Step 3. 由ATL进行Compliance Test并上传测试结果。
Step 4. 由IOC进行Interoperability Test并上传测试结果。
Step 5. 由Manufacturer再次确认产品数据、型号及外观。
Step 6. 由LLA验证上述测试结果及数据皆正确后,该测试产品即会在已认证产品页面上出现。
(5)Qi产品分类
WPC将产品分为BPP、EPP
| BPP | ●Baseline Power Profile ●输出功率必须≤5W |
| EPP | ●Extended Power Profile ●输出功率在5~15W之间 |
| EPP5 | ●输出功率为5W,但必须支持与EPP之间的无线通信协议 |
(6)Qi认证版本
-
Qi–V.1.2.4 BPP
-
Qi–V.1.2.4 EPP
-
Qi–V.1.3 BPP
-
Qi–V.1.3 EPP5
-
Qi–V.1.3 EPP
1.3 关于无线充电国家标准
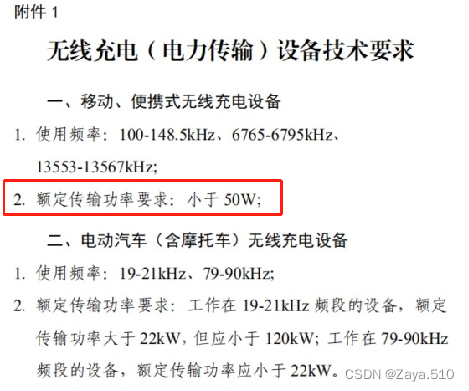
工信部发布了《无线充电(电力传输)设备无线电管理暂行规定(意见征求稿)》,自2022年1月1日所有生产、进口在国内销售、使用的移动和便携式无线充电设备额定传输功率要求小于50W。
1.4 各个手机厂家情况
| iPhone | ●从2017年的iPhone8开始,手机集成了无线充电功能 ●能与Qi认证的无线充电器适配,以7.5w额定功率充电 ●使用苹果自己推出的MagSafe充电器,满足Qi还可以实现最高15W给iPhone进行无线充 |
| 华为 | ●最高50W的额定功率无线充电(私有无线充电协议) |
| 小米 | ●最高67W的额定功率无线充电(私有无线充电协议) |
| oppo | ●最高40W的额定功率无线充电(私有无线充电协议) ●最高10W的Qi无线充电 |
1.5 FOD
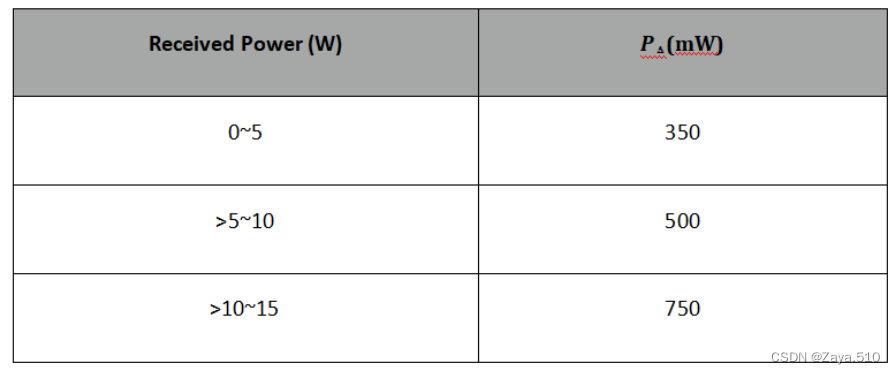
Foreign Object Detection,异物检测,是无线充电过程中,为避免意外来物导致系统温升过高的一种技术检测手段。如果异物是金属等导体,那么在交变的磁场中势必会产生感应电动势,在导体内部形成感应电流,而此时金属相当于一个电阻,由此高热产生,引发危害。

(1)FOD检测手段
共有2种检测方式:power loss和Q值
| power loss |
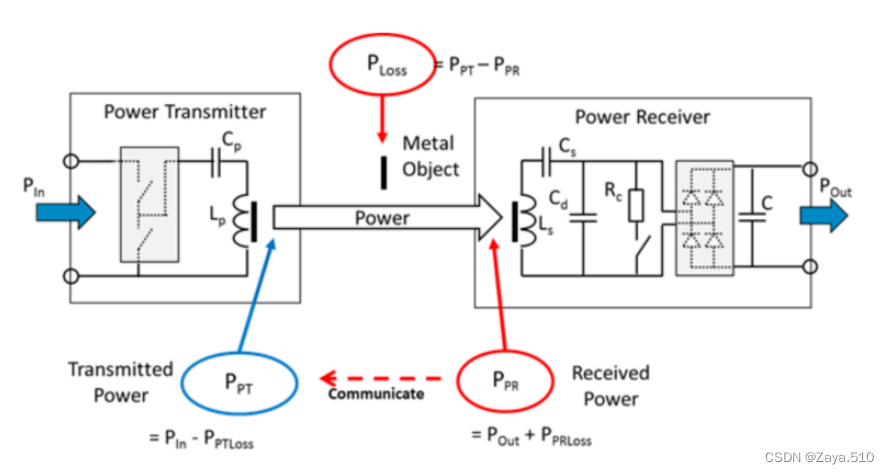
● ●计算公式: ●power loss方法检测FOD需依赖TX和RX报的功率是否准确,会有一些不可测因素,如自由度影响,不同负载下的TX和RX都有offset补偿,为了防止TX误报FOD,通常RX端上报的 因此,如果TX没有异物,RX报的功率总是大于TX的
●特点:可以实时检测FOD,功率的估算是TX和RX各自估算,存在偏差,误报FOD的可能性大 |
| Q值 | ●Q值是衡量电感器件的主要参数,是指电感在某一频率的交流电压下工作时,其呈现的感抗与等效损耗电阻之比,Q值越高,电感器损耗越小;TX线圈的Q值会受外部环境影响,比如当其表面有其他金属时,那么就会导致TX线圈的电感减小,而等效阻抗增加,所以Q值就会减小。 ●Qi的EPP协议里规定,TX在negotiation phase必须包含Q值检测功能,以此判断表面是否有异物。为了确保TX能正确判断出Q值减小的原因是RX线圈还是异物导致的,RX应通过0x22包提供一个参考Q值给TX,TX再根据该值确定出合理的Q值裕量,最终与实测值比较,判断是否存在异物 ●Q值检测方法: Qi提供了一种测量方案:一般汽车无线模块用的Q值检测方法
|
3、相关参数
以汽车无线充电产品为例:
| 工作频率 | 127.7KHz |
| 充电距离 | 3~10mm(发射线圈-接收线圈) |
| 噪声 | 大功率如50W额定功率,会加散热风扇,≤48dB |
| 转换效率 | ≥70% |
| 通信 | CAN,带诊断及刷写 |
| 可充电范围 | 20*70mm(三线圈) |
十二、实际应用
1、TBOX
以4G TBOX为例,主要是各个模块的参数和大致选型参考
1.1 首先TBOX联网
网络实现:4G模块+SIM卡,SIM卡有3种规格,标准卡、Micro SIM、Nano SIM,TBOX里还有另外一种,更小型化的eSIM,eSIM体积小,直接焊接到板子上,免去插拔SIM卡麻烦,节约空间,增强可靠性
4G模块一般有2跟外接天线,一根主天线,一根副天线
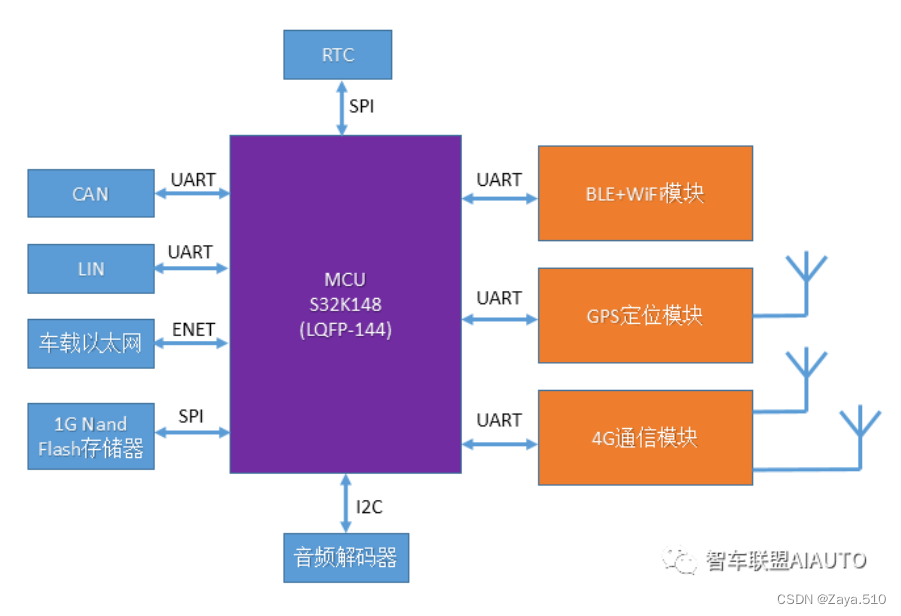
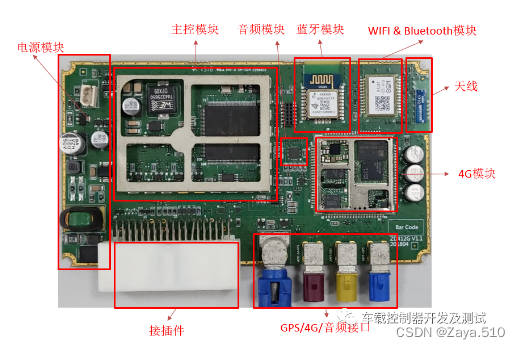
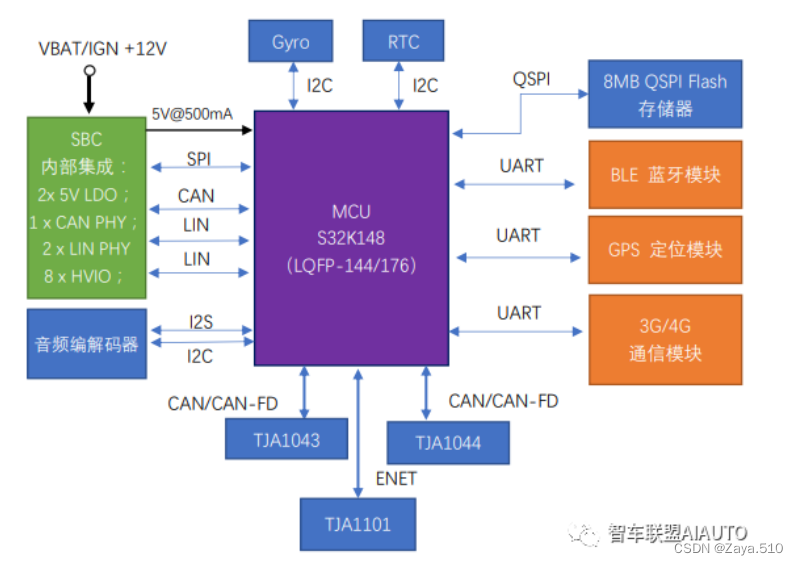
1.2 TBOX硬件组成
TBOX模块里包含主芯片MCU,BLE和WiFi二合一模块,GPS定位模块,4G通信模块,RTC,CAN,LIN,车载以太网,Nand Flash/EMMC。其中GPS有个外接天线,4G模块有一个主天线,一个副天线。连接关系如下图:
| 模块名称 | 型号和参数 | ||||||||||||||||||||||||||||||||||
| SBC | ●集成电源管理、CAN收发器、LIN收发器 ●芯片型号:UJA1078ATW | ||||||||||||||||||||||||||||||||||
| MCU | ●芯片型号:NXP的MC9S32KEQ512CAG
| ||||||||||||||||||||||||||||||||||
| BLE+WiFi二合一模块 | ●芯片型号:ESP32,450-0169C,i1459-sp,W58 ●模块大多以邮票孔封装为主,外观如下图
●BLE+WiFi模块与主芯片MCU用UART串口通信,注意主芯片的TX接到BLE+WiFi模块的RX上,主芯片的RX接到BLE+WiFi模块的TX上 | ||||||||||||||||||||||||||||||||||
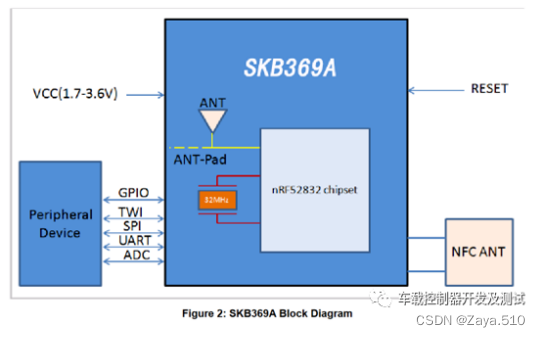
| 蓝牙模块 | ●芯片型号:SKB369
| ||||||||||||||||||||||||||||||||||
| 蓝牙、WiFi天线 | ●芯片型号:antenova 的A5839 ●参数如下:
| ||||||||||||||||||||||||||||||||||
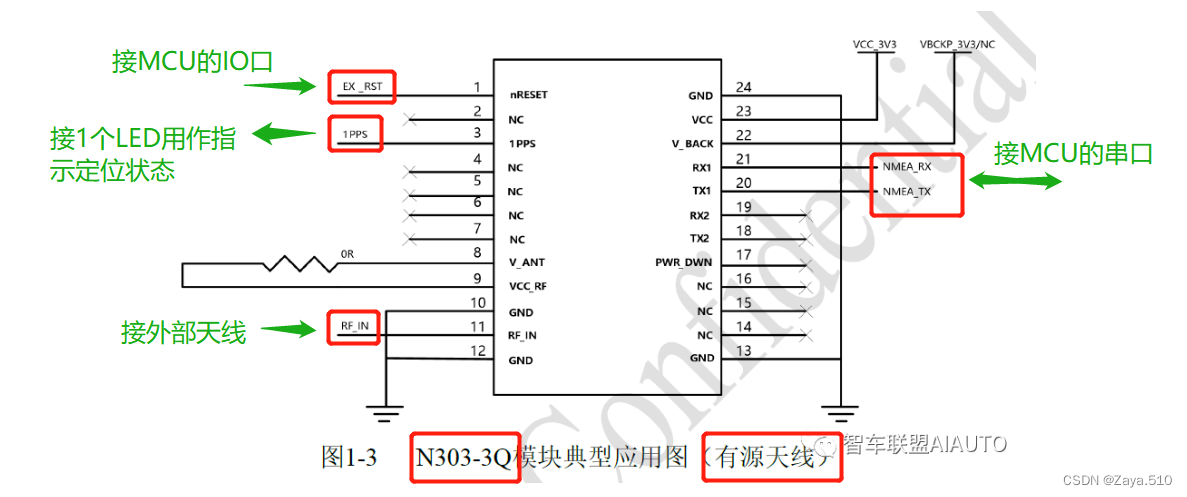
| GPS定位模块 | ●芯片型号:泰斗的N303-3Q,UBLOX的NEO-M8
●GPS一般外接一根天线 | ||||||||||||||||||||||||||||||||||
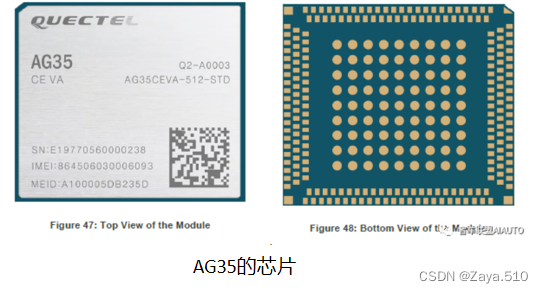
| 4G通信芯片(通常会集成在4G模组内) | ●芯片型号:移远的AG35,华为的ME909S
●4G模块与MCU是串口通信,自身需要外接2个天线,一根主天线,一根副天线,其他根据需求选择连接 | ||||||||||||||||||||||||||||||||||
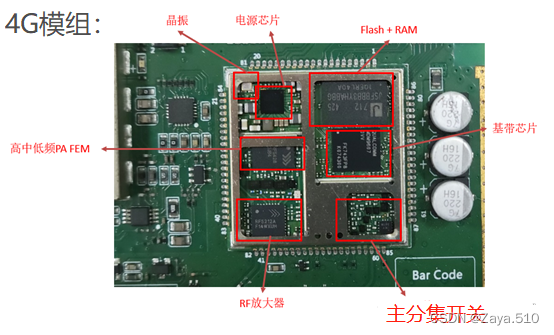
| 4G模组 | ●高通的4G模组: ●模组包含了基带,晶振、电源、存储模块和RF AP以及天线等,以及可支持GPS定位:
●发射数据传输路径: 基带芯片(高通 9607)->调变器(Modulator)->混频器(Mixer)->带通滤波器(BPF)->功率放大器(PA)->接收器(Tx)传送到天线输出。 ●接收数据传输路径: 天线->接收器(Rx)->带通滤波器(BPF)->低噪声放大器(LNA)->混频器(Mixer)->解调器(Demodulator)->基带芯片(高通 9607) | ||||||||||||||||||||||||||||||||||
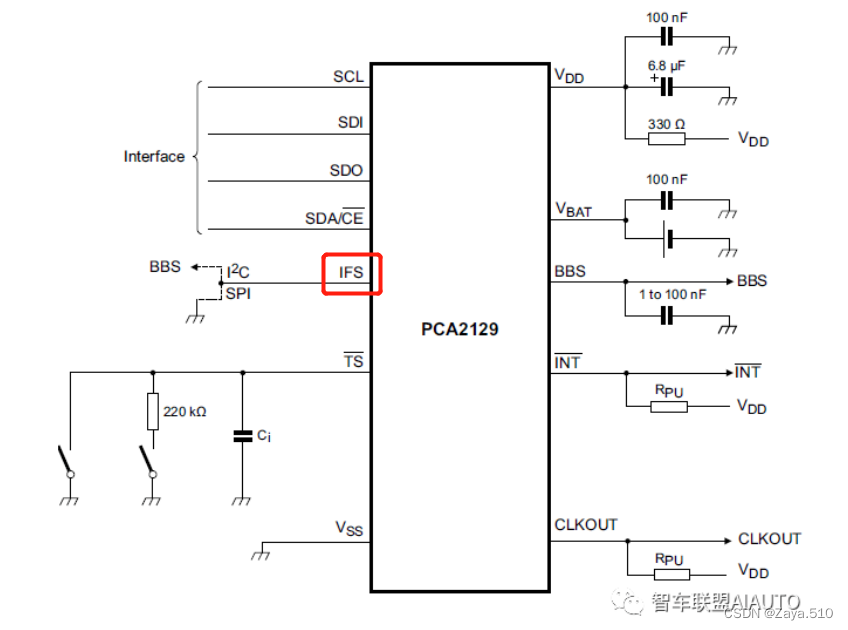
| RTC:Real Time Clock,实时时钟 | ●芯片型号:美信的DS1342,NXP的PCA2129,EPSON的RA8900CE
● PCA2129可选择使用I2C通信或者SPI通信,选用管脚是IFS,接到VDD就选用I2C通信模式,接到VSS就选用SPI通信模式 | ||||||||||||||||||||||||||||||||||
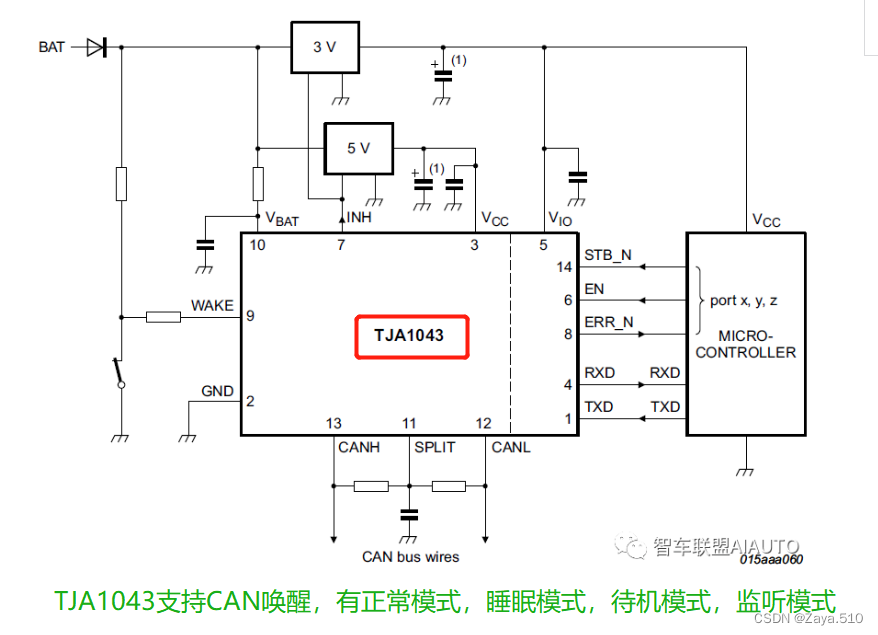
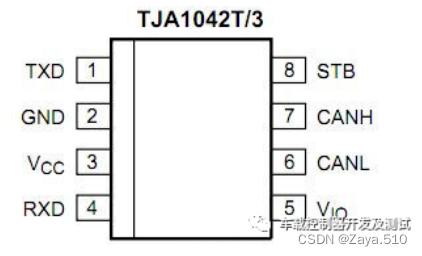
| CAN收发器 | ●芯片型号:NXP的TJA1043,ON的NCV7341,Microchip的ATA6560
| ||||||||||||||||||||||||||||||||||
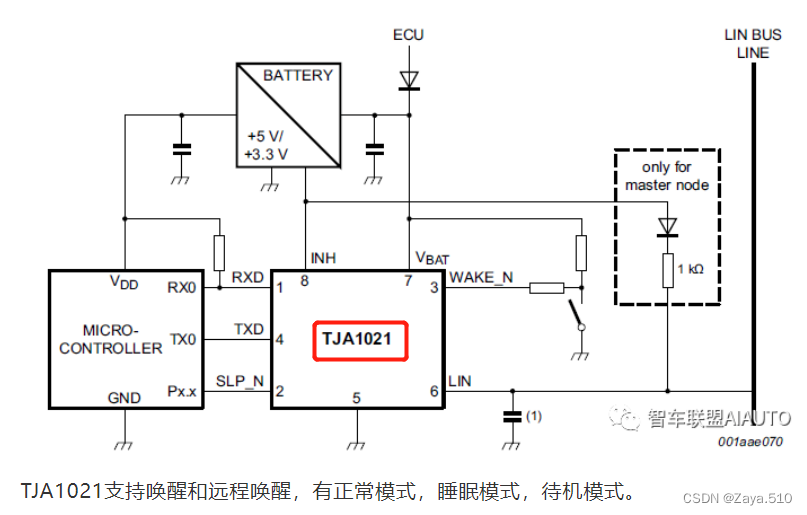
| LIN收发器(一般TBOX用不到) | ●芯片型号:NXP的TJA1021,Microchip的ATA663211
| ||||||||||||||||||||||||||||||||||
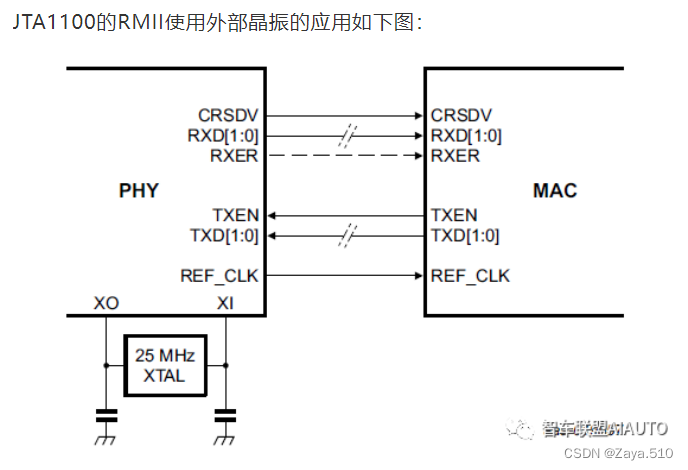
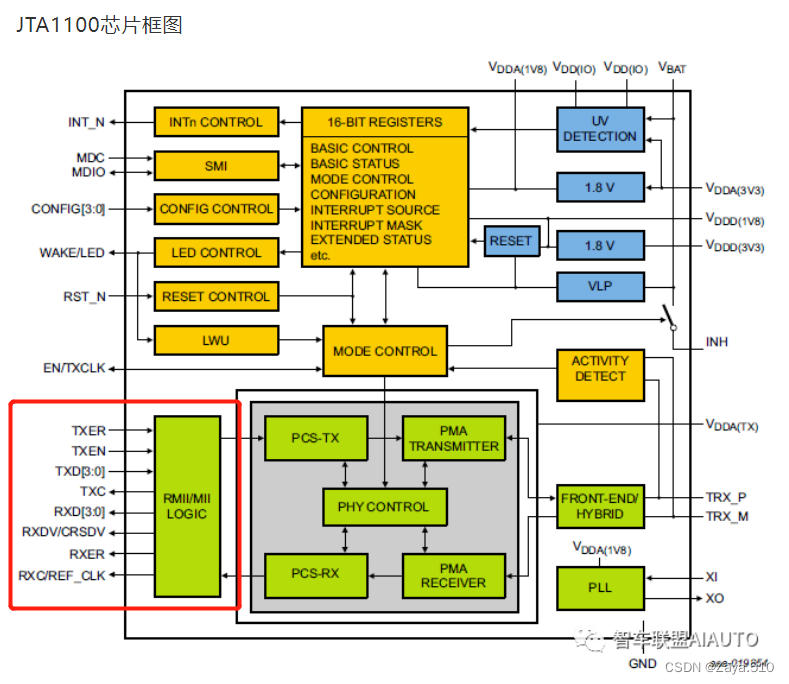
| 车载以太网PHY收发器 | ●芯片型号:NXP的TJA1100,Microchip的KSZ8091MLX
| ||||||||||||||||||||||||||||||||||
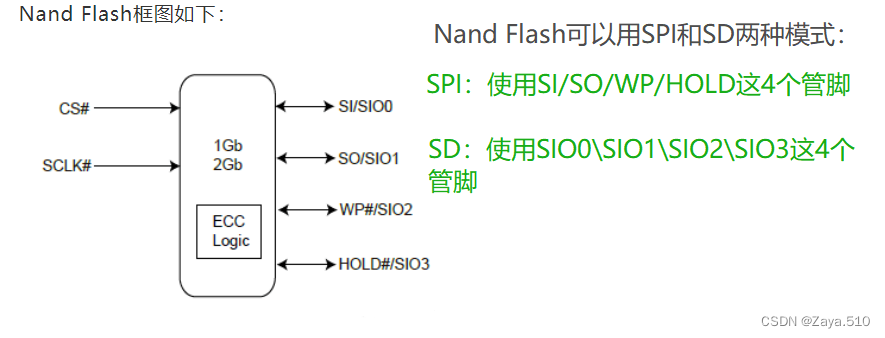
| Nand Flash/EMMC | ●用来存储数据 ●Nand Flash芯片型号:MXIC的MX35LF1GE4AB,FOUNDER的MKDV1GCL ●EMMC芯片型号:东芝的THGBMHG6C1LBAB6,镁光的MTFC8GLDEA-4M IT
| ||||||||||||||||||||||||||||||||||
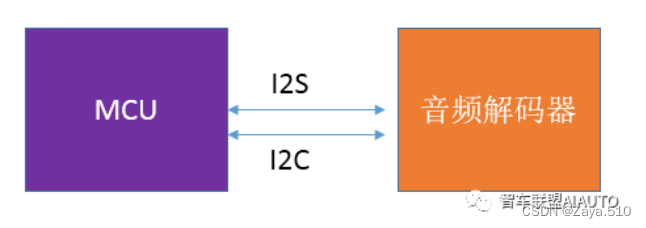
| 音频解码器 | ●i-Call(信息服务),B-Call(故障救援服务),E-Call(紧急救援服务),这三个功能在硬件上只需要对按键的判断是否按下就可以了,通话部分需要硬件有音频的编解码芯片,去对音频进行处理传送到喇叭和车上的MIC。
| ||||||||||||||||||||||||||||||||||

2、BCM
2.1 特斯拉model3的FBCM
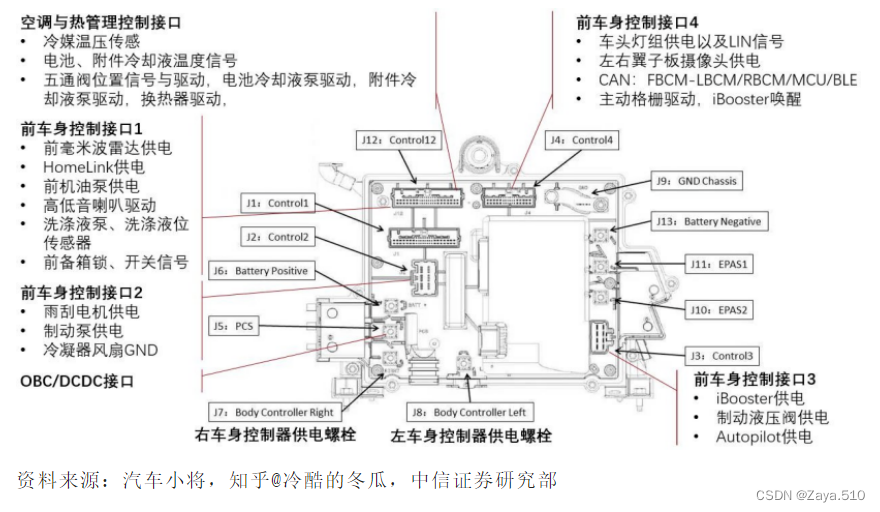
FBCM的功能
铝合金外壳,提高碰撞保护
布置的离蓄电池近,方便取电
给i-booster、ESP 车身稳定系统、EPS 助力转向、前向毫米波雷达、如冷却液泵、五通阀、换热器、冷媒温度压力传感器等、车头灯、机油泵、雨刮等供电,还给左右车身控制器供电,左右车身控制器随后还将用这两个接口中的能量来驱动各自控制的车身零部件。
FBCM的接口布局:
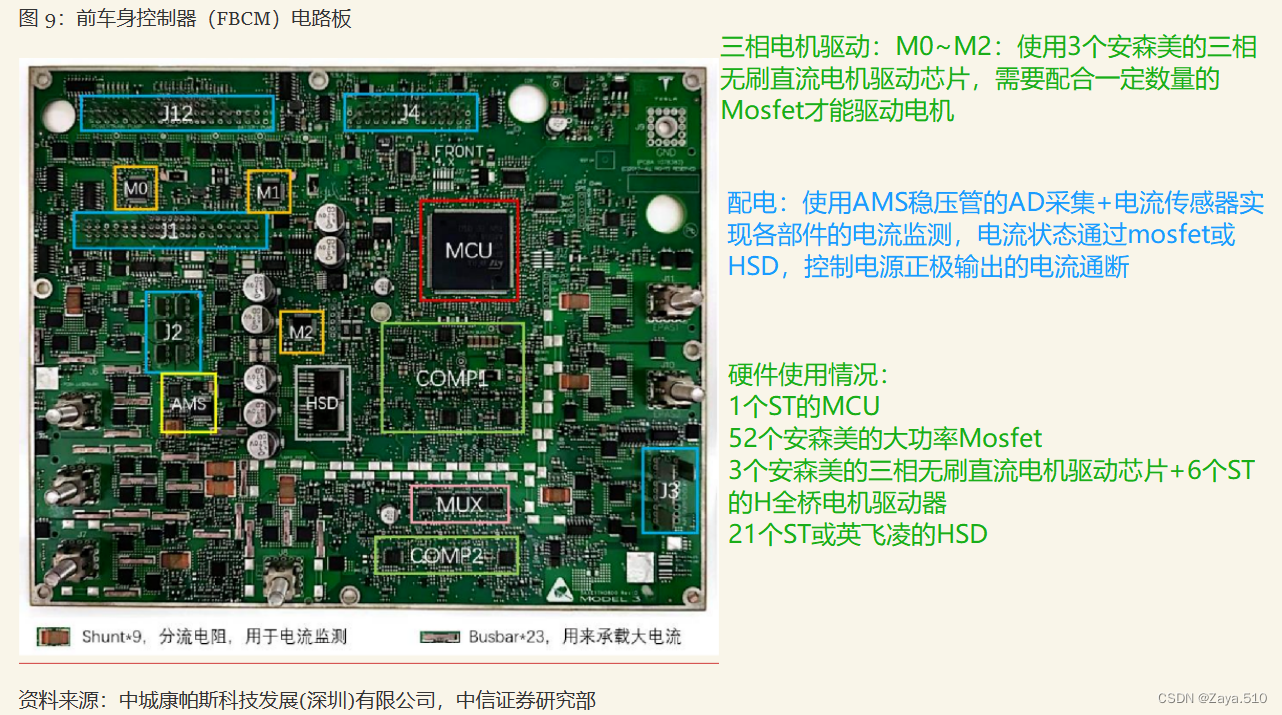
FBCM的电路PCBA
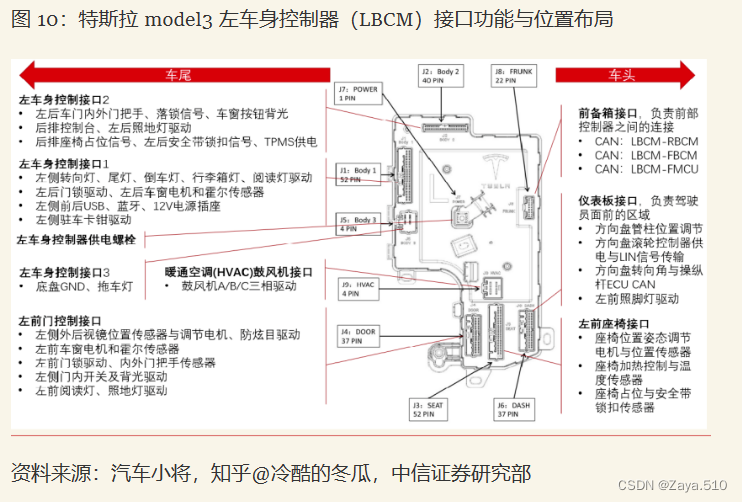
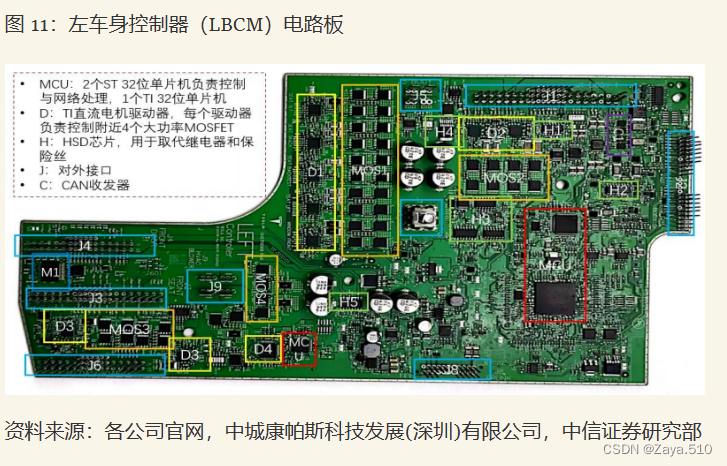
2.2 特斯拉model3的LBCM
LBCM的功能
塑料外壳
给仪表板、方向盘位置调节、照脚灯、左前座椅、左后座椅、前门、后排车门、座椅、尾灯等供电和控制
LBCM的接口布局:
LBCM的电路PCBA
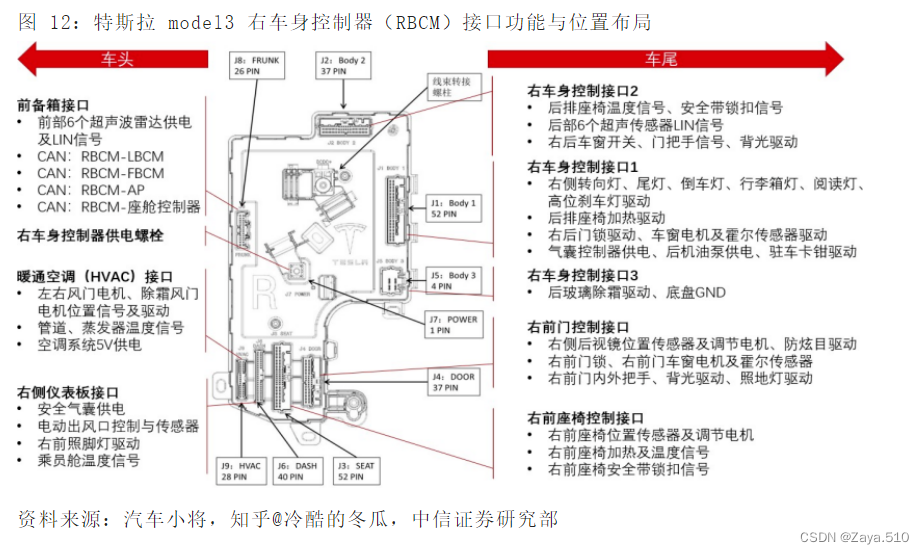
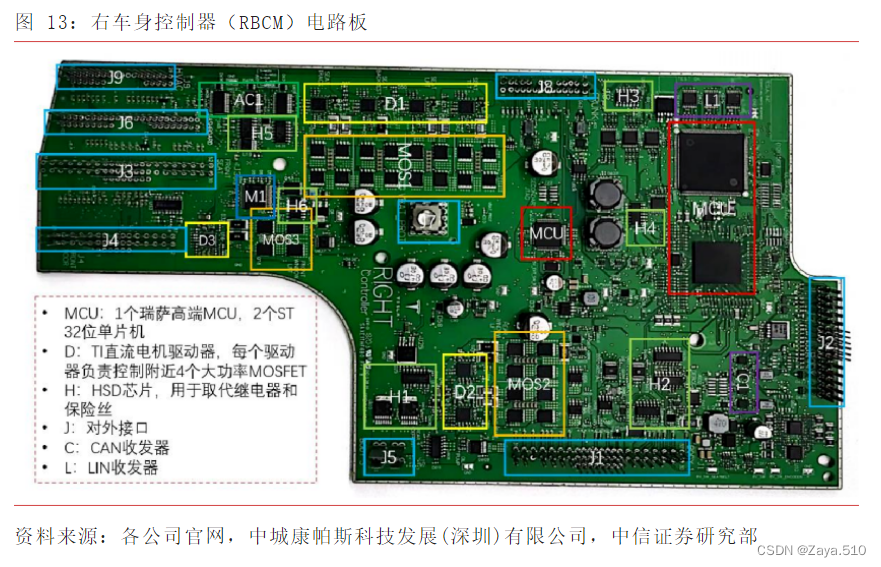
2.3 特斯拉model3的RBCM
RBCM的功能
塑料外壳
右车身控制器与左车身基本对称,接口的布局大体相同,也有一些不同点,右车身域负责超声波雷达以及空调,同时右车身承担的尾部控制功能更多一些,包括后方的高位刹车灯和后机油泵都在此控制右车身信号较多,所以将主控单片机从左车身的 ST 换成了瑞萨的高端单片机 RH850 系列。此外由于右车身需要较多的空调控制功能,所以增加了3片英飞凌的半桥驱动器芯片
RBCM的接口布局:
RBCM的电路PCBA
2.4 传统的BCM设计
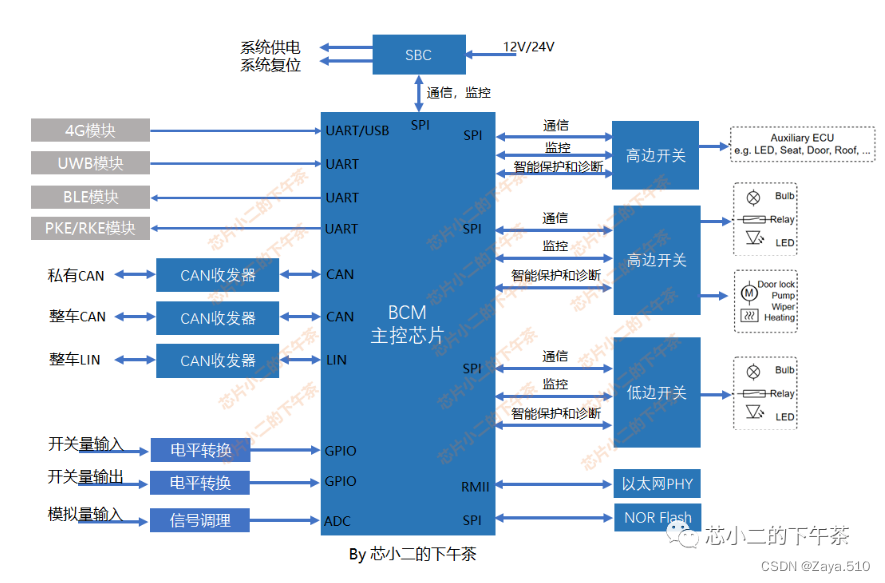
功能
●外灯光系统控制:远/近光灯,雾灯,日行灯,转向灯,刹车灯
●内灯光系统控制:指示灯,阅读灯,顶灯,踏步灯
●雨刮(洗涤)控制:前后雨刮,喷水,雨量感应自动雨刮灯
●电源管理:高低压保护,延时断电,系统休眠
●门窗控制:车窗升降,天窗开合,远程开闭锁,中控开闭锁灯
●喇叭控制,门锁控制,胎压检测灯,后视镜控制
●网关功能
芯片选型
TI的BCM方案
Body control module (BCM) design resources | TI.com
ST的BCM方案
Body Control Module (BCM) - STMicroelectronics
infineon的BCM方案
| 芯片名称 | 参数 | ||||||||||||||||
| MCU | ●一般要求满足ASILB及以上 ●芯片型号:ST的SPC56和SPC58系列最常见 ●SPC56EC74L8
| ||||||||||||||||
| RF收发器 | ●芯片型号:Atmel的ATA5833 | ||||||||||||||||
| CAN收发器 | ●芯片型号:NXP的TJA1043 | ||||||||||||||||
| LIN收发器 | ●芯片型号:NXP的TJA1021 | ||||||||||||||||
| 三相无刷直流电机 | ●芯片型号:安森美的LV8907,配合使用安森美的mosfet:NVMFS5C426N 主要用于控制风扇电机的 | ||||||||||||||||
————————————————————————————
参考文章:
万字详解车联网、V2X以及通信模式_51CTO博客_车联网V2X
汽车无线模组研究:向5G/C-V2X/GNSS/智能天线集成一体化方向发展_搜狐汽车_搜狐网
从零认识dB和dBm以及dBi、dBd、dBc和dBV_兰陵小晨的博客-CSDN博客
天线的回波损耗和驻波比_jiaqiang03的博客-CSDN博客
下一代汽车钥匙-第三代汽车数字钥匙(UWB/BLE/NFC)
UWB的定位算法(简单详细易懂)_uwb定位算法_小阳先生的宝库的博客-CSDN博客
TPMS胎压检测系统使用介绍┃详解胎压检测系统的工作原理及注意事项
GNSS定位精度统计量(百分位、CEP、RMS、σ、ppm等)_定位cep_路痴导航员的博客-CSDN博客一文了解自动驾驶中的时间同步
5星16频是什么意思?5星21频又是什么意思?看完你就明白了

















 2057
2057

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









