







 文章详细介绍了基于双MCU的整车控制器的硬件设计,强调了可靠性设计原则,包括元器件选择、冗余设计和电磁兼容性措施。主MCU和辅MCU分别负责数据采集与安全功能,电源管理模块确保稳定供电,而CAN收发器则用于通信。此外,文中还讨论了模拟信号输入、开关输入和传感器接口等关键模块的设计考虑。
文章详细介绍了基于双MCU的整车控制器的硬件设计,强调了可靠性设计原则,包括元器件选择、冗余设计和电磁兼容性措施。主MCU和辅MCU分别负责数据采集与安全功能,电源管理模块确保稳定供电,而CAN收发器则用于通信。此外,文中还讨论了模拟信号输入、开关输入和传感器接口等关键模块的设计考虑。
目录
本文针对双MCU的整车控制器硬件设计做个总结
————————————————————————————
一、可靠性设计原则
基于整车环境以及电机、动力电池传输的母线电流变化大,产生的空间电磁干扰强
工作空间的温度变化范围广,振动强度大,因此会造成:
①数据采集误差变大
②控制状态失灵
③程序运行失常
④电源系统损坏
以上,为了保证控制器的运行正常,采用元器件级可靠性设计+系统可靠性设计结合的方法
| 方法名称 | 具体说明 | 举例 |
| 元器件可靠设计 | 选用集成度高的元器件,这样可以降低电路板元器件数量、电路板布线简单,减少焊盘和连线,大大减少受干扰概率,增加电路板抗干扰能力 | 例如: ①选择集成多输出低边驱动的运算放大器 ②选择系统基础芯片(SBC),集成CAN模块+LIN模块+电源管理模块(BCM和大屏通常这么选,但VCU和BMS通常都是单独的电源管理芯片) |
| 芯片的温度控制范围 | -40~+125℃的使用环境 | / |
| 部件的冗余设计 | 在系统上增加冗余资源,或将故障隔离并校正错误使系统即使发生故障或差错,功能也不受影响,例如双MCU设计 | 例如:主MCU进行数据采集,输出指令完成整车功能,辅MCU做诊断,在主MCU故障时,执行输出完成整车基本安全功能 |
| 系统 电磁兼容性设计 | 采用滤波、去耦电路、屏蔽、隔离、搭铁等方式 | ①板上电源与外围传感器的供电电源相互独立,12V电源入口处进行ESD、浪涌防护、防反接及电压采样和滤波处理 ②数字电路、模拟电路和高速通信电路分区布置,并加入滤波和去耦电路 ③采用4层电路板设计,有独立的搭铁平面和电源平面,并且信号线和搭铁线间距可以很紧密,减少共模阻抗和感性耦合 |
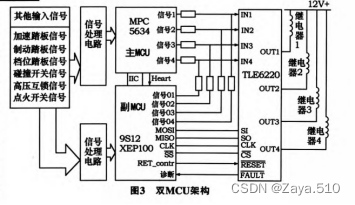
二、整车控制器硬件架构
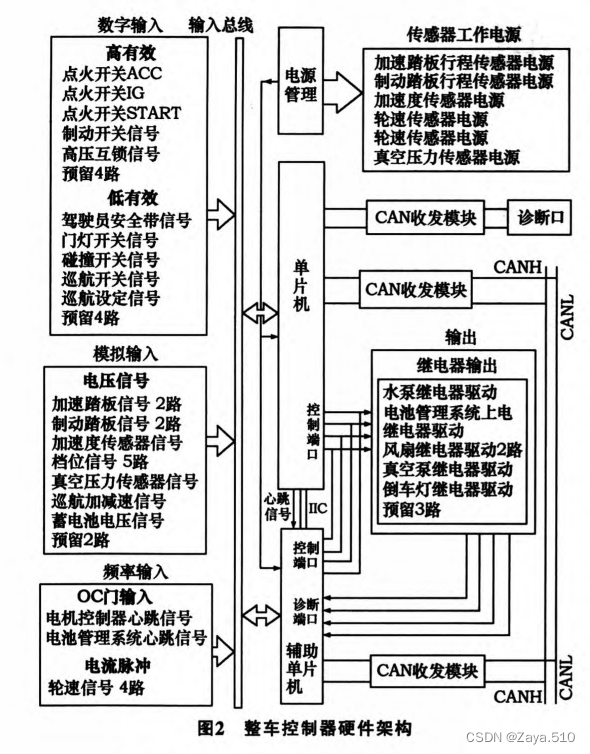
三、各功能模块介绍
1、主MCU
主控芯片,负责数据采集和处理,常采用32位的单片机,基于5V供电,在运算能力、存储空间、数字量模拟量输入输出及CAN通信上表现很好,一般主MCU都会集成CAN2.0A和CAN2.0B的CAN模块,也就是说,PCBA上不用再有CAN控制器,只要有CAN收发器即可
2、辅MCU
常采用16位MCU,在BCM中对PEPS和防夹做备份,作用是故障诊断,通过心跳信号监测主MCU的运行情况,在主MCU故障时,继续采集安全类的信号,安全情况允许下,关闭主MCU的CAN收发器,代替主MCU执行安全功能并给执行输出,一般辅MCU都会集成CAN2.0A和CAN2.0B的CAN模块,也就是说,PCBA上不用再有CAN控制器,只要有CAN收发器即可
3、电源管理模块
提供5V电源,有较高的抗扰能力,能为整车以及外围传感器提供稳定的电压(感性负载在关断时有浪涌电压干扰,大负载开启时有电压跌落、电源反接以及抛负载等电源线的传导干扰,还要应对外界的电磁干扰,为了降低整车控制器的静态电流,对板上以及外围电路分开供电以降低功耗,有的电源芯片会内嵌看门狗,对所有输出的5V供电进行电压监测并反馈给MCU
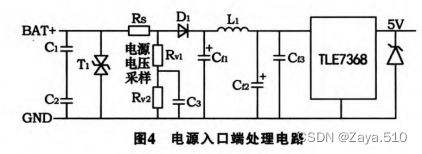
—C1和C2是防静电电容,串联目的为了防止单个电容短路引起的电源线短路
—T1为TVS管,作用是吸收大能量的浪涌脉冲,如ISO7637里的脉冲5b和其他电源线正脉冲干扰
—Rs为限流电阻,和Cn形成低频滤波,此电阻一是防止模块上电时由于去耦电容过大引起二极管的损坏
—Rv1和Rv2是用来监测电源电压的分压电阻,一般要较高的精度
—C3为采样滤波电容,滤除不必要的瞬态干扰
—D1用作逻辑电源的反接保护,根据5V系统的电流来选择,一般使用S1G二极管
—L1为共模电感,提高模块电磁兼容性
—Cf2为去耦电容,采用大容量电解电容
—Cf3为高频旁路电容,采用陶瓷贴片电容来实现高频电压脉冲干扰的滤除
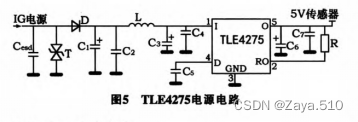
4、外围传感器工作电源5V
由IG电转换得到,如下图,滤波原理基本相似,控制器板上和板外的电源分离进一步提高系统可靠性
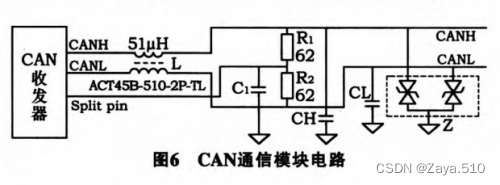
5、CAN收发器
6、继电器驱动芯片
具有过温、过压、短路保护,故障信息通过SPI总线进行传输,主MCU的IN1~IN4控制继电器,当辅MCU监测到主MCU故障时,将由辅MCU控制IN1~IN4,整个过程,由辅MCU通过SPI总线读取继电器的故障信息
开关输入信号采集(高有效/低有效,模拟信号,脉冲信号)
该输入电路设计要满足以下约束:
①对电源和对搭铁的短路保护
②单片机的高低电平阈值要求
③电压钳位和单片机注入电流要求
④静电和传导干扰防护要求
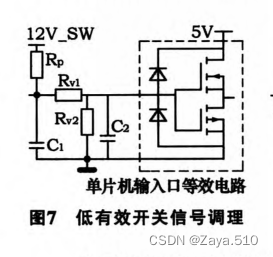
7、低有效开关
—Rp要满足约束①中对电源和对搭铁的短路保护
—分压电阻Rv1和Rv2需要满足约束②和约束③要求
—电容C1和C2要满足约束④的要求
根据设计过程中的相关参数值要根据约束进行选值
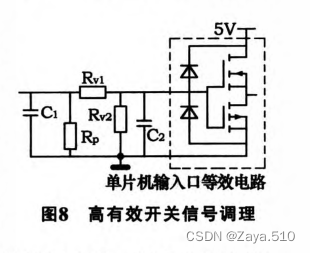
8、高有效开关
与低有效电路一样,但不用考虑约束①中对电源短路和对搭铁短路的要求
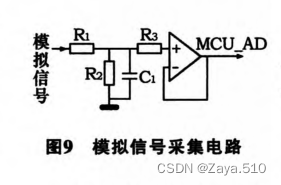
9、模拟信号输入
传感器的模拟电压输入范围在0~5V,这类信号滤波后为增加驱动能力,一般用电压跟随器送到MCU的AD口进行A/D转换
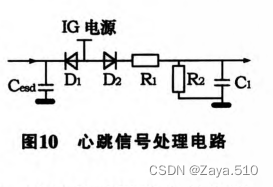
10、心跳信号
包括来自电机控制器和BMS的心跳信号以及轮速传感器的轮速信号,心跳特性:OC门输出,频率1Hz
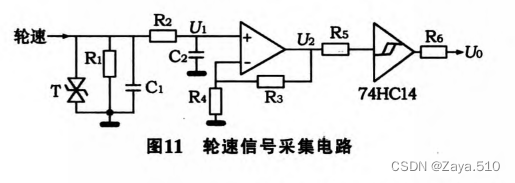
11、轮速传感器
轮速传感器为霍尔信号,轮速传感器输出的信号为电流脉冲
—R1为采样电阻,将输入电流脉冲转化为电压脉冲
—C1为输入滤波电容
—T为瞬态抑制二极管
—U2为运放输出电压U2=U1*(1+R3/R4),对U1电压进行放大
—74HC14,将放大后的U2进行整形,变成单片机可识别的脉冲信号U0,最终送入单片机的输入捕捉口
————————————————————————————
文章参考:

















 4314
4314

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









